一种调节火箭起竖与回平速度的控制系统的制作方法
1.本发明涉及火箭控制技术领域,尤其涉及一种调节火箭起竖与回平速度的控制系统。
背景技术:
2.在全球商业航天发展迅速的行业大背景下,民营商业火箭企业将迎来新的发展高潮。国内运载火箭的陆基发射常采用三平一垂的模式,即运载火箭整体水平运输到发射工位,在发射场进行火箭起竖与发射。火箭起竖装置一般采用围绕回转轴纵向翻转箭体,使箭体由水平运输的姿态转换为垂直发射状态。火箭起竖装置的举升动力普遍采用了多级液压油缸的驱动方式。
3.竖液压油缸的动力来源于液压系统,通过液压控制阀控制液压油缸的运动方向。由于运载火箭的重量一般在几十吨左右,高度在十几米到几十米,采用液压油缸进行火箭起竖动作时,液压油缸的输出推力大,液压油缸的运动行程长。液压油缸在运动过程可能存在爬行、推力不足、振动和失速等问题,因此对控制液压油缸动作的液压系统的性能和精度有较高的要求,要保证速度平稳和停靠准确。
4.多级液压油缸工作行程可以很长,不工作时可以缩得较短,有效的缩减了设备需要的安装空间。多级液压油缸由两级或多级活塞缸套装而成,由于不同级活塞的缸径和杆径都不相同,多级液压油缸伸出的时候,先推动有效作用面积较大的一级活塞运动,然后推动较小的二级活塞运动。因为进入的流量不变,根据v=q/a(v为速度,q为流量,s为横截面积)故有效作用面积大的活塞运动速度低而推力大,反之运动速度高而推力小。同理,多级液压油缸缩回的过程中,则二级活塞先退回至终点,然后一级活塞才退回,速度由快倒慢。不同级活塞切换的过程中,存在换级冲击和抖动失稳的问题。
5.火箭起竖过程中,为保证起竖过程动作平稳,起竖过程中设置2到3个个减速位置点,在换级之前进行减速,在起竖到位之前至少减速一次,保证平稳起竖到竖直状态。一般国内火箭起竖液压系统的主要采用节流调速的方式,采用定量泵供油,由流量控制阀改变流入和流出执行元件的流量以调节速度,这种系统称阀控系统。采用节流调速系统会造成大量损耗,系统发热严重,导致液压系统温度很快上升,系统容积效率降低,导致系统总效率降低。
技术实现要素:
6.本发明提供了一种调节火箭起竖与回平速度的控制系统,包括机械部分和液压控制部分;
7.机械部分包括起竖支撑(11)、起竖架(12)、起竖摇臂(13)和液压油缸(14);起竖支撑(11)固定在地面上,起竖支撑(11)为起竖摇臂(13)回转点提供支撑,并在箭体起竖和放平时为起竖架(12)、起竖摇臂(13)和液压油缸(14)提供支撑;起竖架(12)用来装载运载火箭,通过销轴与搭接的方式与起竖摇臂(13)连接;起竖摇臂(13)位于起竖支撑(11)上,连接
多级液压油缸(14)和起竖支撑(11);多级液压油缸(14)包括液压油缸本体(141)和闭锁阀组(142),闭锁阀组(142)确保液压油缸(14)无动力时在任意位置的闭锁;
8.液压控制部分包括控制多级液压油缸的液压控制动力源,液压控制动力源包括液压泵电机组(21)、安全阀组(22)、电磁换向阀(23)和电磁球阀(24);液压泵电机组(21)连接对应的安全阀组(22),在安全阀组(22)与每个多级液压油缸(14)的连接油路之间分别设置电磁换向阀(23)和电磁球阀(24);电磁换向阀(23)用于控制液压油的流向以控制液压油缸(14)的伸出和缩回;电池球阀(24)控制闭锁阀组(142)和多级液压油缸(14)的闭锁。
9.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,起竖摇臂(13)设置为两组,起竖摇臂(13)分别在起竖架(12)左右两端各设置一个,两组起竖摇臂(13)设计呈梯形桁架结构,位于起竖支撑(11)上,用于连接多级液压油缸(14)与起竖支撑(11)。
10.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,多级液压油缸(14)设置为四个,位于起竖架(12)左右的起竖摇臂(13)分别连接两个多级液压油缸(14)。
11.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,液压油缸本体(141)包括缸筒(1411),缸筒(1411)内套接一级活塞杆(1412),一级活塞杆(1412)内套接二级活塞杆(1413),通过液压油缸多级活塞杆的伸出和缩回控制推动运载火箭的竖起和放平。
