一种塑料制品生产用自动搬运设备的制作方法
1.本发明涉及自动搬运技术领域,具体为一种塑料制品生产用自动搬运设备。
背景技术:
2.由于塑料制品工艺繁琐,所以需要搬运设备来将塑料制品运输到下一处进行下一步的加工,由于人力成本的不断提高,现今自动导引运输车(agv)系统已经在生产物流系统中得到很广的应用,成为现代化企业自动化生产不可缺少的部分。在我国,agv在物流和工业生产领域都有应用,agv搬运机器人的导航和自动化控制是agv搬运机器人的重要部分,如授权公告号为cn108502051b的智能agv搬运机器人,解决的是如何实现agv搬运机器人的移动目的性和精准性问题,这也是agv搬运机器人的重点研发方向。要采用agv搬运机器人实现物品的位置转移,不可避免需要进行物品的装卸。若采用人工进行物品装卸,一方面增加了人工成本,另一方面不利于生产自动化规划;若采用机械设备进行物品装卸,有的是独立的装卸设备,成本较高,有的agv搬运机器人集成有装卸机构。
3.目前,agv搬运机器人上的装载结构位于agv搬运机器人的表面,其占据了大量的装载空间,不利于大型塑料件的搬运工作,大型件由于其自重较大载搬运中受装载结构装夹后其重心靠近或偏离agv搬运机器人导致车体移动轮发生打滑甚至导致agv搬运机器人的倾覆,无法稳定进行大型件的搬运工作,存在一定缺陷。
4.有鉴于此,针对现有的问题予以研究改良,提供一种塑料制品生产用自动搬运设备,来解决目前存在的agv搬运机器人与装载结构配合装载重心偏移以及无法进行大型件稳定搬运的问题,旨在通过该技术,达到解决问题与提高实用价值性的目的。
技术实现要素:
5.本发明旨在解决现有技术或相关技术中存在的技术问题之一。
6.为此,本发明所采用的技术方案为:一种塑料制品生产用自动搬运设备,包括:移动车身、装载夹头、搬运力臂和拾取机构,所述移动车身底面的两端分别活动安装有辅助支撑轮和驱动轮,所述移动车身的表面固定安装有驱动轮,所述搬运力臂的一端转动安装于偏转座的表面且转轴处套接有主动轮盘,所述主动轮盘的表面传动连接有固定于移动车身表面的电动机,所述移动车身的内部设有独立电源和控制器;所述装载夹头包括夹头座、驱动座、滚转夹头以及固定于滚转夹头内侧的配重锤头,所述夹头座的一端固定安装于驱动座的表面,所述驱动座的一端于滚转夹头的端部固定连接,所述拾取机构转动安装于滚转夹头的另一端,所述驱动座的表面固定安装有驱动电机,所述拾取机构包括主转杆和固定安装于主转杆两端的滚转夹轮,所述主转杆的表面设有皮带轮,所述滚转夹头的表面转动安装有与驱动电机和皮带轮传动连接的传动轮轴。
7.本发明在一较佳示例中可以进一步配置为:所述驱动轮为三角形履带轮结构,所述辅助支撑轮为万向支撑轮结构,所述驱动轮的内侧设有驱动马达,所述驱动轮的内侧设有偏转舵机,所述偏转舵机的输出端与移动车身的表面固定连接。
8.本发明在一较佳示例中可以进一步配置为:所述移动车身的表面嵌入安装有位于辅助支撑轮一侧和移动车身顶面的移动监测摄像头和装载监测摄像头,所述移动监测摄像头和装载监测摄像头呈90
°
夹角布置,所述移动车身的输入端电信号连接有远程控制器,所述远程控制器表面集成有用于接收移动监测摄像头和装载监测摄像头数据信号的图像显示模块。
9.本发明在一较佳示例中可以进一步配置为:所述搬运力臂包括主转臂、伸缩套臂以及位于伸缩套臂内侧的驱动杆,所述主转臂的一端滑动套接于主转臂的一端,所述伸缩套臂的两端分别与伸缩套臂的内侧和主转臂的表面固定连接,所述伸缩套臂的外侧与驱动座的内侧固定连接。
10.本发明在一较佳示例中可以进一步配置为:所述滚转夹头的一端固定安装有轴承座,所述主转杆转动套接于轴承座的内侧,所述皮带轮、传动轮轴和驱动电机的输出端套接有用于传动连接的传动皮带。
11.本发明在一较佳示例中可以进一步配置为:所述夹头座呈弧形弯曲状,所述夹头座和滚转夹头连接组合呈c字形结构。
12.本发明在一较佳示例中可以进一步配置为:所述夹头座的数量为两个且两个夹头座之间设有连杆,所述连杆的长度大于移动车身的宽度,所述移动车身的顶面设有与连杆相适配的支撑槽。
13.本发明在一较佳示例中可以进一步配置为:所述滚转夹轮为麦克纳姆轮结构,所述滚转夹轮的数量为两组且呈对称布置于滚转夹头的两侧。
