一种龙门举升机及其工作方法与流程
1.本发明涉及举升机设备领域,具体涉及一种龙门举升机及其工作方法。
背景技术:
2.龙门举升机主要是通过四个水平托臂的同步上下运动来实现对物体的平稳托举,龙门举升机的四个水平托臂,需要根据不同物体选择不同的张开角度;这样就需要托臂具有可调角度摆动功能,并且在调整角度后通过锁定装置对托臂进行锁定,要求锁定结构稳定、可靠。现有的龙门举升机,其锁定装置普遍需要先调整托臂张开角度,然后人工对托臂进行锁定,但是在发现托臂张开角度不合适时,要先对解除托臂锁定然后在调整托臂,锁定以及解除锁定过程十分麻烦,并且因为时人工进行锁定,极易发生因为人为因素导致的托臂锁定不牢固,甚至未锁定的情况,造成支臂的摆动,从而发生危险。。
技术实现要素:
3.因此,针对上述的问题,本发明提出一种龙门举升机及其工作方法。
4.为实现上述目的,本发明的技术方案是提供了一种龙门举升机,包括两个立柱、设于所述两个立柱上端之间的横梁、可滑动设于所述立柱上的内滑台、设于所述立柱上用于带动所述内滑台在所述立柱上升降的升降装置、可转动设于所述内滑台上用于承载物体的两个托臂,还包括设于所述托臂与所述内滑台之间用于在内滑台带动托臂上升过程中锁定托臂以限制托臂在内滑台上转动并在内滑台带动所述托臂下降后与地面接触时解除锁定的转动辅助装置、设于其中一个所述立柱一侧用于与所述转动辅助装置和升降装置电性连接的控制装置。
5.进一步改进的是:所述转动辅助装置包括设于所述托臂上的转轴架、一端转动设于所述转轴架上的锁齿条、设于所述内滑台上用于与所述锁齿条配合在内滑台带动托臂上升过程中锁定锁齿条以锁定托臂限制托臂在内滑台上转动并在内滑台带动所述托臂下降后与地面接触时解除锁定的锁定组件、设于所述内滑台上用于检测锁定组件是否锁定托臂的托臂检测装置。
6.进一步改进的是:所述锁定组件包括设于所述内滑台上的转板、竖直开设于所述转板上的滑动孔、可滑动设于所述转板上位于滑动孔处的锁定柱、开设于锁定柱上用于供所述锁齿条另一端穿过的贯穿孔、设于所述锁定柱上位于贯穿孔处用于与锁齿条配合的锁定齿、设于所述转板与所述锁定柱之间用于在内滑台带动托臂上升过程中驱动锁定柱带动锁定齿与锁齿条啮合以锁定托臂并在内滑台带动托臂下降后锁定柱与地面接触时锁定齿与锁齿条分离的驱动件。
7.进一步改进的是:所述转板上位于驱动件外部设有用于防止外部物体碰撞驱动件的保护套。
8.进一步改进的是:所述驱动件包括穿设于所述锁定柱上位于转板下方的定位销、设于所述锁定柱外部位于所述转板与所述定位销之间的弹性件。
9.进一步改进的是:所述弹性件为压缩弹簧。
10.进一步改进的是:所述托臂检测装置包括设于所述内滑台上的安装板、设于所述安装板上位于锁定柱上方用于在锁定柱上移至锁定齿与锁齿条分离时与锁定柱接触以感应锁定齿与锁齿条未啮合锁定托臂的感应件、设于所述安装板上位于感应件外部用于防止外部物体碰撞感应件的保护盒盖。
11.进一步改进的是:所述内滑台包括可滑动设于所述立柱上的内滑台主体、设于所述内滑台主体上用于与两个托臂转动连接的转动架。
12.进一步改进的是:所述立柱上设有用于在升降装置带动内滑台主体在所述立柱上升降至预定位置后对内滑台主体进行锁定的升降辅助装置,所述升降辅助装置与控制装置电性连接。
13.进一步改进的是:所述升降辅助装置包括从上至下均匀设于所述内滑台主体上的若干个锁孔、设于所述立柱上的转动座、可转动设于所述转动座上用于与所述锁孔配合的的锁舌、开设于所述立柱上用于供所述锁舌穿过与所述锁孔配合的配合孔、设于所述立柱上用于在升降装置带动内滑台主体在所述立柱上升降至预定位置后驱动所述锁舌与内滑台主体上相对应锁孔配合以锁定内滑台主体的驱动组件、设于所述锁舌与所述立柱之间用于检测锁舌是否锁定内滑台主体的锁舌检测装置。
14.进一步改进的是:所述立柱上位于所述锁舌、驱动组件与锁舌检测装置外部设有保护罩。
15.进一步改进的是:所述锁舌检测装置包括设于所述锁舌上的压板、设于所述立柱上用于在驱动组件驱动所述锁舌与内滑台主体上相对应锁孔配合时与压板接触以感应内滑台主体锁定的锁舌限位开关。
16.进一步改进的是:所述托臂上远离内滑台的一端设有用于在托臂承载物体时增大所述托臂接触面积的托盘。
