一种木托盘输送码垛机器人的制作方法
1.本发明涉及木托盘码垛技术领域,具体为一种木托盘输送码垛机器人。
背景技术:
2.木托盘是以天然木材为原料制造的托盘,其是用于集装、堆放、搬运和运输作为单元负荷的货物和制品的水平平台装置,一般用木材、金属、纤维板制作,便于装卸、搬运单元物资和小数量的物资,由于木材价格便宜且结实,因此木托盘是现在使用最广的托盘种类。
3.木托盘的尺寸较大,因此需要对其进行码垛,从而减小场地的浪费,传统的码垛方式一般采用人工或机械配合的方式,当机械码垛完成一组木托盘架后,需要采用叉车将其移出机械,在此期间机械无法继续进行码垛,从而导致机械的码垛效率较低,且在叉车将木托盘架与机械分离的过程中,木托盘架上的木托盘极易移位,从而增加后续的处理工序,增加码垛成本。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种木托盘输送码垛机器人。
5.一种木托盘输送码垛机器人,包括输送单元与码垛单元,所述输送单元上端固定安装有码垛单元。
6.所述输送单元包括运输台,运输台上左右对称转动连接有链轮一,运输台后端通过电机座固定安装有电机一,电机一输出轴通过联轴器与左侧的链轮一固定连接,链轮一之间通过齿链带传动连接,运输台前后两侧相对端均固定安装有多个可伸缩连接杆,每一侧的可伸缩连接杆末端均共同固定安装有夹紧板。
7.所述码垛单元包括支撑手臂,支撑手臂上通过电机座固定安装有步进电机二,步进电机二输出轴通过联轴器固定安装有转动支架,转动支架与支撑手臂之间转动连接,转动支架下端左右两侧固定安装有移动气缸,移动气缸下端固定安装有矩形码垛框,矩形码垛框下端固定安装有控制挡架,运输台右侧且位于左侧的矩形码垛框下端开设有矩形凹槽,矩形凹槽上端固定安装有挤压气缸,挤压气缸上端固定安装有对齐码垛架,夹紧板右端与左侧的矩形码垛框固定连接。
8.优选技术方案一:所述矩形码垛框包括矩形框架,移动气缸下端固定安装有矩形框架,矩形框架内壁左右对称固定安装有电动推杆一,矩形框架内壁前后对称固定安装有电动推杆二,其中一个电动推杆一与相邻的电动推杆二之间共同固定安装有直角定位板,剩余的电动推杆一与电动推杆二之间共同固定安装有直角定位板,直角定位板之间以滑动配合的方式相连接,直角定位板与矩形框架之间以滑动配合的方式相连接。
9.优选技术方案二:所述直角定位板上开设有矩形导向槽2541,两个直角定位板254上开设的矩形导向槽2541左右对称分布,矩形导向槽内以滑动配合的方式连接有滑移块,滑移块与电动推杆一固定连接,滑移块上下对称固定安装有导向矩形块,左侧的直角定位板左端均固定安装有可伸缩连接板,可伸缩连接板与相靠近的夹紧板之间卡接,可伸缩连
接板与矩形框架之间以滑动配合的方式相连接。
10.优选技术方案三:所述对齐码垛架包括方形块,方形块四个拐角均开设有圆角,方形块上端均匀固定安装有橡胶吸盘,橡胶吸盘相互联通,方形块下端固定安装有气泵,最右侧的橡胶吸盘下端固定安装有通气管,通气管下端与气泵进气口固定连接。
11.优选技术方案四:所述控制挡架包括电动伸缩杆,矩形框架左右对称开设有限位槽,限位槽内端固定安装有电动伸缩杆,电动伸缩杆末端固定安装有e字形板,e字形板朝向电动伸缩杆一端均匀固定安装有贯穿矩形框架的导向杆。
12.优选技术方案五:所述矩形框架内端前侧固定安装有印刷气缸,印刷气缸后端固定安装有固定块,固定块后端以螺纹连接的方式连接有印刷印章,印刷印章内固定安装有电热丝,前侧的直角定位板前端开设有防干涉通孔。