14.本发明所取得的有益效果为:1.本发明中,通过设置新型变形车身结构,利用辅助支撑轮和驱动轮进行移动车身的移动,在移动状态下通过装载夹头和拾取机构将塑料件夹持固定并背负于移动车身表面进行支撑,改变物体重心位置使之位于移动车身正上方提高搬运车体移动稳定性以及背负能力,进行稳定搬运。
15.2.本发明中,利用驱动轮进行移动车身的移动驱动和支撑,在进行物体取放过程中可通过移动车身的偏转进行直立将背面搬运物体进行翻转并配合装载夹头和拾取机构进行塑料件的释放,操作简单适用于大型塑料件的搬运转移自动化作业。
16.3.本发明中,通过采用装载夹头和拾取机构进行工作配合,载主转杆和滚转夹轮转动中通过将塑料件沿夹头座内侧翻转进入夹头座内部由夹头座和滚转夹头进行夹抱,实现物料提升和搬运,拾取机构的转动结构可进行各种异形塑料件的抵接驱动,将塑料件滚动至装载夹头内侧,提高该搬运结构的实用性。
附图说明
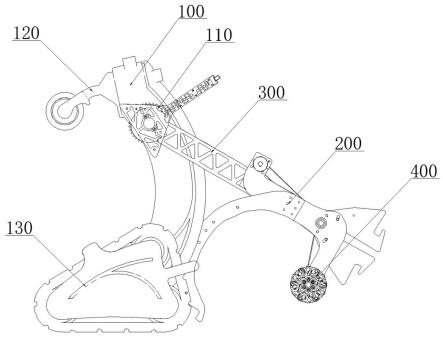
17.图1为本发明一个实施例的整体结构示意图;图2为本发明一个实施例的移动车身结构示意图;图3为本发明一个实施例的装载夹头安装结构示意图;图4为本发明一个实施例的装载夹头和拾取机构安装结构示意图;图5为本发明一个实施例的搬运力臂结构示意图;图6为本发明一个实施例的装载夹头结构示意图;
图7为本发明一个实施例的拾取机构结构示意图。
18.附图标记:100、移动车身;110、偏转座;120、辅助支撑轮;130、驱动轮;140、移动监测摄像头;150、装载监测摄像头;111、主动轮盘;200、装载夹头;210、夹头座;220、驱动座;230、滚转夹头;240、驱动电机;250、配重锤头;211、连杆;221、传动轮轴;222、传动皮带;223、轴承座;300、搬运力臂;310、主转臂;320、伸缩套臂;330、驱动杆;400、拾取机构;410、主转杆;420、滚转夹轮;411、皮带轮。
具体实施方式
19.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
20.下面结合附图描述本发明的一些实施例提供的一种塑料制品生产用自动搬运设备。
21.结合图1-图7所示,本发明提供的一种塑料制品生产用自动搬运设备,包括:移动车身100、装载夹头200、搬运力臂300和拾取机构400,移动车身100底面的两端分别活动安装有辅助支撑轮120和驱动轮130,移动车身100的表面固定安装有驱动轮130,搬运力臂300的一端转动安装于偏转座110的表面且转轴处套接有主动轮盘111,主动轮盘111的表面传动连接有固定于移动车身100表面的电动机,移动车身100的内部设有独立电源和控制器;装载夹头200包括夹头座210、驱动座220、滚转夹头230以及固定于滚转夹头230内侧的配重锤头250,夹头座210的一端固定安装于驱动座220的表面,驱动座220的一端于滚转夹头230的端部固定连接,拾取机构400转动安装于滚转夹头230的另一端,驱动座220的表面固定安装有驱动电机240,拾取机构400包括主转杆410和固定安装于主转杆410两端的滚转夹轮420,主转杆410的表面设有皮带轮411,滚转夹头230的表面转动安装有与驱动电机240和皮带轮411传动连接的传动轮轴221。
22.在该实施例中,驱动轮130为三角形履带轮结构,辅助支撑轮120为万向支撑轮结构,驱动轮130的内侧设有驱动马达,驱动轮130的内侧设有偏转舵机,偏转舵机的输出端与移动车身100的表面固定连接。
23.具体的,分别利用辅助支撑轮120和驱动轮130进行移动车身100的支撑移动和运动驱动,在移动中通过两侧驱动轮130的转速差实现移动车身100的转向控制,由驱动轮130内部驱动马达驱动驱动轮130旋转进行行走,驱动轮130内部偏转舵机用于改变驱动轮130的角度进行背负移动状态和直立装载状态的切换。
24.在该实施例中,移动车身100的表面嵌入安装有位于辅助支撑轮120一侧和移动车身100顶面的移动监测摄像头140和装载监测摄像头150,移动监测摄像头140和装载监测摄像头150呈90
°
夹角布置,移动车身100的输入端电信号连接有远程控制器,远程控制器表面集成有用于接收移动监测摄像头140和装载监测摄像头150数据信号的图像显示模块。
