一种具有精准投放功能的脱钩器的制作方法
1.本发明涉及机械领域,具体涉及一种具有精准投放功能的脱钩器。
背景技术:
2.目前,资源开发由传统陆地开采向海洋挺进,海洋油气开发和海底热液矿区均已经成为油气和矿产开发的重点研究领域,海上作业也随之愈加精密和专业化。海洋勘探和开发活动中,设备的吊放与回收工作最为频繁。相比于传统人工吊放,脱钩器在面对海上作业恶劣环境上,能够提高作业人员的安全系数并简化操作。现有应用于海上吊放作业的脱钩器,普遍智能化程度较低,一般是通过操作手动机械开关或近程遥控控制实现设备脱钩投放,并且在行船状态下或海下投放时,由于设备处于随动状态,脱钩后设备会由于之前随动的惯性以及海风、海流等环境因素,导致落点的准确性和精确度不理想。
技术实现要素:
3.本发明要解决的技术问题是:克服现有脱钩器控制方式智能化程度低、脱钩设备落点精准度差的缺陷,提供一种具有精准投放功能的脱钩器,其通过采集设备所处行船状态或海下投放的状态、环境参数上传,为根据预设投放落点位置进行投放时间提前或延后的误差补偿提供必要的功能硬件,从而使精确投放成为可能,同时可在预设投放坐标的自动控制和船上手动遥控器之间切换,增强了脱钩控制的灵活性;本脱钩器还优化了脱钩器的内部驱动结构,将传统脱钩器钩体旋转驱动转化为通过丝杠-连接臂传动的直线行程驱动方式,在简化钩体开合控制、提高了开合状态稳定性的同时,提高了驱动部件的耐用性。
4.本具有精准投放功能的脱钩器包括外壳,以及设置在外壳前端的钩体、设置在外壳内部的驱动机构,其中,所述外壳后部一侧设有控制盒,所述控制盒内部设有控制机构,控制盒外部设有定位机构,所述控制机构输入端串行连接定位机构,控制机构输出端电性连接驱动机构,所述驱动机构机械与所述钩体机械传动连接;所述控制机构包括主控板,集成在该主控板上的单片机处理器、无线收发模块、脉冲信号接收电路模块、通道开关模块、存储模块、电源转换模块;所述定位机构包括gps定位器、速度传感器、海流计和雷达位置传感器。
5.具体到控制机构内部功能元件,及与定位机构和驱动机构的通信及控制连接关系,所述gps定位器、速度传感器、海流计和雷达位置传感器通过串口总线与单片机处理器连接,所述单片机处理器通过txd/rxd管脚组与所述无线收发模块、存储模块连接,单片机处理器输入端与所述脉冲信号接收电路模块连接,单片机处理器输出端与所述通道开关模块控制端连接,所述无线收发模块、脉冲信号接收电路模块分别与通道开关模块输入端连接,通道开关模块输出端连接所述驱动机构。
6.具体到功能元件型号选择,所述单片机处理器采用stm32f系列103c8t6芯片,所述无线收发模块采用lora无线通信形式的sx1278 433mhz射频数传模块,所述脉冲信号接收电路模块采用集成的rx-tp-l4脉冲信号接收集成电路模块,所述通道开关模块采用ad9854
多通道dds切换模块;所述gps定位器采用sps855海洋定位器,所述速度传感器采用wtgahrs3六轴惯性速度传感器,海流计采用bes
‑‑
psc30f-s04流速流向传感器,雷达位置传感器采用tof-n10深水级雷达探头。
7.具体到驱动机构的部件组成,所述驱动机构按动力输出顺序依次包括伺服电机、曲杆、驱动丝母、驱动杆和一对传动臂,所述伺服电机的伺服驱动器与所述通道开关模块的输出端信号连接,所述传动臂与所述钩体上端枢轴连接。
8.具体到驱动机构的部件连接关系,所述外壳内部设有支撑板和一对销轴,所述支撑板下方设有一对导向轨,支撑板上于两导向轨之间的位置开设有过孔,该过孔内固定连接有一中转轴承,所述驱动丝母固定于中转轴承内圈上,中转轴承外圈固定在支撑板中央的过孔内壁上。
9.进一步的,所述驱动杆下部呈方柱状并滑配于所述导向轨内,驱动杆上部呈圆柱状并设有丝部,驱动杆上部的丝部段丝接于所述驱动丝母内,所述钩体转动连接在所述销轴上。
10.进一步的,所述驱动丝母通过曲杆与所述伺服电机固定连接。
11.具体到驱动机构与钩体之间的传动方式,所述钩体上端设有连接耳,所述传动臂内侧端分别铰接在所述驱动杆下端两侧,传动臂内侧端分别铰接在两钩体上端的连接耳上。
