一种瓶盖正反面分类输送装置及其输送方法与流程
1.本发明涉及食品加工技术领域,更具体地说,本发明涉及一种瓶盖正反面分类输送装置及其输送方法。
背景技术:
2.瓶盖是一种生活中很常见的物件,在瓶子杯子或者罐子之类的储存物件上都会用到,在食品包装瓶的生产过程中,会将食品放置在瓶子的内部,然后利用旋转装置来将瓶盖拧在瓶子上,完成包装,但是瓶盖在生产过后,为了节约设备成本,很多瓶盖都会采用人工翻盖的方式,即利用人工来将翻盖的瓶盖进行剔除,对于流水线而言,一旦人员离开,则流水线无法继续生产加工,因此使得整体装置的加工过程过于依赖人工,降低了整体自动化的程度。
3.于是,发明人有鉴于此,秉持多年该相关行业丰富的设计开发及实际制作的经验,针对现有的结构及缺失予以研究改良,提供瓶盖正反面分类输送装置及其输送方法,以期达到更具有自动分别高效化的目的。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明的实施例提供一种瓶盖正反面分类输送装置,通过设置导入装置配合转运装置,可以使得瓶盖以任意一种形态进入到其内部,利用转运装置来使得整体瓶盖进行姿势调整,达到规整的目的,并且利用单入机构来进行瓶盖的单一依次进入,使得整体瓶盖的运输变得有序,便于后期的分类识别;通过设置分类运输装置,对依次单个进入的瓶盖来进行分类识别,使得分别后瓶盖可以进行单独的输送,并且整个过程中不需要人员在旁边进行人工操作,因此可以极大的提高整体输送装置的自动化程度,使其不依赖于人工,达到了提高装置工作效率的效果,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种瓶盖正反面分类输送装置及其输送方法,包括导入装置,所述导入装置的底端固定安装有转运装置,所述转运装置的一端固定安装有分类运输装置;所述导入装置包括导料盒,所述导料盒的外壁固定安装有安装环,所述安装环的内壁固定安装有电动伸缩杆,所述电动伸缩杆的底端固定安装有梯形块,所述梯形块的侧面固定安装有压板;所述转运装置包括转运盒,所述转运盒的顶面转动有规整辊,所述转运盒的顶面开设有梯形槽,所述转运盒的内部传动安装有第一传送带,所述第一传送带的一端传动安装有第一传动辊架,所述第一传动辊架的侧面固定安装有安装架,所述安装架顶端的内侧固定安装有单入机构,所述单入机构的侧面固定安装有导向板;所述分类运输装置包括第二传动辊架,所述第二传动辊架的内壁传动安装有第二传送带,所述第二传动辊架的顶端固定安装有分辨机构,所述第二传动辊架的侧面固定安
装有横板,所述横板的顶端固定安装有挡板。
6.在一个优选地实施方式中,所述规整辊包括辊体,所述辊体的外壁固定安装有排入板,所述辊体左右两端的外表面均固定安装有限位环,所述辊体的一端开设有六角槽。
7.在一个优选地实施方式中,所述单入机构包括三角板,所述三角板的侧面固定安装有隔板,所述三角板的顶端固定安装有顶板,所述顶板的底面固定安装有凸形柱,所述凸形柱的表面转动安装有转动柱。
8.在一个优选地实施方式中,所述分辨机构包括安装底架,所述安装底架的顶端分别固定安装有第一气缸和第二气缸,所述第二气缸的末端固定安装有直角板,所述安装底架的顶面固定安装有支撑架,所述支撑架顶端的左右两侧分别固定安装有第一光电传感器和第二光电传感器,所述安装底架的中部固定安装有过渡板,所述过渡板的顶面转动安装有滚柱,所述过渡板的一端固定安装有第三光电传感器,所述过渡板的左端一体形成有中隔板。
9.在一个优选地实施方式中,所述导料盒的内壁设置为等腰梯形结构,且其底端开设有半圆槽,并通过半圆槽与转运盒的顶端固定连通,所述压板的底端一体形成有压平凸块。
10.在一个优选地实施方式中,所述单入机构和导向板的数量均为两个并且呈对称分布,所述的形状和梯形块的形状相适配。
11.在一个优选地实施方式中,所述排入板的数量为六个,且其外壁均设置为曲面结构,所述辊体通过限位环转动安装在半圆槽的内部,利用曲面结构可以适应瓶盖的曲度侧面,从而可以进一步的提高整体转运的高防护形,防止平面对瓶盖造成积压等产生形变。
12.在一个优选地实施方式中,所述转动柱的数量为若干个,若干个转动柱呈斜线排布,所述隔板的末端设置为圆角结构,所述三角板的左端固定安装在导向板的侧面,所述三角板的背面固定安装在安装架顶端的内壁,利用隔板的圆角结构以及转动柱的斜线排布来使得瓶盖可以单个依次进入到分类运输装置的内部便于后面的单个分别。
