用于装配式预制构件的吊装及定位设备的制作方法
1.本技术属于建筑吊装施工领域,具体涉及一种用于装配式预制构件的吊装及定位设备。
背景技术:
2.随着建筑技术和材料的不断发展与进步,预制装配式建筑得到了广泛的应用。目前在许多建筑工业化发达的国家,预制装配式建筑经历了长期的实验和应用,现代化的预制装配式建筑产品已经可以高度集成建筑的各种功能,而且建筑的形式和构件非常精致。
3.我国建设需求量大、建设速度快,很有必要发展装配式预制建筑,并且建筑行业已经开始重视对装配式预制建筑的应用。预制构件是指按照设计规格在工厂或现场预先制成混凝土构件,再通过吊车、塔吊等起吊设备吊运至安装位置进行装配,由于其安装精度高,通过塔吊吊车等进行吊运以及定位安装时,现场的调整与指挥难度大,有的时候甚至需要工人通过推拉、撬棍等方式对其进行定位安装。因此,如何使吊运预制构件在吊运以及安装过程中的调整更加简单准确、操作更加安全便捷、作业效率更高是目前本领域技术人员亟需解决的技术问题。
4.申请内容
5.为至少在一定程度上克服相关技术中存在的问题,本技术提供了一种用于装配式预制构件的吊装及定位设备。
6.根据本技术实施例,本技术提供了一种用于装配式预制构件的吊装及定位设备,其包括起吊板、控制器、重心调整机构、辅助升降机构和倾角调整机构;所述起吊板用于与起吊设备连接,所述起吊板上设置有所述控制器,所述控制器与重心调整机构、辅助升降机构和倾角调整机构连接,用于控制所述重心调整机构、辅助升降机构和倾角调整机构工作;
7.所述重心调整机构设置在所述起吊板的底部,其用于调整所述预制构件在吊运过程中的重心;所述辅助升降机构设置在所述重心调整机构的下方,其用于对所述预制构件在吊运过程中进行升降;所述倾角调整机构与预制构件连接,用于调整所述预制构件在安装装配时与安装面的垂直度。
8.上述用于装配式预制构件的吊装及定位设备中,所述重心调整机构包括驱动组件、滑槽、滑块和丝杠;在所述起吊板的下表面上,沿所述起吊板的周向,自靠近所述起吊板的底部中心处向外均匀间隔开设有两条及以上所述滑槽;沿所述滑槽的长度方向,在所述滑槽中设置有所述丝杠,所述丝杠的两端分别对应与所述滑槽处所述起吊板的侧壁转动连接;所述丝杠上设置有所述滑块,所述滑块与辅助升降机构连接;所述驱动组件与控制器和丝杠连接,其用于驱动所述丝杠转动。
9.进一步地,所述驱动组件包括电动马达和齿轮,所述电动马达与控制器电连接;所述丝杠的一端设置有所述齿轮,所述电动马达的输出轴采用与所述齿轮啮合的齿轮轴。
10.进一步地,所述辅助升降机构包括拉力传感器、第一电动卷扬机和第一螺杆;所述拉力传感器固定连接在所述滑块位于所述滑槽外部的端面上,所述拉力传感器与滑块连接
一端的相对端固定连接有所述第一电动卷扬机,所述拉力传感器和第一电动卷扬机均与所述控制器连接;
11.所述第一电动卷扬机中设置有吊绳,所述吊绳的伸出端连接有所述第一螺杆,所述第一螺杆用于与预制构件固定连接。
12.上述用于装配式预制构件的吊装及定位设备中,所述倾角调整机构包括第二电动卷扬机、定位块、滑轮、芯轴、倾角仪、固定组件和锁止组件;
13.所述第二电动卷扬机设置在所述起吊板上,所述第二电动卷扬机中设置有拉绳,所述拉绳的固定端与所述第二电动卷扬机固定连接,其伸出端用于通过所述固定组件与预制构件的安装位置连接;
14.所述定位块中设置有所述滑轮,所述滑轮的中心设置有与之转动连接的所述芯轴,所述芯轴的两端分别对应与所述定位块的两相对侧壁固定连接;所述拉绳绕设在所述滑轮后从所述定位块中向外伸出;