12.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,多级液压油缸(14)设置为四个,位于起竖架(12)左右的起竖摇臂(13)分别连接两个多级液压油缸(14)。
13.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,在每个液压油缸上均设置拉线位移传感器(147),实时检测显示液压缸行程,检测四个液压油缸运行状态,拉线位移传感器(147)反馈的四个液压油缸行程偏差不大于预设范围时,则火箭能够正常运行,若偏差超出上述范围,则停止动作。
14.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,当电磁换向阀(23)右侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压油缸无杆腔(145),当电磁换向阀(23)左侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压缸有杆腔(146)。
15.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,当电磁球阀(24)未得电时,闭锁阀组(142)处于关闭状态,多级液压油缸(14)处于闭锁状态,无法运动,当电磁球阀(24)得电后,打开闭锁阀组(142),液压油缸(14)可以运动。
16.如上所述的一种调节火箭起竖与回平速度的控制系统,其中,液压泵电机组(21)采用三套热备份,每套液压泵电机组(21)设置有三台液压泵;安全阀组(22)设置三组,保护对应的液压泵电机组(21)。
17.本发明实现的有益效果如下:本发明通过多个比例流量控制变量液压泵配合使用的方法,实现多级液压油缸不同级伸出速度一致,解决了换级冲击的问题;设备冗余设计,采用三套液压泵电机组热备份,其中一套无法正常工作,单台故障不影响动作,只是起竖动作时间变长,提供一套速度平稳、停靠准确和输出稳定的液压系统,实现火箭的平稳的起竖和回平。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
19.图1为本发明实施例提供的一种火箭起竖与放平过程中速度控制与自动调节的系统的火箭起竖状态示意图;
20.图2为本发明实施例提供的一种火箭起竖与放平过程中速度控制与自动调节的系统的火箭水平状态示意图;
21.图3~5为液压油缸不同状态示意图;
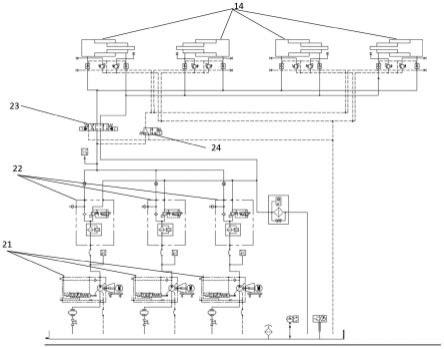
22.图6为液压控制动力源示意图;
23.图7为液压控制部分工作原理图。
24.附图标记:
25.11-起竖支撑;12-起竖架;13-起竖摇臂;14-液压油缸;15-角度传感器;131-起竖摇臂上支点;132-起竖摇臂下支点;141-液压油缸本体;142-闭锁阀组;143-前端关节轴承;144-尾端关节轴承;145-液压油缸无杆腔;146-液压油缸有杆腔;147-拉线位移传感器;1411-缸筒;1412-一级活塞杆;1413-二级活塞杆;
26.21-液压泵电机组;22-安全阀组;23-电磁换向阀;24-电磁球阀。
具体实施方式
27.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.实施例一
29.图1为火箭起竖状态示意图,图2为火箭水平状态示意图。参见图1~2,本发明实施例一提供一种调节火箭起竖与回平速度的控制系统,包括机械部分和液压控制部分。
30.(一)机械部分是实现火箭起竖的设备,包括起竖支撑11、起竖架12、起竖摇臂13和液压油缸14;起竖支撑11固定在地面上,起竖支撑11为起竖摇臂13回转点提供支撑,并在箭体起竖和放平时为起竖架12、起竖摇臂13和液压油缸14提供支撑;起竖架12用来装载运载火箭,通过销轴与搭接的方式与起竖摇臂13连接;起竖摇臂13位于起竖支撑11上,连接多级液压油缸14和起竖支撑11;多级液压油缸14包括液压油缸本体141和闭锁阀组142,闭锁阀组142确保油缸无动力时在任意位置的闭锁;
