1.本发明涉及天然气车间搬运技术领域,尤其涉及一种用于天然气车间计量物资搬运的机器人。
背景技术:2.rgv,是有轨制导车辆(rail guided vehicle)的英文缩写 ,又叫有轨穿梭小车, rgv小车可用于各类高密度储存方式的仓库,小车通道可设计任意长,可提高整个仓库储存量,并且在操作时无需叉车驶入巷道,使其安全性会更高,可与自动化生产线对接,实现各种物料的自动移载和转运。然而,搬运机器人在是先从第一工位的设备中移入物料,再通过搬运机器人移动搬运到第二工位的设备后再移出物料。其中,搬运机器人在第一工位的设备中移入物料及在第二工位的设备移出物料的装卸物料的操作还需要人工装卸作业或额外增设的装卸设备来完成,人工装卸作业存在需要占用劳动力、作业效率低下的缺点,而额外增设的装卸设备也存在占用作业空间大及增加搬运成本的缺点。
3.另外,搬运机器人承载物料整体移动搬运的过程中,容易出现颠簸、遇障碍物急停等情况,而造成物料晃动,对于搬运轻薄易碎物料的场合,容易导致物料碎裂或隐裂,使得物料搬运成本增高。再者,现有搬运机器人还存在结构复杂,生产制造成本高的缺点。
4.例如,一种在中国专利文献上公开的“。
技术实现要素:5.为了解决现有技术中天然气车间搬运不便的问题,本发明提供一种用于天然气车间计量物资搬运的机器人,能自动对天然气车间内的计量物资进行检测并搬运,同时能在车间内发生危险时进行报警。
6.为了实现上述目的,本发明提供如下技术方案:一种用于天然气车间计量物资搬运的机器人,包括:机器人主体,机器人主体包括搬运部,搬运部连接有检测模块;检测模块包括声波检测模块,声波检测模块包括声波检测器,声波检测器用于检测次声波与声波;声波检测器连接有计算模块,计算模块用于进行滤波并分类计算声波分布;计算模块连接有声敏电阻,声敏电阻连接有报警装置;声敏电阻阵列布置于机器人主体外端面。能够通过声波检测器对声波进行采集,计算模块将不同的声波信号及对应的电流信号发送到声敏电阻,声敏电阻根据不同的声波大小或电流大小进行报警,能够同时根据声波信号的不同和声波信号的大小进行报警。
7.作为优选的,报警装置包括第一电磁铁,第一电磁铁连接有第二永磁铁,第一电磁铁连接有第一弹簧;第二永磁铁连接有继电开关,继电开关连接有蜂鸣器。第一电磁铁用于在通电后产生和第二永磁铁相反的磁性,能够通过第一电磁铁对不同声波造成的不同电流进行区分,当电流足够大时第一电磁铁克服第一弹簧的拉力与第二永磁铁吸合,进而实现报警,同时通过对电流进行过滤实现声波的过滤,便于根据需要准确报警。
8.作为优选的,计算模块的工作方式为,对检测到的声波进行滤波并获取声波频率
图,根据声波频率图划分采样区间,对采样区间内提取声波采样信号,根据采样信号判断声波来源计量物资或是泄漏点。对检测到的声波进行滤波得到清晰信号,将清晰信号放大并制作呈声波频率图,对声波频率图进行判断处理,判断处理过程包括将声波频率图划分多个采样区间,对多个采样区间内的声波频率图片段进行二次采样,二次采样包括计算其均方差,根据其均方差确定这一片段的代表数,将多个代表数集合成为声波采样信号;将声波采样信号的长度进行统计,设定连续时间阈值,在一个连续时间阈值内声波采样信号的长度保持不变时判断该处声音来源为计量物资或是泄漏点,进一步的,设定声波采样信号的频率阈值,在判断为计量物资或是泄漏点后,在声波采样信号的频率达到频率阈值后判断为泄漏点,未达到频率阈值后判断为计量物资点。能通过对声波信号的处理判断探测到的位置属于物资还是泄漏点,进而实现连续检测。
9.作为优选的,机器人主体设有信号处理介质,所述的信号处理介质设有电性连接的第一单片机和第二单片机,所述的第一单片机用于进行任务控制;所述的第二单片机用于进行动作控制。信号处理介质包括pcb板,通过第一单片机和第二单片机分别对机器人进行控制,使得机器人在完成搬运、检测及调度等多种功能时效率更高,同时对于不同的任务处理位于同一个pcb板上减少了额外的电气元器件连接, 不仅缩小了机器人的体积,更提高了机器人在天然气车间内的安全性。
10.作为优选的,所述的第二单片机连接有多轴联动控制器,多轴联动控制器连接有电机控制模块,电机控制模块位于所述的信号处理介质上。能通过第二单片机控制多轴联动控制器进而实现对机器人本体的移动控制,使得机器人本体在路况复杂的天然气车间不会因为管道等障碍造成移动不便。同时在一个信号处理介质上实现了移动控制和检测计算。