13.优选技术方案六:所述直角定位板内端面均匀开设有有弧形卡槽,弧形卡槽内通过销轴转动连接有磨砂球,磨砂球表面粗糙,弧形卡槽开口处向下倾斜,弧形卡槽内固定安装有清扫刷。
14.优选技术方案七:所述运输台前后相对端均固定安装有定位柱,定位柱上套有巨型扭簧,定位柱上转动连接有阻挡板,巨型扭簧一端与运输台固定连接,巨型扭簧另一端与阻挡板固定连接,夹紧板相对端均转动连接有滚动柱,矩形框架与直角定位板上开设有防干涉槽,两个直角定位板上的防干涉槽以及矩形框架上的防干涉槽均呈前后对称分布。
15.本发明具备以下有益效果:1、本发明提供的一种木托盘输送码垛机器人,通过输送单元与码垛单元相配合,对木托盘进行运输,并对其进行码垛处理,码垛过程中,码垛单元的尺寸可根据木托盘的尺寸进行调整,以达到提高设备的使用效率的目的,木托盘上升过程中不会移动,从而保证木托盘顺利进行码垛,码垛完成后的木托盘架可整体移动,在将木托盘架与设备分离的过程中,输送单元上的木托盘继续向右移动进行码垛,从而提高设备的码垛效率。
16.2、本发明设置的输送单元,通过巨型扭簧与阻挡板相配合,使木托盘顺利向上移动,且可防止上移后的木托盘下移,通过滚动柱减小木托盘移动过程中受到的摩擦阻力,通过防干涉槽避免干涉阻挡板的转动。
17.3、本发明设置的码垛单元,通过矩形导向槽与滑移块相配合,防止电动推杆一干涉电动推杆二的伸缩,使直角定位板能够相向移动。
18.4、本发明设置的码垛单元,通过磨砂球对木托盘外表面进行打磨,通过清扫刷对磨砂球表面附着的木屑进行清扫。
附图说明
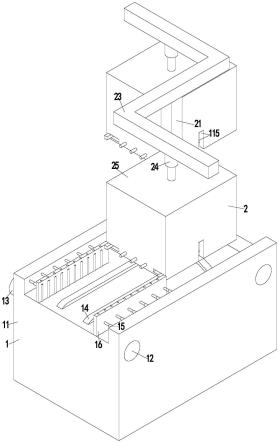
19.图1为本发明的主视立体结构示意图。
20.图2为本发明的主视剖视结构示意图。
21.图3为本发明的图2的a-a向的剖视图。
22.图4为本发明的图3的n处的局部放大图。
23.图5为本发明的图3的m处的局部放大图。
24.图6为本发明的直角定位板的主视立体结构示意图。
25.图中:1、输送单元;11、运输台;111、定位柱;112、巨型扭簧;113、阻挡板;114、滚动
柱;115、防干涉槽;12、链轮一;13、电机一;14、齿链带;15、可伸缩连接杆;16、夹紧板;2、码垛单元;21、支撑手臂;22、步进电机二;23、转动支架;24、移动气缸;25、矩形码垛框;251、矩形框架;2511、印刷气缸;2512、固定块;2513、印刷印章;2514、电热丝;2515、防干涉通孔;252、电动推杆一;253、电动推杆二;254、直角定位板;2541、矩形导向槽;2542、滑移块;2543、导向矩形块;2544、可伸缩连接板;255、弧形卡槽;256、磨砂球;257、清扫刷;26、控制挡架;262、限位槽;261、电动伸缩杆;263、e字形板;264、导向杆;27、矩形凹槽;28、挤压气缸;29、对齐码垛架;291、方形块;292、圆角;293、橡胶吸盘;294、气泵;295、通气管。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.参阅图1,一种木托盘输送码垛机器人,包括输送单元1与码垛单元2,所述输送单元1上端固定安装有码垛单元2。