31.具体地,起竖支撑11固定在发射场坪地面上,在起竖架12对接发射台时提供转载支撑,为起竖摇臂13回转点提供支撑,并在箭体起竖和后倒时为起竖架12、起竖摇臂13和液压油缸14提供支撑。
32.起竖架12用来装载运载火箭,是运载火箭箭体接口、末修保温、四级脱插、空调供气管路的安装支撑结构,设计用来箭体装载、转场运输、发射台对接、起竖期间作为载荷的主要受力部件,通过销轴与搭接的方式与起竖摇臂13连接。
33.起竖摇臂13设置为两组,两组起竖摇臂设计呈梯形桁架结构,位于起竖支撑11上,用于连接多级液压油缸14与起竖支撑11。起竖摇臂13分别在起竖架12左右两端各设置一个,将起竖过程中所需要的力进行了分散,单个起竖摇臂13分别连接两个多级液压油缸14,
减少了单个多级液压油缸需要输出的力。
34.参见图3~5,在起竖摇臂13与起竖支撑11连接位置还设置角度传感器15。
35.液压油缸14在本系统为多级液压油缸,用于为火箭起竖提供动力。多级液压油缸包括液压油缸本体141和闭锁阀组142;液压油缸本体141包括缸筒1411,缸筒1411内套接一级活塞杆1412,一级活塞杆1412内套接二级活塞杆1413,通过液压油缸多级活塞杆的伸出和缩回控制推动运载火箭的竖起和放平;在缸筒141上端设置闭锁阀组142,可以确保油缸无动力时在任意位置的闭锁,防止因为重力原因出现下滑。
36.当多级液压油缸活塞杆全部缩回(参见图3)时,运载火箭将处于水平状态,多用于运输运载的过程,当多级液压油缸活塞杆全部伸出(参见图1)时,运载火箭处于垂直竖立状态,满足运载火箭发射需求。多级液压油缸的两端分别设置关节轴承,前端关节轴承143与起竖摇臂上支点131连接,尾端关节轴承144与起竖支撑下支点132连接。
37.本技术的多级液压油缸由两级活塞缸套装而成,由于两级活塞的缸径和杆径都不相同,因此在多级液压油缸伸出时,先推动有效作用面积较大的一级活塞运动,然后推动有效作用面积较小的二级活塞运动。在进入的流量不变的情况下,根据v=q/a(v为速度,q为流量,s为横截面积)故有效作用面积大的活塞运动速度低而推力大,反之运动速度高而推力小。即流量相同的情况下,一级活塞运动速度慢,二级活塞运动速度快,要避免换级冲击,对应一级活塞和二级活塞需要提供对应不同流量的液压油。
38.本技术的多级液压油缸14设置为四个,位于起竖架12左右的起竖摇臂13分别连接两个多级液压油缸14。液压油缸无杆腔145连接第一油口和第二油口,第一油口连接安装在左侧的2个多级液压油缸,第二油口连接安装在右侧的2个多级液压油缸。液压油缸有杆腔146的油口连接第三油口和第四油口,第三油口连接安装在左侧的2个多级液压油缸,第四油口连接安装在右侧的2个多级液压油缸。
39.另外,在每个液压油缸上均设置拉线位移传感器147,能够实时检测显示液压缸行程,检测四个液压油缸运行状态,拉线位移传感器147反馈的四个液压油缸行程偏差不大于预设范围(如
±
10mm)时,则火箭能够正常运行,若偏差超出上述范围,则停止动作,检查液压系统。
40.(二)参见图6~7,液压控制部分包括控制四个多级液压油缸的液压控制动力源,液压控制动力源将所有液压元件安装在液压油箱上,简化了液压系统的设计和安装,实现液压控制系统的集成化和标准化,液压控制动力源安装固定在起竖支撑11上。
41.液压控制动力源包括液压泵电机组21、安全阀组22、电磁换向阀23和电磁球阀24。液压泵电机组21连接对应的安全阀组22,在安全阀组22与每个多级液压油缸14的连接油路之间分别设置电磁换向阀23和电磁球阀24;电磁换向阀23用于控制液压油的流向以控制液压油缸14的伸出和缩回,当电磁换向阀23右侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压油缸无杆腔145,当电磁换向阀23左侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压缸有杆腔146;电池球阀24控制闭锁阀组142和多级液压油缸14的闭锁,当电磁球阀24未得电时,闭锁阀组142处于关闭状态,多级液压油缸14处于闭锁状态,无法运动,当电磁球阀24得电后,打开闭锁阀组142,液压油缸14可以运动。
