一种基于施工区域内三维环境建模的塔机防碰撞方法与流程
1.本发明涉及一种基于施工区域内三维环境建模的塔机防碰撞方法,属于塔机防碰撞技术领域。
背景技术:
2.目前市场上塔机的防碰撞系统应用已经很普遍。现有的防碰撞系统主要是利用传感器获取距离信息来精准识别各自的空间轨迹,同时利用激光雷达来探测大臂的周围环境,从而实现防碰撞的功能。
3.上述防碰撞系统只能用于探测大臂的周围环境,并不能探测到吊钩附近的周围环境,如果吊钩周围存在障碍物,现有的防碰撞系统并不能识别到,易造成吊物倾覆,威胁到施工人员的人身安全。
技术实现要素:
4.针对上述现有技术存在的问题,本发明提供一种基于施工区域内三维环境建模的塔机防碰撞方法。
5.为了实现上述目的,本发明采用的一种基于施工区域内三维环境建模的塔机防碰撞方法,包括步骤:
6.将激光雷达安装在吊钩上,利用塔机调整激光雷达的位置,通过自上而下每次移动
△
z米、自内而外每次移动
△
x米的方式,采集塔机施工区域内的多组点云数据;
7.对点云数据进行处理,得到塔机施工区域内的三维空间环境模型;
8.获取吊钩当前的位置,比较与塔机施工区域内的三维空间模型的关系。
9.作为改进,该塔机防碰撞方法具体包括以下步骤:
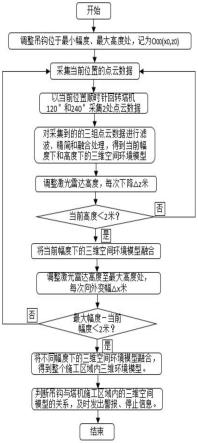
10.s1、将激光雷达安装在吊钩上,利用塔机调整激光雷达的位置至最小幅度和最大高度处,此时记录激光雷达所在的位置点为o
00
(x0,z0);
11.s2、采集该处位置的激光点云数据;
12.s3、回转塔机,顺时针分别旋转120
°
和240
°
,采集该两处位置的激光点云数据;
13.s4、将采集到的三组点云数据进行滤波、精简和融合处理,得到当前幅度和高度下的三维空间环境模型;
14.s5、调整激光雷达高度,每次下降
△
z米;
15.s6、若当前高度≥2米,则重复上述步骤s2至步骤s4;若当前高度<2米,得到每次下降
△
z米后当前幅度和高度下的三维空间环境模型,将当前幅度下不同高度的三维空间环境模型进行融合,得到幅度为x0处的一个三维空间环境模型;
16.s7、调整激光雷达高度至最大高度处,每次向外变幅
△
x米;
17.s8、若最大幅度-当前幅度≥2米,重复上述步骤s2至步骤s6;若最大幅度-当前幅度<2米,得到每次向外变幅
△
x米后的一个三维空间环境模型,将每次向外变幅
△
x米后的三维空间环境模型进行融合,最终得到整个塔机施工区域内的三维空间模型;
18.s9、判断吊钩与塔机施工区域内的三维空间模型的关系,及时发出警报、停止信息。
19.作为改进,所述步骤s1中,将激光雷达安装在吊钩上,通过塔机的起升、回转和变幅机构改变激光雷达的位置。
20.作为改进,所述步骤s4中,采用直通滤波和统计滤波算法去除点云数据中的噪声点。
21.作为改进,所述步骤s4中,采用体素精简法,计算出每组点云数据长、宽、高的最大值,以每组分别设置合适的体素立方体,以该体素立方体的重心代替原体素立方体内所有的点云数据,删除点云数据中较多的冗余数据。
22.作为改进,所述步骤s4中,采用icp点云融合算法将三组点云数据中的任意两组点集分为源点集和目标点集,计算出两个点云数据之间的旋转矩阵和平移矩阵,使得两组点云数据之间的误差最小,得到融合后的点云数据;
23.将第三组点云数据与前两组点云数据再次采用icp点云融合算法融合,最终得到当前幅度和高度下的三维空间环境模型。
24.作为改进,所述步骤s5中,调整激光雷达高度,每次下降
△
z米,直到激光雷达距离地面小于2米,每次下降
△
z米后,采集该处的三组点云数据并进行处理,得到每次下降
△
z米后当前幅度和高度下的三维空间环境模型。
25.作为改进,所述步骤s9中,通过起升、回转和变幅限位器,获取吊钩当前的位置,比较与塔机施工区域内的三维空间模型的关系。
26.作为改进,当吊钩与障碍物的距离小于10m时发出警报信息,当吊钩与障碍物的距离小于3m时使塔机停止运行。