12.本发明一种具有精准投放功能的脱钩器,克服了现有脱钩器控制方式智能化程度低、脱钩设备落点精准度差的缺陷,提供一种具有精准投放功能的脱钩器,其通过采集设备所处行船状态或海下投放的状态、环境参数上传,为根据预设投放落点位置进行投放时间提前或延后的误差补偿提供必要的功能硬件,从而使精确投放成为可能,同时可在预设投放坐标的自动控制和船上手动遥控器之间切换,增强了脱钩控制的灵活性;本脱钩器还优化了脱钩器的内部驱动结构,将传统脱钩器钩体旋转驱动转化为通过丝杠-连接臂传动的直线行程驱动方式,在简化钩体开合控制、提高了开合状态稳定性的同时,提高了驱动部件的耐用性。
附图说明
13.下面结合附图对本发明一种具有精准投放功能的脱钩器作进一步说明:
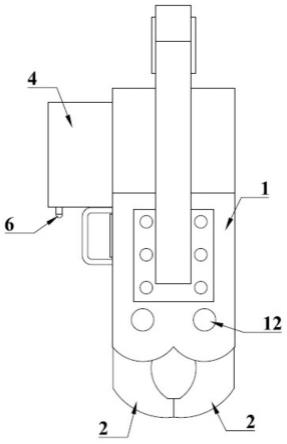
14.图1是本具有精准投放功能的脱钩器的主视平面结构示意图;
15.图2是本具有精准投放功能的脱钩器的主视平面结构示意图;
16.图3是本具有精准投放功能的脱钩器所述驱动机构示意图(钩体闭合状态-吊装状态);
17.图4是本具有精准投放功能的脱钩器所述驱动机构示意图(钩体张开状态-脱钩投放状态)
18.图5是本具有精准投放功能的脱钩器所述控制机构的逻辑架构及功能元件连接线框图。
19.图中:
20.1-外壳;11-支撑板、12-销轴、13-导向轨;131-中转轴承;
21.2-钩体;21-连接耳;
22.3-驱动机构;31-伺服电机、32-曲杆、33-驱动丝母、34-驱动杆、35-传动臂
23.4-控制盒;
24.5-控制机构;51-主控板、52-单片机处理器、53-无线收发模块、54-脉冲信号接收电路模块、55-通道开关模块、56-存储模块、57-电源转换模块;
25.6-定位机构;61-gps定位器、62-速度传感器、63-海流计、64-雷达位置传感器。
具体实施方式
26.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
27.在本发明的描述中,需要理解的是,术语“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置关系均为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.以下用具体实施例对本发明技术方案做进一步描述,但本发明的保护范围不限制于下列实施例。
29.实施方式1:如图1、2、5所示,本具有精准投放功能的脱钩器包括外壳1,以及设置在外壳1前端的钩体2、设置在外壳1内部的驱动机构3,其中,所述外壳1后部一侧设有控制盒4,所述控制盒4内部设有控制机构5,控制盒4外部设有定位机构6,所述控制机构5输入端串行连接定位机构6,控制机构5输出端电性连接驱动机构3,所述驱动机构机械与所述钩体2机械传动连接;所述控制机构5包括主控板51,集成在该主控板51上的单片机处理器52、无线收发模块53、脉冲信号接收电路模块54、通道开关模块55、存储模块56、电源转换模块57;所述定位机构6包括gps定位器61、速度传感器62、海流计63和雷达位置传感器64。具体到功能元件型号选择,所述单片机处理器52采用stm32f系列103c8t6芯片,所述无线收发模块53采用lora无线通信形式的sx1278 433mhz射频数传模块,所述脉冲信号接收电路模块54采用集成的rx-tp-l4脉冲信号接收集成电路模块,所述通道开关模块55采用ad9854多通道dds切换模块;所述gps定位器61采用sps855海洋定位器,所述速度传感器62采用wtgahrs3六轴惯性速度传感器,海流计63采用bes
‑‑
psc30f-s04流速流向传感器,雷达位置传感器64采用tof-n10深水级雷达探头。gps定位器、速度传感器分别用于采集行船位置、速度和方向,海流计、雷达位置传感器分别用于采集脱钩位置海流方向、流速以及吊装设备相对位置,采集信息发送至单片机处理器,通过无线收发模块向远程控制端发送,或通过储存模块搭载补偿运算软件,直接载入单片机处理器中进行释放时差值运算,将处理后理想状态释放时间