28.参阅图1,所述输送单元1包括运输台11,运输台11上左右对称转动连接有链轮一12,运输台11后端通过电机座固定安装有电机一13,电机一13输出轴通过联轴器与左侧的链轮一12固定连接,链轮一12之间通过齿链带14传动连接,运输台11前后两侧相对端均固定安装有多个可伸缩连接杆15,每一侧的可伸缩连接杆15末端均共同固定安装有夹紧板16;首先通过机械手臂将加工完成的木托盘放置在齿链带14上,通过电机一13带动链轮一12转动,从而带动木托盘向右移动,通过夹紧板16对木托盘前后两端进行施力,从而使木托盘居中运输。
29.参阅图1与图3,所述码垛单元2包括支撑手臂21,支撑手臂21上通过电机座固定安装有步进电机二22,步进电机二22输出轴通过联轴器固定安装有转动支架23,转动支架23与支撑手臂21之间转动连接,转动支架23下端左右两侧固定安装有移动气缸24,移动气缸24下端固定安装有矩形码垛框25,矩形码垛框25下端固定安装有控制挡架26,运输台11右侧且位于左侧的矩形码垛框25下端开设有矩形凹槽27,矩形凹槽27上端固定安装有挤压气缸28,挤压气缸28上端固定安装有对齐码垛架29,夹紧板16右端与左侧的矩形码垛框25可拆卸连接;根据木托盘的尺寸调整矩形码垛框25的尺寸,从而带动夹紧板16移动,对木托盘施力,当木托盘运输至左侧的矩形码垛框25正下方时,通过挤压气缸28带动对齐码垛架29向上移动,使木托盘进入矩形码垛框25内,当码垛完成后,关闭控制挡架26,对木托盘进行支撑,通过步进电机二22带动转动支架23转动,从而使码垛完成后的木托盘运输至输送单元1右侧,此时通过移动气缸24带动矩形码垛框25向下移动,直至矩形码垛框25底部与地面接触,此时打开控制挡架26,使码垛完成的木托盘向下掉落至地面,以达到与装置分离的目的,转动至左侧的矩形码垛框25则继续进行木托盘的码垛。
30.参阅图2与图3,所述矩形码垛框25包括矩形框架251,移动气缸24下端固定安装有矩形框架251,矩形框架251内壁左右对称固定安装有电动推杆一252,矩形框架251内壁前后对称固定安装有电动推杆二253,其中一个电动推杆一252与相邻的电动推杆二253之间共同固定安装有直角定位板254,剩余的电动推杆一252与电动推杆二253之间共同固定安
装有直角定位板254,直角定位板254之间以滑动配合的方式相连接,直角定位板254与矩形框架251之间以滑动配合的方式相连接;通过电动推杆一252与电动推杆二253带动直角定位板254移动,从而控制直角定位板254之间构成的空间尺寸,使其符合木托盘的尺寸。
31.参阅图2与图6,所述直角定位板254上开设有矩形导向槽2541,两个直角定位板254上开设的矩形导向槽2541左右对称分布,矩形导向槽2541内以滑动配合的方式连接有滑移块2542,滑移块2542与电动推杆一252固定连接,滑移块2542上下对称固定安装有导向矩形块2543,左侧的直角定位板254左端均固定安装有可伸缩连接板2544,可伸缩连接板2544与相靠近的夹紧板16之间卡接,可伸缩连接板2544与矩形框架251之间以滑动配合的方式相连接;通过矩形导向槽2541与滑移块2542相配合,防止电动推杆一252干涉电动推杆二253的伸缩,通过可伸缩连接板2544对夹紧板16与直角定位板254进行连接,当需要转动转动支架23时,人工将可伸缩连接板2544与夹紧板16分离,防止夹紧板16干涉转动支架23的转动。