11.作为优选的,机器人本体侧面设有导轨车轮,与导轨车轮所在侧面相邻的侧面设有主轨道车轮,所述的导轨车轮和主导轨车轮均与电机控制模块电连接。导轨车轮位于机器人本体侧面,导轨车轮为对称布置的两组;主导轨车轮位于机器人主体前端面上,主导轨车轮为对称布置的两个,主导轨车路的直径大于导轨车轮的直径。通过电机控制模块对机器人本体的车轮进行控制,实现机器人本体在天然气车间内的自由移动,同时减少了使用多个电机造成的多电路连接,能通过电机控制模块及多轴联动控制器实现不同方向的两组轮子的移动,提高了在天然气车间内的安全性与可靠性。
12.作为优选的,搬运部包括搬运支撑平板,搬运支撑平板对称布置于机器人本体顶面;机器人本体侧面设有控制主机,控制主机设有显示屏。支撑平板用于装载计量物资, 能通过支撑平板将计量物资放置在机器人主体上进行搬运,提高了空间的使用率,同时提高了搬运过程中的稳定性,进而提高了天然气车间内搬运的可靠性;控制主机与介质连接,控制主机用于输入机器人任务,显示屏用于显示机器人本体的任务信息和声波检测结果。能通过机器人顶面对计量物资进行搬运,同时在机器人本体前端面对机器人的工作内容进行布置及监控,便于使用。
13.本发明具有如下优点:(1)通过声波检测模块不仅能对货物进行声波检测,同时对搬运货物途中的天然气车间的泄漏进行检测,通过声波检测泄漏发生,在一些泄漏声音很小的时候起到安全预警作用,提高天然气车间的安全性;(2)通过计算模块对机器人检测到的声波进行处理,将
其中的故障信息段进行提取,进而发出预警信号,提高了泄漏声音检测的准确性与及时性;(3)能通过检测超声波实现货物定位,通过声波检测对气体泄漏进行监测与定位;(4)能通过声波检测的信号筛选计算提高报警的准确度。
附图说明
14.下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
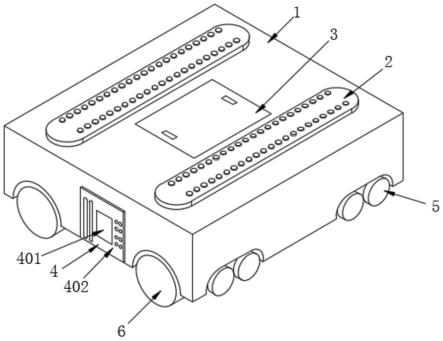
15.图1是本发明的整体结构示意图。
16.图2是第三个实施例中系统控制结构示意图。
17.图3是第三个实施例中第二单片机的控制系统框图。
18.图4是发明中报警装置的连接结构示意图。
19.图中:1-机器人本体;2-搬运支撑平板;3-检修盖板;4-控制主机;5-轨道车轮;6-主轨道车轮;601-第一单片机;602-第二单片机;603-主板;604-电源;605-电机控制模块;606-电机输入模块;607-信息识别模块;608-时间记录模块;609-无线通讯模块;6010-检测模块;7-系统总线;8-监控电路;9-固态存储盘;10-多轴联动控制器;1001-闭环反馈电机模块;1002-闭环转向电机模块;1003-驱动电机模块;1004-闭环电机反馈模块;11-第一电磁铁;12-第二永磁铁;13-第一弹簧;14-继电开关;15-声敏电阻;16-蜂鸣器;401-显示屏;402-电源开关。
具体实施方式
20.以下由特定的具体实施例说明本发明的实施方式,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图 1所示,在一个较佳的实施例中,本发明公开了一种用于天然气车间计量物资搬运的机器人,包括:机器人主体,机器人主体包括搬运部,搬运部连接有检测模块6010;检测模块包括声波检测模块,声波检测模块包括声波检测器,声波检测器用于检测次声波与声波;声波检测器连接有计算模块,计算模块用于进行滤波并分类计算声波分布;计算模块连接有声敏电阻15,声敏电阻连接有报警装置;声敏电阻阵列布置于机器人主体外端面。计算模块将不同的声波信号及对应的电流信号发送到声敏电阻,声敏电阻根据不同的声波大小或电流大小进行报警。如图4所示,报警装置包括第一电磁铁11,第一电磁铁连接有第二永磁铁12,第一电磁铁连接有第一弹簧13;第二永磁铁连接有继电开关14,继电开关连接有蜂鸣器16。第一电磁铁用于在通电后产生和第二永磁铁相反的磁性,能够通过第一电磁铁对不同声波造成的不同电流进行区分,当电流足够大时第一电磁铁克服第一弹簧的拉力与第二永磁铁吸合,进而实现报警,同时通过对电流进行过滤实现声波的过滤,便于根据需要准确报警。阵列布置在机器人本体外围的声敏电阻同时能够接收到来自环境中的声波信号,使得不论是声波检测器还是环境中任意方向均能实现安全监测。
22.在使用时,将计量物资通过搬运部进行搬运,通过检测模块对声波进行检测,其中检测模块连接有超声波发射端,超声波发射超声波到货位探测计量物资,声波检测器接收