17.进一步改进的是:所述托盘上设有与控制装置电性连接用于在托臂承载物体时测量托臂所承载物体重量的重量传感器。
18.进一步改进的是:所述控制装置可为工控一体机。
19.本发明的技术方案还提供了一种龙门举升机的工作方法,包括如下步骤:1)抬升:1.1)检查内滑台是否位于最低点,未位于最低点时通过工控一体机启动升降装置驱动内滑台带动托臂降至最低点,此时锁定柱抵顶地面使得锁定柱上移,锁定齿与锁齿条解除啮合,锁定柱上端接触感应件,工控一体机接收感应件信号显示托臂未锁定;1.2)在托臂未锁定状态下人工将各托臂调整至所需位置后,将物体放置于托臂上预定位置,确认各托臂调整位置是否准确;1.3)确认后通过工控一体机启动上升程序,升降装置驱动内滑台带动托臂将物体抬升至锁定柱离开地面的高度,锁定柱受弹性件驱动带动锁定齿与锁齿条啮合以锁定托臂,此时锁定柱不再接触感应件,工控一体机接收感应件信号显示托臂锁定,如果在抬升后工控一体机未接收到感应件发出的托臂锁定信号时,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;1.4)当工控一体机接收感应件信号显示托臂锁定后,位于各个托臂上的重量传感
器开始检测所抬升物体并将数据传输至工控一体机,工控一体机根据各个重量传感器所测得的重量数值大小判断所抬升物体在托臂上是否平衡;1.5)各个重量传感器所测得数值的差值小于预设平衡允许差值范围并且托臂处于锁定状态,工控一体机将控制升降装置继续驱动内滑台带动托臂将物体抬升至预定工作高度,工控一体机持续监测托臂是否处于锁定状态,当出现托臂解除锁定状态情况,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;如果各个重量传感器所测得数值的差值大于预设平衡允许差值范围,工控一体机将发出警报并控制升降装置驱动内滑台带动托臂将物体降回最低点,人工重新调整各托臂位置;1.6)当工控一体机控制升降装置继续驱动内滑台带动托臂将物体抬升至预定工作高度后,工控一体机控制驱动组件驱动锁舌与相对应锁孔配合以锁定内滑台,在锁舌与相对应锁孔配合以锁定内滑台时锁舌上的压板接触锁舌限位开关,工控一体机接收锁舌限位开关信号显示内滑台已锁定,龙门举升机进入承载状态,此时工作人员可进入工作,工控一体机持续监测锁舌是否处于锁定状态,当出现锁舌解除锁定状态情况,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;如果工控一体机未接收到锁舌限位开关已锁定信号,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;2)下降:2.1)人工作人员退出工作区域,通过工控一体机启动下降程序,驱动组件驱动锁舌与相对应锁孔解除配合以解除对内滑台的锁定,锁舌上的压板不再接触锁舌限位开关,工控一体机接收锁舌限位开关发出的解除锁定信号,升降装置将驱动内滑台带动托臂将物体下降至最低点,完成下降,下降过程中工控一体机持续监测锁舌是否处于未锁定状态,如有异常工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;当工控一体机未接收到锁舌限位开关发出的解除锁定信号,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修。
20.本发明具有以下有益效果:1、本发明通过设置转动辅助装置,使得托臂在完成张开角度调节后,当托臂被带动上升时可通过锁定组件自动完成托臂的锁定,减少因人为因素导致的危险,并且在托臂下降后锁定组件与地面接触时可自动解除锁定,相对于人工锁定,更加便利,大大提高工作效率,还通过设置托臂检测装置检测锁定组件是否锁定托臂,对工作人员起到提示作用,提高了龙门举升机运行时的安全性。
21.2、本发明通过升降辅助装置在内滑台在立柱上升降至预定位置后自动对内滑台进行锁定,并且还通过锁舌检测装置检测内滑台是否被锁定,对工作人员起到提示作用,进一步提高了龙门举升机运行时的安全性。
附图说明
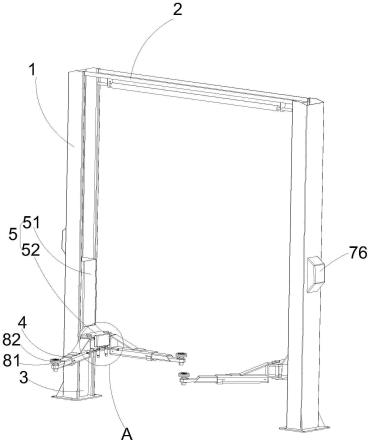