32.参阅图2,所述对齐码垛架29包括方形块291,方形块291四个拐角均开设有圆角292,方形块291上端均匀固定安装有橡胶吸盘293,橡胶吸盘293相互联通,方形块291下端固定安装有气泵294,最右侧的橡胶吸盘293下端固定安装有通气管295,通气管295下端与气泵294进气口固定连接;当方形块291与木托盘紧贴后,通过气泵294将橡胶吸盘293与木托盘之间的空气吸出,以达到对木托盘进行固定的目的,防止木托盘在向上移动的过程中受力偏移,从而难以进入直角定位板254之间的空间内。
33.参阅图2,所述控制挡架26包括限位槽262,矩形框架251左右对称开设有限位槽262,限位槽262内端固定安装有电动伸缩杆261,电动伸缩杆261末端固定安装有e字形板263,e字形板263朝向电动伸缩杆261一端均匀固定安装有贯穿矩形框架251的导向杆264;通过e字形板263对木托盘进行支撑,通过导向杆264使e字形板263受力平衡。
34.参阅图5,所述矩形框架251内端前侧固定安装有印刷气缸2511,印刷气缸2511后端固定安装有固定块2512,固定块2512后端以螺纹连接的方式连接有印刷印章2513,印刷印章2513内固定安装有电热丝2514,前侧的直角定位板254前端开设有防干涉通孔2515;通过印刷气缸2511带动固定块2512上的印刷印章2513与木托盘接触,通过电热丝2514使印刷印章2513对木托盘表面进行印痕加工。
35.参阅图4,所述直角定位板254内端面均匀开设有有弧形卡槽255,弧形卡槽255内通过销轴转动连接有磨砂球256,磨砂球256表面粗糙,弧形卡槽255开口处向下倾斜,弧形卡槽255内固定安装有清扫刷257;在木托盘进入直角定位板254内部时,磨砂球256对木托盘外表面进行打磨,通过清扫刷257对磨砂球256表面附着的木屑进行清扫。
36.参阅图2、图3与图6,所述运输台11前后相对端均固定安装有定位柱111,定位柱111上套有巨型扭簧112,定位柱111上转动连接有阻挡板113,巨型扭簧112一端与运输台11固定连接,巨型扭簧112另一端与阻挡板113固定连接,夹紧板16相对端均转动连接有滚动柱114,矩形框架251与直角定位板254上开设有防干涉槽115,两个直角定位板254上的防干涉槽115以及矩形框架251上的防干涉槽115均呈前后对称分布;当方形块291带动木托盘向上移动时,阻挡板113受力转动,防止阻挡木托盘的上移,当木托盘上移后,巨型扭簧112带动阻挡板113回复至原始状态,防止木托盘下移,通过滚动柱114减小木托盘移动过程中受到的摩擦阻力,通过防干涉槽115防止干涉阻挡板113的转动。
37.具体工作时,首先通过机械手臂将加工完成的木托盘放置在齿链带14上,通过电机一13带动链轮一12转动,从而带动木托盘向右移动,通过夹紧板16对木托盘前后两端进行施力,从而使木托盘居中运输,根据木托盘的尺寸调整矩形码垛框25的尺寸,从而带动夹紧板16移动,对木托盘进行施力,当木托盘运输至左侧的矩形码垛框25正下方时,通过挤压气缸28带动对齐码垛架29向上移动,使木托盘进入矩形码垛框25内,当码垛完成后,关闭控制挡架26,对木托盘进行支撑,通过步进电机二22带动转动支架23转动,从而使码垛完成后的木托盘运输至运输单元右侧,此时通过移动气缸24带动矩形码垛框25向下移动,直至矩形码垛框25底部与地面接触,此时打开控制挡架26,使码垛完成的木托盘向下掉落至地面,以达到与装置分离的目的,转动至左侧的矩形码垛框25继续进行木托盘的码垛。
38.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1