25.具体的,利用移动监测摄像头140和装载监测摄像头150分别在背负移动状态和直立装载状态进行视觉图像监控,从而便于设备进行识别运动路径和搬运物件,实现该搬运
结构的智能化控制,且可通过图像进行远程操控。
26.在该实施例中,搬运力臂300包括主转臂310、伸缩套臂320以及位于伸缩套臂320内侧的驱动杆330,主转臂310的一端滑动套接于主转臂310的一端,伸缩套臂320的两端分别与伸缩套臂320的内侧和主转臂310的表面固定连接,伸缩套臂320的外侧与驱动座220的内侧固定连接。
27.具体的,利用主转臂310和伸缩套臂320的伸缩运动进行远端物体的夹持,以及在行走状态下缩短长度改变物体重心,使物体移动至移动车身100的正上方,保证重心位于移动车身100的支撑面上,进行物体的背负搬运,提高搬运稳定性和负载能力。
28.在该实施例中,滚转夹头230的一端固定安装有轴承座223,主转杆410转动套接于轴承座223的内侧,皮带轮411、传动轮轴221和驱动电机240的输出端套接有用于传动连接的传动皮带222。
29.进一步的,夹头座210呈弧形弯曲状,夹头座210和滚转夹头230连接组合呈c字形结构。
30.具体的,利用驱动电机240在传动皮带222和传动轮轴221的传动下带动主转杆410和滚转夹轮420进行旋转运动,从而通过滚转夹轮420与物件的抵接使物体滚转沿夹头座210内侧曲面进入夹头座210和滚转夹头230内部,实现物体捡拾起搬运。
31.在该实施例中,夹头座210的数量为两个且两个夹头座210之间设有连杆211,连杆211的长度大于移动车身100的宽度,移动车身100的顶面设有与连杆211相适配的支撑槽。
32.具体的,在移动车身100背负移动状态时通过搬运力臂300偏转和收缩运动使夹头座210位于移动车身100正上方,连杆211进入支撑槽利用移动车身100的支撑进行装载夹头200和物体的托持,进行各种大型大质量塑料件的稳定托运。
33.在该实施例中,滚转夹轮420为麦克纳姆轮结构,滚转夹轮420的数量为两组且呈对称布置于滚转夹头230的两侧。
34.具体的,利用滚转夹轮420的转动与物体表面接触带动物体沿夹头座210内侧滚转运动,麦克纳姆轮结构平稳多向的运行特点使重心偏离夹头座210的物体逐渐翻转使之重心与夹头座210位于同一平面内,可进行各种异性件的夹持驱动。
35.本发明的工作原理及使用流程:在使用该塑料制品生产用自动搬运设备时,将控制终端与装载夹头200的控制器进行无线信号连通,设定控制程序和移动路径或直接通过控制终端进行遥控操作,在控制中通过移动监测摄像头140和装载监测摄像头150进行图像获取和远程可视化操作,在装载时首先通过辅助支撑轮120和驱动轮130的移动支撑使移动车身100靠近物体后,由驱动轮130内部偏转舵机使得移动车身100偏转直立,夹头座210和滚转夹头230在搬运力臂300的伸缩驱动以及驱动轮130的偏转下使夹头座210和滚转夹头230套接于物体上方,由驱动电机240驱动主转杆410和滚转夹轮420转动,利用滚转夹轮420的转动与物体表面接触带动物体沿夹头座210内侧滚转运动,麦克纳姆轮结构平稳多向的运行特点使重心偏离夹头座210的物体逐渐翻转使之重心与夹头座210位于同一平面内,利用驱动电机240在传动皮带222和传动轮轴221的传动下带动主转杆410和滚转夹轮420进行旋转运动,从而通过滚转夹轮420与物件的抵接使物体滚转沿夹头座210内侧曲面进入夹头座210和滚转夹头230内部,实现物体捡拾起搬运;搬运完成后,通过驱动轮130和搬运力臂300的偏转使装载夹头200靠进
并贴合移动车身100表面,移动车身100偏转后转变成移动车身100背负移动状态,通过搬运力臂300偏转和收缩运动使夹头座210位于移动车身100正上方,连杆211进入支撑槽利用移动车身100的支撑进行装载夹头200和物体的托持,进行各种大型大质量塑料件的稳定托运。
36.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解,在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1