27.与现有技术相比,本发明的塔机防碰撞方法,通过将激光雷达安装在吊钩上,利用塔机的起升、回转和变幅机构改变激光雷达的位置,采集塔机施工区域内的多组点云数据,然后通过控制器处理激光雷达采集到的点云数据(包括点云数据的滤波、精简和融合处理),最终得到一个完整的塔机施工区域内的三维空间环境模型;再通过获取吊钩当前的位置,比较与塔机施工区域内的三维空间模型的关系,从而发出警报和停机指令,达到防止塔机碰撞的目的,有效保证施工人员的人身安全。
附图说明
28.图1为本发明的流程示意图。
具体实施方式
29.为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
30.除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
31.一种基于施工区域内三维环境建模的塔机防碰撞方法,包括步骤:
32.将激光雷达安装在吊钩上,利用塔机调整激光雷达的位置,从多个高度、角度采集当前激光雷达所在位置的激光点云数据;
33.采用直通滤波和统计滤波算法,去除点云数据内的噪声点和离群点,提高施工区域内三维环境建模的准确性,对精简后的点云数据采用体素精简法,将点云数据创建多个三维体素栅格,用每个体素的重心代替原三维体素栅格内的所有点,将点云数据中较多的冗余数据去除,达到简化点云数据的目的,提高后期配准的运算速度,采用icp点云融合算法,将滤波、精简后不同高度、角度下,激光雷达采集到的多组点云数据融合,最终得到一个完整的塔机施工区域内的三维空间环境模型;
34.以当前的三维空间环境模型为边界,对塔机的允许动作范围加以限定,达到防止塔机碰撞的目的。
35.实施例1
36.如图1所示,一种基于施工区域内三维环境建模的塔机防碰撞方法,包括激光雷达、控制器、起升传感器、回转传感器和变幅传感器,所述激光雷达安装在吊钩的正前方,起升传感器、回转传感器和变幅传感器分别安装在塔机上,用于检测塔机的起升、回转和变幅信号,所述控制器分别与激光雷达、起升传感器、回转传感器和变幅传感器连接;
37.具体包括以下步骤:
38.第一步、调整激光雷达的位置至最小幅度和最大高度处,此时记录激光雷达所在的位置点为o
00
(x0,z0);
39.第二步、采集该处位置的激光点云数据,并保存下来;
40.第三步、回转塔机,调整激光雷达位置,顺时针分别旋转120
°
和240
°
,采集该两处位置的激光点云数据,并保存下来;
41.第四步、将采集到的三组点云数据利用直通滤波和统计滤波算法去除点云数据中的噪声点;
42.第五步、采用体素精简法,计算出每组点云数据长、宽、高的最大值,以每组分别设置合适的体素立方体,以该体素立方体的重心代替原体素立方体内所有的点云数据,删除点云数据中较多的冗余数据,达到对点云数据精简的目的;
43.第六步、采用icp点云融合算法将三组点云数据中的任意两组点集分为源点集和目标点集,计算出两个点云数据之间的旋转矩阵和平移矩阵,使得两组点云数据之间的误差最小,得到融合后的点云数据;
44.将第三组点云数据与前两组点云数据再次采用icp点云融合算法融合,最终得到当前幅度和高度下的三维空间环境模型;
45.第七步、调整激光雷达高度,每次下降
△
z米,直到激光雷达距离地面小于2米,每次下降
△
z米后,重复上述第二至第六步,得到每次下降
△
z米后当前幅度和高度下的三维空间环境模型;
46.第八步、将当前幅度下不同高度的三维空间环境模型进行融合,得到一个幅度为x0处的一个三维空间环境模型;
47.第九步、调整激光雷达幅度,每次向外变幅
△
x米,直到激光雷达距离起重臂臂端小于2米,重复上述第二步至第八步,得到每次向外变幅
△
x米后的一个三维空间环境模型;
48.第十步、将每次向外变幅
△
x米后的三维空间环境模型进行融合,最终得到了整个
塔机施工区域内的三维空间模型;
49.第十一步、通过起升、回转和变幅限位器,获取吊钩当前的位置,比较与塔机施工区域内的三维空间模型的关系,当与障碍物的距离小于10m时发出警报信息,当与障碍物的距离小于3m时使塔机停止运行。
50.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1