返回的超声波及其他声波,声波检测器将检测到的声波信号发送到计算模块进行计算,计算模块将声波检测器的信号计算后将结算结果发送到声敏电阻和搬运部,计算结果包括声波信号和不同大小的电流,声敏电阻接收到不同的声波信号后,根据声波信号强弱改变电阻值,声敏电阻的电阻值变小后通过的电流增大,并将升高的电流传递到第一电磁铁,第一电磁铁得电产生与第二永磁铁相吸的磁性,然后第一电磁铁客服弹簧拉力与第二永磁铁吸合,第二永磁铁导电到继电开关,继电开关闭合使得蜂鸣器得电进行报警。在触发报警的声波消失后,第一电磁铁失电在第一弹簧的作用下与第二永磁铁分离,进而结束报警。而在声波信号较弱时,计算模块仍计算出需要报警,则为需要报警的较弱的声波信号配置大电流,将大电流发送到声敏电阻实现报警。
23.计算模块的工作方式为,对检测到的声波进行滤波并获取声波频率图,根据声波频率图划分采样区间,对采样区间内提取声波采样信号,根据采样信号判断声波来源计量物资或是泄漏点。对检测到的声波进行滤波得到清晰信号,将清晰信号放大并制作呈声波频率图,对声波频率图进行判断处理,判断处理过程包括将声波频率图划分多个采样区间,对多个采样区间内的声波频率图片段进行二次采样,二次采样包括计算其均方差,根据其均方差确定这一片段的代表数,将多个代表数集合成为声波采样信号;将声波采样信号的长度进行统计,设定连续时间阈值,在一个连续时间阈值内声波采样信号的长度保持不变时判断该处声音来源为计量物资或是泄漏点,进一步的,设定声波采样信号的频率阈值,在判断为计量物资或是泄漏点后,在声波采样信号的频率达到频率阈值后判断为泄漏点,未达到频率阈值后判断为计量物资点。能通过对声波信号的处理判断探测到的位置属于物资还是泄漏点,进而实现连续检测。
24.在使用时,对检测到的声波进行滤波后,仅滤掉一定频率范围的声波,截取其采样区间并获取声波采样信号,减少干扰噪音的影响,对于滤波未能滤掉的声波进行二次采样,减少其声波传递过程中反射波的影响,根据代表数获得多个连续的不同频率的声波并集合为声波采样信号,根据声波采样信号的长度与时间阈值判断声波来源为计量物资或是泄漏点。
25.在另二个实施例中,公开了一种用于天然气车间计量物资搬运的机器人,包括机器人本体1,机器人本体1的上端面设有检修盖板3,机器人本体1的上端面设有对称布置的搬运支撑平板2,检修盖板3位于两个对称布置的搬运之后才能平板2之间,机器人本体1的前端面设有控制主机4,控制主机4设有显示屏401,显示屏401旁位于控制主机4上设有电源开关402,同时机器人本体1的前端面转动连接有左右对称布置的主轨道车轮6,机器人本体1的右端面设有转动连接的轨道车轮5,轨道车轮5为对称布置在机器人本体1右端面的两组。控制主机包括第一单片机601和第二单片机602,第一单片机核第二单片相互电性连接于同一主板603上。主板上还设有电源604,电源与第一单片机及第二单片机连接。
26.本发明在使用时,将机器人本体1放置与天然气车车间内,在搬运过程中,控制主机603发送启动信号到闭环反馈电机模块1001、闭环转向电机模块1002、驱动电机模块1003及闭环电机反馈模块1004,从而实现对机器人本体1的移动进行控制。其中,闭环反馈电机模块和闭环转向电机模块分别控制主轨道车轮6的反馈信号和启动信号;驱动电机模块和闭环电机反馈模块分别控制轨道车轮5的启动信号和反馈信号。第一单片机601通过检测机构对货位是否有货进行判断,在没货时发送取货完成指令到第二单片机进行移动。
27.如图2-3所示,在第三个实施例中,搬运部中,第一单片机和第二单片机连接有电源604、电机控制模块605、电机输入模块606的同时还连接有信息识别模块607、时间记录模块608及无线通讯模块609,电机控制模块用于控制电机启停及正反转,电机输入模块用于输入电机工作信号到第二单片机,无线通讯模块用于将机器人本体与外界进行通讯,时间记录模块用于对检测机器人工作过程中的时间进行记录,信息识别模块用于识别机器人工作过程中输入的任务信息。
28.第二单片机与多轴联动控制器之间连接有接系统总线7,监控电路8及固态存储盘9,多轴联动控制器分别与闭环反馈电机模块1001、闭环转向电机模块1002、驱动电机模块1003及闭环电机反馈模块1004连接。
29.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。