一种垃圾亭垃圾装卸智能调控装置的制作方法
1.本发明涉及垃圾处理技术领域,尤其涉及一种垃圾亭垃圾装卸智能调控装置。
背景技术:
2.垃圾是人类日常生活和生产中产生的固体废弃物,由于排出量大,成分复杂多样,且具有污染性、资源性和社会性,需要无害化、资源化、减量化和社会化处理,如不能妥善处理,就会污染环境,影响环境卫生,浪费资源,破坏生产生活安全,破坏社会和谐。垃圾处理就是要把垃圾迅速清除,并进行无害化处理,最后加以合理的利用。当今广泛应用的垃圾处理方法是卫生填埋、高温堆肥和焚烧。垃圾处理的第一站就是从垃圾桶到垃圾亭处的垃圾装卸整合处理。
3.公开号为cn113968441a的发明公开了一种分类自装卸垃圾站,包括至少两层的建筑,建筑内设有控制系统,还设有与控制系统连接的操作箱,以及设有与控制系统连接的升降机;建筑每层内均设置有与升降机连接的通道,并设有多个与通道对应连接的贮室,贮室内设有顶部开口的贮箱,还设有与通道连接的卸载室;建筑的外侧设有提升机,并设有与提升机功能对应衔接的破碎机;建筑内设有具有自动导航寻路功能的转运小车,转运小车上设有第一信号收发器,控制系统上设有第二信号收发器。该装置具有自动化程度高、垃圾的装存卸载速度快、运行成本低的优点。
4.但是上述技术方案存在以下缺陷:上述自装卸垃圾站通过设置多个与通道对应连接的贮室,利用提升机和破碎机将垃圾桶内的垃圾装卸至与贮室连通的通道内。首先上述垃圾站中贮室的清洁难以保证;其次利用转运小车进行导航寻路也导致了整体控制模块的成本增高,不利于该自动装卸垃圾站大范围普及,这就导致上述技术方案的实用性较低。
技术实现要素:
5.本发明针对背景技术中存在的技术问题,提出一种垃圾亭垃圾装卸智能调控装置。
6.本发明的技术方案:一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架、垃圾储存架、垃圾桶放置仓门、垃圾桶转运导轨、垃圾桶转运台、垃圾倾倒组件、垃圾储存仓和控制模块。
7.垃圾桶放置仓门设置在垃圾桶转运架上。垃圾桶转运导轨设置在垃圾桶转运架上。由垃圾桶转运导轨驱动的垃圾桶转运台滑动设置在垃圾桶转运架上;垃圾桶本体设置在垃圾桶转运台上。垃圾倾倒组件设置在垃圾桶转运架上。垃圾储存仓设置在垃圾储存架上,垃圾储存仓的垃圾进口位于垃圾倾倒组件的垃圾投放处。
8.优选的,还包括驱动气缸和垃圾挤压板;驱动气缸的缸体端设置在垃圾储存仓上,驱动气缸的活塞端设置在垃圾挤压板上;垃圾挤压板滑动设置在垃圾储存仓上。
9.优选的,垃圾储存仓上设置有垃圾进口和垃圾出口。
10.优选的,还包括垃圾倾倒定位轨;垃圾倾倒定位轨的一端设置在垃圾桶转运导轨
上,垃圾倾倒定位轨的另一端设置在垃圾储存仓上,垃圾倾倒定位轨的另一端位于垃圾进口处。
11.优选的,垃圾倾倒组件包括提升升降架、提升升降座、提升机械爪、限位升降架、限位升降座和限位辊;提升升降架设置在垃圾桶转运架上;提升升降座滑动设置在提升升降架上;提升机械爪设置在提升升降座上,提升机械爪位于垃圾桶本体的倾倒后侧;限位升降架设置在垃圾桶转运架上;限位升降座滑动设置在限位升降架上;限位辊转动设置在限位升降座上,限位辊位于垃圾桶本体的倾倒前侧。
12.优选的,垃圾倾倒组件还包括安装架、移动座、转动座、滑轮、连接件、悬挂块和弯钩;垃圾桶盖板上设置有盖板把手;安装架设置在垃圾桶转运架上;移动座滑动设置在安装架上;转动座设置在移动座上;滑轮转动设置在转动座上;连接件绕设在滑轮上;悬挂块设置在连接件靠近垃圾桶本体的一端;弯钩设置在悬挂块上;垃圾桶盖板上设置有盖板把手。
13.优选的,控制模块与垃圾桶转运导轨和垃圾倾倒组件通讯连接。
14.优选的,垃圾桶转运台上设置有垃圾桶卡槽。
15.一种垃圾亭垃圾装卸智能调控装置,该装置的运行方法如下:
16.s1、开启垃圾桶放置仓门,将盛满垃圾的垃圾桶本体放置在垃圾桶转运台上。
17.s2、垃圾桶转运导轨工作,带动垃圾桶转运台以及其上的垃圾桶本体在垃圾桶转运架内移动。
18.s3、当垃圾桶本体运动至垃圾储存仓的垃圾进口处时,垃圾倾倒组件启动,将垃圾桶本体内的垃圾倾倒至垃圾储存仓中。
19.s4、垃圾倾倒完毕后,垃圾倾倒组件复位,垃圾桶本体回到垃圾桶转运台上;垃圾桶转运台带动空的垃圾桶本体回到垃圾桶放置仓门处。
20.s5、驱动气缸带动垃圾挤压板对进入垃圾储存仓的垃圾进行推动挤压。