42.具体地,本技术的液压泵电机组21设置有三台液压泵,液压泵的控制方式采用比例流量控制,通过输入不同的电信号可以控制液压泵输出对应不同的液压流量。优选地,三
台液压泵为变量柱塞泵,三台变量柱塞泵将电能转换成高压油液。在液压泵电机组出口安装有流量计,显示每一个液压泵的流量。
43.本技术实施例中,液压泵电机组21采用三套热备份,其中一套无法正常工作,单台故障不影响动作,只是起竖动作时间变长。
44.安全阀组22用于设定系统最高的工作压力,保护液压系统的液压元件。本技术优选设置三组安全阀组,对应保护三台液压泵。
45.电磁换向阀23用于控制液压油的流向以控制液压油缸14的伸出和缩回。电磁换向阀23采用板式安装,为三位四通换向阀,设置两块电磁铁y01和y02,当电磁换向阀23右侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压油缸无杆腔145;当电磁换向阀23左侧电磁铁得电时,高压液压油从液压泵经电磁流向多级液压缸有杆腔146。
46.电磁球阀24是以电磁铁的推力为驱动力推动钢球来实现油路通断的电磁换向阀。当电磁铁的推力驱动钢球到达电磁球阀24一端时,闭锁阀组142处于关闭状态,多级液压油缸14处于闭锁状态,无法运动;当电磁球阀24得电后,打开闭锁阀组142,液压油缸14可以运动。
47.本系统的工作原理:
48.火箭起竖的过程对应多级液压油缸伸出的过程:首先启动液压泵电机组21的其中1个(输出额定流量),液压系统开始正常工作,启动系统;电磁球阀24得电,打开液压油缸闭锁阀组142,解锁多级液压缸14,解锁油缸;电磁换向阀23右侧得电,高压油流向多级液压油缸无杆腔145,液压油缸开始伸出,此时运载火箭开始慢速起竖;当多级液压油缸的拉线位移传感器147反馈液压油缸开始伸出后,再打开1个液压泵电机组(输出额定流量),此时2个液压泵电机组同时工作,此时运载火箭开始快速起竖;当多级液压油缸的拉线位移传感器147反馈液压油缸一级活塞杆1412快要完全伸出后,关闭1个液压泵电机组,改为1个液压泵电机组工作,起竖过程开始换级前减速,避免出现换级冲击;当多级液压油缸的拉线位移传感器147反馈液压油缸一级活塞杆1412已经完全伸出,液压油缸二级活塞杆1413已经开始伸出,再打开1个液压泵电机组(输出额定流量),此时2个液压泵电机组同时工作,起竖过程开始换级后快速起竖;当多级液压油缸的拉线位移传感器147反馈液压油缸伸出到全行程80%时,关闭其中1个液压泵电机组,开始减速。当多级液压油缸的拉线位移传感器147反馈液压油缸伸出到全行程90%时,降低剩余工作的1个液压泵电机组输入控制电流信号,降低液压系统的输出流量,液压系统流量降低到最低,此时起竖过程为二级减速(最终减速)。多级液压油缸的拉线位移传感器147反馈液压油缸起竖到位,关闭电磁球阀24将油缸闭锁,关闭液压泵电机组,关闭电磁换向阀23。
49.火箭回平过程对应多级液压油缸缩回的过程,与以上过程相似。分为慢速启动回平、加速回平,减速过换级,换级后加速,减速回平到位,回平到位关闭输出。火箭回平过程中为了防止速度过快产生失速和冲击的问题,只启动一个液压泵电机组,通过调节液压泵电机组的输入电流来调节运载火箭的回平速度。
50.采用本技术技术方案能够达到如下技术效果:
51.(1)采用多个泵电机组配合使用的方法,实现多级液压油缸不同级伸出速度一致,解决了换级冲击的问题。
52.(2)采用一个可调变量液压泵控制多级缸的缩回,比例流量控制变量液压泵可按
照比例实现液压油流量的供给,实现不同级活塞的缩回速度一致。
53.(3)液压油缸安装拉线位移传感器,监控液压液压油缸的伸出缩回状态,配合液压泵使用。
54.(4)设备冗余设计,采用三套液压泵电机组热备份,其中一套无法正常工作,单台故障不影响动作,只是起竖动作时间变长。
55.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的技术方案的基础之上,所做的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1