±
补偿释放时间差值的开钩控指令信号经通道开关模块向驱动电机的伺服控制器发送,从而实现精确投放;当需要主动控制时,脉冲信号接收电路模块可接收遥控信号,并通过经通道开关模块向驱动电机的伺服控制器发送即时控制指令信号,从而实现手动控制。
30.实施方式2:如图5所示,本具有精准投放功能的脱钩器所述gps定位器61、速度传
感器62、海流计63和雷达位置传感器64通过串口总线与单片机处理器52连接,所述单片机处理器52通过txd/rxd管脚组与所述无线收发模块53、存储模块56连接,单片机处理器52输入端与所述脉冲信号接收电路模块54连接,单片机处理器52输出端与所述通道开关模块55控制端连接,所述无线收发模块53、脉冲信号接收电路模块54分别与通道开关模块55输入端连接,通道开关模块55输出端连接所述驱动机构3。定位机构各采集器件通过串口向控制机构发送数据信号,单片机处理器根据采集数据计算投放时间差,并将投放指令信号向伺服驱动器发送,以控制电机转速的方式,来补偿修正钩体理想状态下张开过程的时间;通道开关模块日常向外输出无线数传模块的信号,以根据远程接收的投放位置坐标进行自动投放,当脉冲信号接收电路模块收到遥控器遥控信号后,向单片机处理器发送电平信号,单片机处理器控制通道开关模块切换,向外输出脉冲信号接收电路模块的输入信号。其余结构和部件如实施方式1所述,不再重复描述。
31.实施方式3:如图3、4所示,所述驱动机构3按动力输出顺序依次包括伺服电机31、曲杆32、驱动丝母33、驱动杆34和一对传动臂35,所述伺服电机31的伺服驱动器与所述通道开关模块55的输出端信号连接,所述传动臂35与所述钩体2上端枢轴连接。其余结构和部件如实施方式1或2所述,不再重复描述。相对于传统脱钩器通过直接钩体旋转的方式,本脱钩器通过伺服电机输出轴和曲柄驱动丝母转动,带动驱动杆上下直线行程,再通过连接臂带动连接耳,传动至钩体开合,钩体驱动部件单一、原理简单,钩体开合状态易于控制且张开度能够稳定和维持,丝杠和连接臂传动使驱动机构的耐用性得到了提升。
32.实施方式4:如图3、4所示,所述外壳1内部设有支撑板11和一对销轴12,所述支撑板11下方设有一对导向轨13,支撑板11上于两导向轨13之间的位置开设有过孔,该过孔内固定连接有一中转轴承131,所述驱动丝母33固定于中转轴承131内圈上,中转轴承131外圈固定在支撑板11中央的过孔内壁上。所述驱动杆34下部呈方柱状并滑配于所述导向轨13内,驱动杆34上部呈圆柱状并设有丝部,驱动杆34上部的丝部段丝接于所述驱动丝母33内,所述钩体2转动连接在所述销轴12上。所述驱动丝母33通过曲杆32与所述伺服电机31固定连接。所述钩体2上端设有连接耳21,所述传动臂35内侧端分别铰接在所述驱动杆34下端两侧,传动臂35内侧端分别铰接在两钩体21上端的连接耳上。其余结构和部件如实施方式3所述,不再重复描述。
33.本具有精准投放功能的脱钩器克服了现有脱钩器控制方式智能化程度低、脱钩设备落点精准度差的缺陷,提供一种具有精准投放功能的脱钩器,其通过采集设备所处行船状态或海下投放的状态、环境参数上传,为根据预设投放落点位置进行投放时间提前或延后的误差补偿提供必要的功能硬件,从而使精确投放成为可能,同时可在预设投放坐标的自动控制和船上手动遥控器之间切换,增强了脱钩控制的灵活性;本脱钩器还优化了脱钩器的内部驱动结构,将传统脱钩器钩体旋转驱动转化为通过丝杠-连接臂传动的直线行程驱动方式,在简化钩体开合控制、提高了开合状态稳定性的同时,提高了驱动部件的耐用性。
34.以上描述显示了本发明的主要特征、基本原理,以及本发明的优点。对于本领域技术人员而言,显然本发明不限于上述示范性实施方式或者实施例的细节,且在不背离本发明的精神或者基本特征的情况下,能够以其他的具体形式实现本发明。因此应将上述实施方式或者实施例看作示范性的,且非限制性的。本发明的范围由所附权利要求而非上述说
明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1