21.与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:本发明将垃圾转运的连接通道设置为最低,垃圾桶内的垃圾直接从垃圾桶本体内进入垃圾储存仓中,缓解了工作人员对垃圾转运装卸通道的清理工作。同时本发明利用控制模块对垃圾桶转运导轨和垃圾倾倒组件进行控制,提高了整体装置的智能自动化性能,工作人员只需要将垃圾桶本体固定在垃圾转运台上后,垃圾转运工作和挤压工作均依靠设备自动化完成,提高了垃圾转运装卸的工作效率。
附图说明
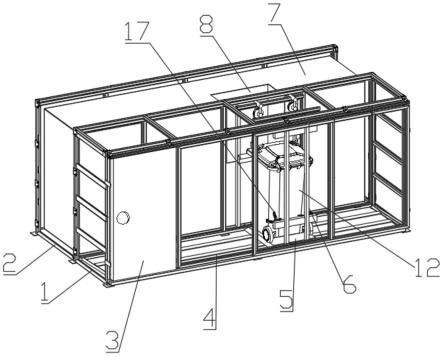
22.图1为本发明一种实施例的结构示意图。
23.图2为本发明一种实施例的透视图。
24.图3为本发明一种实施例中垃圾倾倒组件的结构示意图。
25.附图标记:1、垃圾桶转运架;2、垃圾储存架;3、垃圾桶放置仓门;4、垃圾桶转运导轨;5、垃圾桶转运台;6、垃圾倾倒组件;7、垃圾储存仓;8、垃圾进口;9、驱动气缸;10、垃圾挤压板;11、垃圾出口;12、垃圾桶本体;13、垃圾倾倒定位轨;14、垃圾桶卡槽;15、提升升降架;16、提升升降座;17、提升机械爪;18、限位升降架;19、限位升降座;20、限位辊;21、垃圾桶盖板;22、盖板把手;23、安装架;24、移动座;25、转动座;26、滑轮;27、连接件;28、悬挂块;29、弯钩。
具体实施方式
26.实施例一
27.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
28.如图1-2所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
29.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。本发明将垃圾转运的连接通道设置为最低,垃圾桶内的垃圾直接从垃圾桶本体12内进入垃圾储存仓7中,缓解了工作人员对垃圾转运装卸通道的清理工作。同时本发明利用控制模块对垃圾桶转运导轨4和垃圾倾倒组件6进行控制,提高了整体装置的智能自动化性能,工作人员只需要将垃圾桶本体12固定在垃圾转运台5上后,垃圾转运工作和挤压工作均依靠设备自动化完成,提高了垃圾转运装卸的工作效率。
30.实施例二
31.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
32.如图1-2所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
33.进一步的,还包括驱动气缸9和垃圾挤压板10;驱动气缸9的缸体端设置在垃圾储存仓7上,驱动气缸9的活塞端设置在垃圾挤压板10上;垃圾挤压板10滑动设置在垃圾储存仓7上。
34.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
35.实施例三
36.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
37.如图1-2所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
38.进一步的,垃圾储存仓7上设置有垃圾进口8和垃圾出口11。
39.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
40.实施例四
41.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
42.如图1-2所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
43.进一步的,还包括垃圾倾倒定位轨13;垃圾倾倒定位轨13的一端设置在垃圾桶转运导轨4上,垃圾倾倒定位轨13的另一端设置在垃圾储存仓7上,垃圾倾倒定位轨13的另一端位于垃圾进口8处;垃圾桶转运台5到达垃圾倾倒定位轨13后,垃圾桶转运导轨4停止,便于将垃圾桶本体12定位在垃圾储存仓7的垃圾进口8处。
44.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
45.实施例五
46.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
47.如图1-3所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置
在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