22.图1为本发明的结构示意图;图2为图1中a处的放大图;图3为转动辅助装置的部分结构示意图;
图4为锁孔在内滑台主体上的结构示意图;图5为升降辅助装置的部分结构示意图。
具体实施方式
23.下面结合附图和实施例,对本发明的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
24.参考图1至图5所示,参考图1所示,一种龙门举升机,包括两个立柱1、设于所述两个立柱1上端之间的横梁2、可滑动设于所述立柱1上的内滑台5、设于所述立柱1上用于带动所述内滑台5在所述立柱上升降的升降装置3、可转动设于所述内滑台5上用于承载物体的两个托臂4,所述升降装置3可为油缸或液压缸;还包括设于所述托臂4与所述内滑台之间用于在内滑台5带动托臂上升过程中锁定托臂4以限制托臂4在内滑台上转动并在内滑台5带动所述托臂4下降后与地面接触时解除锁定的转动辅助装置、设于其中一个所述立柱一侧用于与所述转动辅助装置和升降装置电性连接的控制装置(图中未示出),所述控制装置(图中未示出)可为工控一体机;所述转动辅助装置包括设于所述托臂4上的转轴架41、一端转动设于所述转轴架41上的锁齿条42、设于所述内滑台5上用于与所述锁齿条42配合在内滑台5带动托臂4上升过程中锁定锁齿条42以锁定托臂4限制托臂4在内滑台上转动并在内滑台5带动所述托臂4下降后与地面接触时解除锁定的锁定组件、设于所述内滑台上用于检测锁定组件是否锁定托臂4的托臂检测装置;所述锁定组件包括设于所述内滑台上的转板43、竖直开设于所述转板43上的滑动孔(图中未示出)、可滑动设于所述转板43上位于滑动孔(图中未示出)处的锁定柱44、开设于锁定柱44上用于供所述锁齿条42另一端穿过的贯穿孔45、设于所述锁定柱44上位于贯穿孔45处用于与锁齿条42配合的锁定齿46、设于所述转板43与所述锁定柱44之间用于在内滑台带动托臂4上升过程中驱动锁定柱44带动锁定齿46与锁齿条42啮合以锁定托臂4并在内滑台5带动托臂4下降后锁定柱44与地面接触时锁定齿46与锁齿条42分离的驱动件,所述转板43上位于驱动件外部设有用于防止外部物体碰撞驱动件的保护套47;所述驱动件包括穿设于所述锁定柱44上位于转板43下方的定位销48、设于所述锁定柱44外部位于所述转板43与所述定位销48之间的弹性件49,所述弹性件49为压缩弹簧。
25.所述托臂检测装置包括设于所述内滑台5上的安装板61、设于所述安装板61上位于锁定柱44上方用于在锁定柱44上移至锁定齿46与锁齿条42分离时与锁定柱46接触以感应锁定齿46与锁齿条42未啮合锁定托臂4的感应件62(限位开关)、设于所述安装板61上位于感应件62外部用于防止外部物体碰撞感应件62的保护盒盖63,所述感应件62可为限位开关;所述内滑台5包括可滑动设于所述立柱1上的内滑台主体51、设于所述内滑台主体51上用于与两个托臂4转动连接的转动架52;升降装置3在驱动内滑台主体51带动转动架52上升过程中通过设置转动辅助装置锁定托臂4以限制托臂4在转动架52上转动,并在升降装置3在驱动内滑台主体51带动转动架52下降至与地面接触时转动辅助装置解除对托臂4的锁定;所述立柱1上设有用于在升降装置带动内滑台主体51在所述立柱1上升降至预定
位置后对内滑台主体51进行锁定的升降辅助装置,升降辅助装置与控制装置(图中未示出)电性连接,所述升降辅助装置包括从上至下均匀设于所述内滑台主体51上的若干个锁孔71、设于所述立柱1上的转动座72、可转动设于所述转动座72上用于与所述锁孔71配合的的锁舌73、开设于所述立柱1上用于供所述锁舌73穿过与所述锁孔71配合的配合孔74、设于所述立柱1上用于在升降装置带动内滑台主体51在所述立柱1上升降至预定位置后驱动所述锁舌73与内滑台主体51上相对应锁孔71配合以锁定内滑台主体51的驱动组件75、设于所述锁舌73与所述立柱1之间用于检测锁舌73是否锁定内滑台主体51的锁舌检测装置,所述驱动组件75可采用电缸或气缸,所述驱动组件75固定端与立柱1连接,可采用铰接或其他方式进行连接,连接方式图中未示出,所述驱动组件75伸缩端与所述锁舌73铰接;所述立柱1上位于所述锁舌73、驱动组件75与锁舌检测装置外部设有保护罩76。