13.在一个优选地实施方式中,所述第一气缸和第二气缸的端口均固定连接有气压装置,所述第一光电传感器、第二光电传感器和第三光电传感器均电性连接有控制终端,所述控制终端与气压装置相互电性连接,所述安装底架一侧的右端固定安装在第二传动辊架的侧面,所述安装底架的底端位于第二传送带的内部,所述过渡板位于第二传送带的中部,利用控制终端和气压装置来实现分级的气缸控制,从而达到分辨的目的,并且自动化控制可以使得不需要装置依赖于人工,从而达到了提高整体装置的自动化程度的目的。
14.在一个优选地实施方式中,上述分类装置的分类方法如下步骤:s1、首先将所有驱动装置通电,并且利用现有的驱动电机套接在六角槽的内部带动规整辊整体进行转动,将需要进行瓶盖投入到导料盒的内部,经过规整辊的翻转,使得瓶盖均以平躺的姿态进入到转运盒的内部。
15.s2、进入到转运盒内部的瓶盖,平躺的姿态从第一传送带的右端进入到左端,期间通过单入机构的有效限位阻隔,来使得杂乱的瓶盖逐步的一个一个从导向板的内部进入到分类运输装置的内部。
16.s3、瓶盖进入到分辨机构的内部,根据瓶盖的高度差值的变量来进行分级控制,第一种,瓶盖盖顶朝上进入,第一光电传感器识别到盖体顶端信号,通过控制终端发出信号给
气压装置,利用气压装置来对第一气缸进行调控,使其进行阻挡,然后随着第二传送带的移动,瓶盖被第二光电传感器识别到,同理,第二气缸带动直角板将瓶盖推入至右边的第二传送带表面,并且直角板的侧面阻挡下一个瓶盖进入到分类运输装置的内部,右边的第二传送带不设阻挡,但是当第三光电传感器识别到有瓶盖经过时,利用控制终端配合气压装置来使得第一气缸与安装底架进行同时复位,第二种,则第一气缸和第二气缸接收不到信号则不作出反应,所以两种状态的瓶盖将自动按类别进行分类从两个第二传送带的表面依次传出,最后将分类运输装置的右端连接至后续加工过程即可。
17.本发明的技术效果和优点:1、本发明通过设置导入装置配合转运装置,可以使得瓶盖以任意一种形态进入到其内部,利用转运装置来使得整体瓶盖进行姿势调整,达到规整的目的,并且利用单入机构来进行瓶盖的单一依次进入,使得整体瓶盖的运输变得有序,便于后期的分类识别。
18.2、本发明通过设置分类运输装置,对依次单个进入的瓶盖来进行分类识别,使得分别后瓶盖可以进行单独的输送,并且整个过程中不需要人员在旁边进行人工操作,因此可以极大的提高整体输送装置的自动化程度,使其不依赖于人工,达到了提高装置工作效率的效果。
附图说明
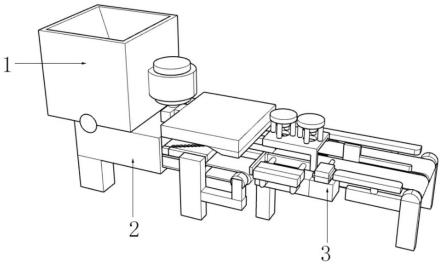
19.图1为本发明的整体结构示意图。
20.图2为本发明的立体装配结构示意图。
21.图3为本发明的导入装置连接结构示意图。
22.图4为本发明的转运装置结构示意图。
23.图5为本发明的规整辊结构示意图。
24.图6为本发明的单入机构结构示意图。
25.图7为本发明的分类运输装置结构示意图。
26.图8为本发明的分辨机构结构示意图。
27.附图标记为:1、导入装置;2、转运装置;3、分类运输装置;11、导料盒;12、安装环;13、电动伸缩杆;14、梯形块;15、压板;21、转运盒;22、规整辊;23、安装架;24、第一传动辊架;25、第一传送带;26、单入机构;27、导向板;28、梯形槽;221、辊体;222、排入板;223、限位环;224、六角槽;261、三角板;262、隔板;263、顶板;264、凸形柱;265、转动柱;31、第二传动辊架;32、第二传送带;33、分辨机构;34、横板;35、挡板;331、安装底架;332、第一气缸;333、第二气缸;334、直角板;335、支撑架;336、第一光电传感器;337、第二光电传感器;338、过渡板;3391、滚柱;339、第三光电传感器;3310、中隔板。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.如附图1-7所示的一种瓶盖正反面分类输送装置,包括导入装置1,所述导入装置1