48.进一步的,垃圾倾倒组件6包括提升升降架15、提升升降座16、提升机械爪17、限位升降架18、限位升降座19和限位辊20;提升升降架15设置在垃圾桶转运架1上;提升升降座16滑动设置在提升升降架15上;提升机械爪17设置在提升升降座16上,提升机械爪17位于垃圾桶本体12的倾倒后侧;限位升降架18设置在垃圾桶转运架1上;限位升降座19滑动设置在限位升降架18上;限位辊20转动设置在限位升降座19上,限位辊20位于垃圾桶本体12的倾倒前侧。提升升降座16带动提升升降爪17抓住垃圾桶本体12的下端;垃圾桶本体12的上端开口抵靠在限位辊20上,从而实现垃圾桶12的垃圾倾倒。设置限位升降座19,便于对不同高度的垃圾桶本体12进行限位。
49.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
50.实施例六
51.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
52.如图1-3所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
53.进一步的,垃圾倾倒组件6包括提升升降架15、提升升降座16、提升机械爪17、限位升降架18、限位升降座19和限位辊20;提升升降架15设置在垃圾桶转运架1上;提升升降座16滑动设置在提升升降架15上;提升机械爪17设置在提升升降座16上,提升机械爪17位于垃圾桶本体12的倾倒后侧;限位升降架18设置在垃圾桶转运架1上;限位升降座19滑动设置在限位升降架18上;限位辊20转动设置在限位升降座19上,限位辊20位于垃圾桶本体12的倾倒前侧。
54.进一步的,垃圾倾倒组件6还包括安装架23、移动座24、转动座25、滑轮26、连接件27、悬挂块28和弯钩29;垃圾桶盖板21上设置有盖板把手22;安装架23设置在垃圾桶转运架1上;移动座24滑动设置在安装架23上;转动座25设置在移动座24上;滑轮26转动设置在转动座25上;连接件27绕设在滑轮26上;悬挂块28设置在连接件27靠近垃圾桶本体12的一端;弯钩29设置在悬挂块28上;垃圾桶盖板21上设置有盖板把手22;设置移动座24,带动转动座25上的滑轮26以及弯钩29对盖板把手22进行定位,从而便于利用弯钩29勾住盖板把手22,
随后滑轮26控制连接件27收缩,进而打开垃圾桶本体12的盖板21。
55.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
56.实施例七
57.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
58.如图1-3所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
59.进一步的,控制模块与垃圾桶转运导轨4和垃圾倾倒组件6通讯连接。
60.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
61.实施例八
62.本实施例提出的一种垃圾亭垃圾装卸智能调控装置,包括垃圾桶转运架1、垃圾储存架2、垃圾桶放置仓门3、垃圾桶转运导轨4、垃圾桶转运台5、垃圾倾倒组件6、垃圾储存仓7和控制模块。
63.如图1-3所示,垃圾桶放置仓门3设置在垃圾桶转运架1上。垃圾桶转运导轨4设置在垃圾桶转运架1上。由垃圾桶转运导轨4驱动的垃圾桶转运台5滑动设置在垃圾桶转运架1上;垃圾桶本体12设置在垃圾桶转运台5上。垃圾倾倒组件6设置在垃圾桶转运架1上。垃圾储存仓7设置在垃圾储存架2上,垃圾储存仓7的垃圾进口8位于垃圾倾倒组件6的垃圾投放处。
64.进一步的,垃圾桶转运台5上设置有垃圾桶卡槽14。
65.在本实施例中,开启垃圾桶放置仓门3,将盛满垃圾的垃圾桶本体12放置在垃圾桶转运台5上。垃圾桶转运导轨4工作,带动垃圾桶转运台5以及其上的垃圾桶本体12在垃圾桶转运架1内移动。当垃圾桶本体12运动至垃圾储存仓7的垃圾进口8处时,垃圾倾倒组件6启动,将垃圾桶本体12内的垃圾倾倒至垃圾储存仓7中。垃圾倾倒完毕后,垃圾倾倒组件6复位,垃圾桶本体12回到垃圾桶转运台5上;垃圾桶转运台5带动空的垃圾桶本体12回到垃圾桶放置仓门3处。驱动气缸9带动垃圾挤压板10对进入垃圾储存仓7的垃圾进行推动挤压。
66.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1