一种臂架系统及履带式起重机的制作方法
1.本发明公开了一种臂架系统及履带式起重机,涉及履带式起重机技术领域。
背景技术:
2.履带起重机是在行走的履带底盘上装有行走装置、起重装置、变幅装置和回转装置的桁架式臂架结构起重机,其中起重装置主要为主臂、副臂、塔臂等,变幅装置指安装于转台的人字架、人字架与主臂间通过变幅钢丝绳连接的变幅滑轮组等。为确保履带起重机安全工作,需提取臂架受力情况,在主臂与人字架间安装拉力力限器,提取受力数据传递至主机面板;
3.现有技术中,拉力力限器一端与臂头连接,另一端通过拉板(拉锁)连接变幅滑轮组,由于拉板(拉锁)属于柔性体,会产生挠度现象,同时考虑整机作业过程中的风载和振动等因素,均会对拉力力限器精准度产生影响,导致实际测量拉板(拉锁)力误差较大,降低了整机作业的安全性。
4.拉力力限器通过拉板(拉锁)与臂头连接,位置靠近臂头,臂头在工作过程中,位置较高,不利于拉力力限器的维护与防护,防水防潮性较差,且力限器数据通过线缆传输,力限器距离驾驶室较远,导致线缆通道较长,不易捆扎,美观性较差,成本较高。
技术实现要素:
5.本发明针对上述背景技术中的缺陷,提供一种臂架系统及履带式起重机,准确提取臂架拉板系统受力数据,提高工作可靠性。
6.为实现上述目的,本发明采用的技术方案如下:一种臂架系统,包括:转台、力限器和人字架;人字架连接于转台上;力限器连接于人字架底部,力限器一端与人字架相连,力限器的另一端连接转台;所述人字架的头部连接人字架滑轮组,所述人字架滑轮组通过变幅钢丝绳连接变幅滑轮组,所述变幅滑轮组通过拉索连接第一单拉板一端,第一单拉板另一端通过销轴连接主臂头部连接铰点拉起主臂,主臂尾部铰接于转台,起升钢丝绳由主起升卷扬出发,起升钢丝绳用于通过主臂定滑轮与主臂臂头滑轮吊起重物。
7.进一步的,所述人字架包括:人字架后拉板和人字架前撑杆;人字架后拉板和人字架前撑杆的头部通过销轴连接,人字架前撑杆头部穿入滑轮轴连接人字架滑轮组。
8.进一步的,所述人字架后拉板下端与转接板上端连接,转接板下端分别与第二单拉板和第一双拉板连接,第二单拉板的另一端铰接于转台,第一双拉板依次铰接力限器、第二双拉板,最后铰接于转台。
9.进一步的,所述第二单拉板和第一双拉板所在直线对称于人字架后拉板所在直线。
10.进一步的,第二单拉板和第一双拉板之间的夹角在[0
°
~120
°
]。
[0011]
进一步的,所述人字架后拉板下端与转接板上端连接,转接板下端分别与第二单拉板和力限器的一端铰接,第二单拉板、力限器之间平行设置,第二单拉板、力限器另一端
分别铰接另一个转接板一端,且其另一端铰接短拉板,短拉板与转台铰接。
[0012]
进一步的,将所述的第二单拉板替换为一个力限器。
[0013]
一种履带式起重机,包括起重机车体,起重机车体连接上述的臂架系统,起重机车体上连接转台。
[0014]
有益效果:本发明力限器放置在人字架根部,可有效减少起重机工作过程中风力以及钢丝绳自身振动等因素对力限器造成的干扰,数据受外界环境因素干扰降低,力值测算精准度高。
[0015]
本发明由于力限器放置在人字架根部,人字架后拉板所受拉力由力限器与单拉板共同承担,受力较小,可选型小规格力限器,节约成本。
[0016]
本发明通过力限器放置在人字架根部,线缆可由驾驶室电气柜利用转台空间直接连接力限器,避免线缆由驾驶室电气柜延伸至臂头,有效减少线缆使用长度,提升转台空间利用率,优化线缆布局,降低成本,增强美观性,提升维修便利性。
附图说明
[0017]
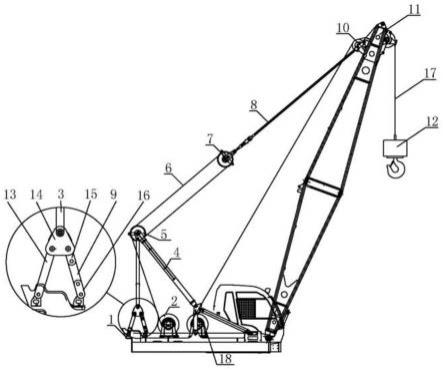
图1为本发明的结构示意图;
[0018]
图2为拉索受力简图;
[0019]
图3为人字架受力简图;
[0020]
图4为力限器受力简图;
[0021]
图5为第二种力限器安装的结构示意图;
[0022]
图6为第三种力限器安装的结构示意图;
[0023]
图7为第二、第三种力限器安装的受力简图。
具体实施方式
[0024]
下面结合附图对技术方案的实施作进一步的详细描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0025]
如图1所示的一种实施例:
[0026]
实施例一:
[0027]