的底端固定安装有转运装置2,所述转运装置2的一端固定安装有分类运输装置3;所述导入装置1包括导料盒11,所述导料盒11的外壁固定安装有安装环12,所述安装环12的内壁固定安装有电动伸缩杆13,所述电动伸缩杆13的底端固定安装有梯形块14,所述梯形块14的侧面固定安装有压板15;所述转运装置2包括转运盒21,所述转运盒21的顶面转动有规整辊22,所述转运盒21的顶面开设有梯形槽28,所述转运盒21的内部传动安装有第一传送带25,所述第一传送带25的一端传动安装有第一传动辊架24,所述第一传动辊架24的侧面固定安装有安装架23,所述安装架23顶端的内侧固定安装有单入机构26,所述单入机构26的侧面固定安装有导向板27;所述分类运输装置3包括第二传动辊架31,所述第二传动辊架31的内壁传动安装有第二传送带32,所述第二传动辊架31的顶端固定安装有分辨机构33,所述第二传动辊架31的侧面固定安装有横板34,所述横板34的顶端固定安装有挡板35。
30.其中,如附图4和附图6,所述规整辊22包括辊体221,所述辊体221的外壁固定安装有排入板222,所述辊体221左右两端的外表面均固定安装有限位环223,所述辊体221的一端开设有六角槽224,所述单入机构26包括三角板261,所述三角板261的侧面固定安装有隔板262,所述三角板261的顶端固定安装有顶板263,所述顶板263的底面固定安装有凸形柱264,所述凸形柱264的表面转动安装有转动柱265,所述排入板222的数量为六个,且其外壁均设置为曲面结构,所述辊体221通过限位环223转动安装在半圆槽的内部,利用曲面结构可以适应瓶盖的曲度侧面,从而可以进一步的提高整体转运的高防护形,防止平面对瓶盖造成积压等产生形变,所述转动柱265的数量为若干个,若干个转动柱265呈斜线排布,所述隔板262的末端设置为圆角结构,所述三角板261的左端固定安装在导向板27的侧面,所述三角板261的背面固定安装在安装架23顶端的内壁,利用隔板262的圆角结构以及转动柱265的斜线排布来使得瓶盖可以单个依次进入到分类运输装置3的内部便于后面的单个分别。
31.其中,如附图7和8,所述分辨机构33包括安装底架331,所述安装底架331的顶端分别固定安装有第一气缸332和第二气缸333,所述第二气缸333的末端固定安装有直角板334,所述安装底架331的顶面固定安装有支撑架335,所述支撑架335顶端的左右两侧分别固定安装有第一光电传感器336和第二光电传感器337,所述安装底架331的中部固定安装有过渡板338,所述过渡板338的顶面转动安装有滚柱3391,所述过渡板338的一端固定安装有第三光电传感器339,所述过渡板338的左端一体形成有中隔板3310,所述第一气缸332和第二气缸333的端口均固定连接有气压装置,所述第一光电传感器336、第二光电传感器337和第三光电传感器339均电性连接有控制终端,所述控制终端与气压装置相互电性连接,所述安装底架331一侧的右端固定安装在第二传动辊架31的侧面,所述安装底架331的底端位于第二传送带32的内部,所述过渡板338位于第二传送带32的中部,利用控制终端和气压装置来实现分级的气缸控制,从而达到分辨的目的,并且自动化控制可以使得不需要装置依赖于人工,从而达到了提高整体装置的自动化程度的目的。
32.本发明工作原理:s1、首先将所有驱动装置通电,并且利用现有的驱动电机套接在六角槽224的内部带动规整辊22整体进行转动,将需要进行瓶盖投入到导料盒11的内部,经过规整辊22的翻
转,使得瓶盖均以平躺的姿态进入到转运盒21的内部;s2、进入到转运盒21内部的瓶盖,平躺的姿态从第一传送带25的一端进入到另一端,期间通过单入机构26的有效限位阻隔,来使得杂乱的瓶盖逐步的一个一个从导向板27的内部进入到分类运输装置3的内部;s3、瓶盖进入到分辨机构33的内部,根据瓶盖的高度差值的变量来进行分级控制,第一种,瓶盖盖顶朝上进入,第一光电传感器336识别到盖体顶端信号,通过控制终端发出信号给气压装置,利用气压装置来对第一气缸332进行调控,使其进行阻挡,然后随着第二传送带32的移动,瓶盖被第二光电传感器337识别到,同理,第二气缸333带动直角板334将瓶盖推入至右边的第二传送带32表面,并且直角板334的侧面阻挡下一个瓶盖进入到分类运输装置3的内部,右边的第二传送带32不设阻挡,但是当第三光电传感器339识别到有瓶盖经过时,利用控制终端配合气压装置来使得第一气缸332与安装底架331进行同时复位,第二种,则第一气缸332和第二气缸333接收不到信号则不作出反应,所以两种状态的瓶盖将自动按类别进行分类从两个第二传送带32的表面依次传出,最后将分类运输装置3的右端连接至后续加工过程即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1