26.所述锁舌检测装置包括设于所述锁舌73上的压板77、设于所述立柱1上用于在驱动组件75驱动所述锁舌73与内滑台主体51上相对应锁孔71配合时与压板77接触以感应内滑台主体51锁定的锁舌限位开关78;所述托臂4上远离内滑台5的一端设有用于在托臂承载物体时增大所述托臂4接触面积的托盘81,所述托盘81上设有与控制装置(图中未示出)电性连接用于在托臂4承载物体时测量托臂4所承载物体重量的重量传感器82。
27.一种龙门举升机的工作方法,包括如下步骤:1)抬升:1.1)检查内滑台5是否位于最低点,未位于最低点时通过工控一体机启动升降装置3驱动内滑台5带动托臂4降至最低点,此时锁定柱44抵顶地面使得锁定柱44上移,锁定齿46与锁齿条42解除啮合,锁定柱44上端接触感应件62,工控一体机接收感应件62信号显示托臂4未锁定;1.2)在托臂4未锁定状态下人工将各托臂4调整至所需位置后,将物体放置于托臂4上预定位置,确认各托臂4调整位置是否准确;1.3)确认后通过工控一体机启动上升程序,升降装置3驱动内滑台5带动托臂4将物体抬升至锁定柱44离开地面的高度,锁定柱44受弹性件49驱动带动锁定齿46与锁齿条42啮合以锁定托臂4,此时锁定柱44不再接触感应件62,工控一体机接收感应件62信号显示托臂4锁定,如果在抬升后工控一体机未接收到感应件62发出的托臂4锁定信号时,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;1.4)当工控一体机接收感应件62信号显示托臂4锁定后,位于各个托臂4上的重量传感器82开始检测所抬升物体并将数据传输至工控一体机,工控一体机根据各个重量传感器82所测得的重量数值大小判断所抬升物体在托臂4上是否平衡;1.5)各个重量传感器82所测得数值的差值小于预设平衡允许差值范围并且托臂4处于锁定状态,工控一体机将控制升降装置3继续驱动内滑台5带动托臂4将物体抬升至预定工作高度,工控一体机持续监测托臂4是否处于锁定状态,当出现托臂4解除锁定状态情况,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;如果各个重量传感器82所测得数值的差值大于预设平衡允许差值范围,工控一体机将发出警报并控制升降装置3驱动内滑台5带动托臂4将物体降回最低点,人工重新调整各托臂位置;
1.6)当工控一体机控制升降装置3继续驱动内滑台5带动托臂4将物体抬升至预定工作高度后,工控一体机控制驱动组件75驱动锁舌73与相对应锁孔71配合以锁定内滑台5,在锁舌73与相对应锁孔71配合以锁定内滑台5时锁舌73上的压板77接触锁舌限位开关78,工控一体机接收锁舌限位开关78信号显示内滑台5已锁定,龙门举升机进入承载状态,此时工作人员可进入工作,工控一体机持续监测锁舌73是否处于锁定状态,当出现锁舌73解除锁定状态情况,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;如果工控一体机未接收到锁舌73限位开关已锁定信号,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;2)下降:2.1)人工作人员退出工作区域,通过工控一体机启动下降程序,驱动组件75驱动锁舌73与相对应锁孔71解除配合以解除对内滑台5的锁定,锁舌73上的压板77不再接触锁舌限位开关78,工控一体机接收锁舌限位开关78发出的解除锁定信号,升降装置3将驱动内滑台5带动托臂4将物体下降至最低点,完成下降,下降过程中工控一体机持续监测锁舌73是否处于未锁定状态,如有异常工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修;当工控一体机未接收到锁舌限位开关78发出的解除锁定信号,工控一体机将发出警报并控制龙门举升机停止运行,进行人工检修。
28.以上显示和描述了本发明的基本原理和主要特征及其优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1