一种履带式起重机,包括起重机车体,起重机车体连接上述的臂架系统,起重机车体上连接转台1。
[0028]
所述的一种臂架系统,包括:转台1、力限器9和人字架;人字架连接于转台1上;力限器9连接于人字架底部,力限器9一端与人字架相连,力限器9的另一端连接转台1;所述人字架4的头部连接人字架滑轮组5,所述人字架滑轮组5通过变幅钢丝绳6连接变幅滑轮组7,所述变幅滑轮组7通过拉索8连接第一单拉板10一端,第一单拉板10另一端通过销轴连接主臂11头部连接铰点拉起主臂,主臂11尾部铰接于转台1,起升钢丝绳由主起升卷扬18出发,起升钢丝绳用于通过主臂定滑轮与主臂臂头滑轮吊起重物12。
[0029]
所述人字架4包括:人字架后拉板3和人字架前撑杆4,所述人字架后拉板3和人字架前撑杆4的头部通过销轴连接,人字架前撑杆4头部穿入滑轮轴连接人字架滑轮组5。
[0030]
所述人字架后拉板3下端与转接板14上端连接,转接板14下端分别与第二单拉板13和第一双拉板15连接,第二单拉板13的另一端铰接于转台1,第一双拉板15依次铰接力限
器9、第二双拉板16,最后铰接于转台1。
[0031]
所述第二单拉板13和第一双拉板15所在直线对称于人字架后拉板3所在直线。
[0032]
第二单拉板13和第一双拉板15之间的夹角在[0
°
~120
°
]。
[0033]
如图2~4所示,力限器9的数据获取方式如下:
[0034]
重物的重力通过力系分解可求出沿着拉索方向的分力,变幅平面内载荷引起的拉索力受力;
[0035]
对臂架铰点a取矩,可求得第一单拉板10的受力:
[0036]fg
=(glcosθb+0.5mglcosθ)/(lsinθg)
[0037]
其中,θ为臂架仰角;mg为臂架自重;g为重物的重力;l为臂架长度;fg为第一单拉板的拉板力;θb为地面与臂架轴线夹角,θg为拉板力与臂架轴线夹角;
[0038]
对人字架头部滑轮组进行受力分析,已知拉索拉力与第一单拉板的拉板力相同,可根据公式f1=fnsinθ2+fgsinθ1,fncosθ2=fgcosθ1,消除fn求得人字架后拉板拉力f1(可忽略人字架后拉板的重力),
[0039]
其中,fn为人字架前撑杆的支持力;
[0040]
f1=fg(cosθ1sinθ2/cosθ2+sinθ1)
[0041]
设第二单拉板13、第二双拉板15间夹角θ,可根据公式f1=2f2(cosθ/2)求得力限器拉力f2,
[0042]
f2=f1/2(cosθ/2)。
[0043]
力限器拉力f2大小可转换为数据传递至驾驶室主面板进行显示。
[0044]
实施二:
[0045]
如图5、7所示一种实施例,除上述实施例一中技术方案以外,本实施例中:人字架后拉板3下端与转接板14上端连接,转接板14下端分别与第二单拉板13和力限器9的一端铰接,第二单拉板13、力限器9之间平行设置,第二单拉板13、力限器9另一端分别铰接另一个转接板14一端,且其另一端铰接短拉板19,短拉板19与转台铰接。
[0046]
求得人字架后拉板拉力f1,可根据公式f1=2f2,可求得力限器拉力f2,
[0047]
f2=f1/2。
[0048]
力限器拉力f2大小可转换为数据传递至驾驶室主面板进行显示
[0049]
实施例三:
[0050]
如图6、7所示的一种实施例,除上述实施例二中技术方案以外:本实施例三种将实施例二中第二单拉板13替换为一个力限器9。
[0051]
求得人字架后拉板拉力f1,可根据公式f1=2f2,可求得力限器拉力f2,
[0052]
f2=f1/2。
[0053]
力限器拉力f2大小可转换为数据传递至驾驶室主面板进行显示。
[0054]
本发明力限器放置在人字架根部,可有效减少起重机工作过程中风力以及钢丝绳自身振动等因素对力限器造成的干扰,数据受外界环境因素干扰降低,力值测算精准度高。
[0055]
本发明由于力限器放置在人字架根部,测量人字架后拉板所受拉力,人字架后拉板所受拉力由力限器与单拉板共同承担,受力较小,可选型小规格力限器,节约成本。
[0056]
本发明通过力限器放置在人字架根部,避免安装上部时,线缆空间缠绕,转台空间利用率提升,优化线缆布局,降低成本,同时增强美观性,同时维修便利性提升。
[0057]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1