15.所述定位块中还设置有所述锁止组件,所述锁止组件用于限制所述滑轮的转动和所述拉绳的滑动;
16.在与所述芯轴平行的所述定位块的内壁上固定设置有所述倾角仪,所述倾角仪用于检测所述定位块的倾斜程度,并将检测到的倾斜程度转化为电信号后传递给所述控制器;
17.所述定位块可拆卸地安装在所述预制构件的侧壁上。
18.进一步地,所述固定组件包括固定块、第二螺杆和螺母;所述拉绳的伸出端与所述固定块连接,所述固定块通过所述第二螺杆和螺母与所述预制构件的安装位置可拆卸连接。
19.进一步地,所述锁止组件包括卡块、弹簧、电动伸缩杆、上长连杆、下长连杆和短连杆;所述卡块设置在所述滑轮远离所述倾角仪的一侧,所述卡块远离所述滑轮的一侧与所述定位块的内壁之间设置有所述弹簧;
20.所述卡块靠近所述滑轮一侧的上端铰接有所述上长连杆,下端铰接有所述下长连杆,所述上长连杆和下长连杆对称设置;所述上长连杆和下长连杆之间设置有所述短连杆,所述短连杆的两端分别对应与所述上长连杆和下长连杆铰接;所述短连杆远离所述卡块的一侧设置有所述电动伸缩杆,所述电动伸缩杆的一端与所述倾角仪所在的所述定位块的内壁固定连接,其另一端与所述短连杆长度方向的中部铰接;
21.所述电动伸缩杆与控制器电连接,所述控制器用于控制所述电动伸缩杆伸缩,以使得所述卡块通过所述滑轮对所述拉绳进行锁定或解除锁定。
22.上述用于装配式预制构件的吊装及定位设备中,所述起吊板的顶面上均匀间隔设置有第一吊环,所述第一吊环用于与起吊设备连接。
23.进一步地,在所述起吊板的顶部可拆卸地连接有一外壳,所述外壳的顶部开设有第三通孔,所述第一吊环从所述第三通孔中伸出。
24.更进一步地,所述起吊板的顶部还设置有移动电源,所述移动电源与控制器连接;所述外壳的顶面上还设置有太阳能发电板,所述太阳能发电板与移动电源电连接。
25.根据本技术的上述具体实施方式可知,至少具有以下有益效果:本技术提供的用于装配式预制构件的吊装及定位设备中通过设置起吊板、控制器、重心调整机构、辅助升降
机构和倾角调整机构;起吊板用于与起吊设备连接,控制器用于控制重心调整机构、辅助升降机构和倾角调整机构工作;重心调整机构用于调整预制构件在吊运过程中的重心;辅助升降机构用于对预制构件在吊运过程中进行升降;倾角调整机构与预制构件连接,用于调整预制构件在安装装配时与安装面的垂直度;在作业过程中,既能够降低现场施工人员的劳动强度,也能够简化远程操控吊装设备的操作过程,还能够提高预制构件的装配效率,使吊运预制构件在吊运以及安装过程中的调整更加简单准确、操作更加安全便捷、作业效率更高。
26.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本技术所欲主张的范围。
附图说明
27.下面的所附附图是本技术的说明书的一部分,其示出了本技术的实施例,所附附图与说明书的描述一起用来说明本技术的原理。
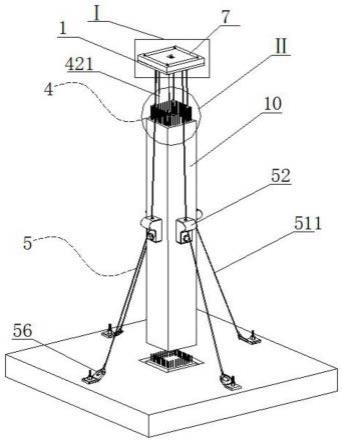
28.图1为本技术具体实施方式提供的一种用于装配式预制构件的吊装及定位设备在使用状态的立体结构示意图。
29.图2为本技术具体实施方式提供的一种用于装配式预制构件的吊装及定位设备的主视图。
30.图3为本技术具体实施方式提供的一种用于装配式预制构件的吊装及定位设备使用状态时的仰视图。
31.图4为图1中第ⅰ部分的结构示意图。
32.图5为图1中第ⅱ部分的结构示意图。
33.图6为图2中第ⅲ部分的结构示意图。
34.图7为图3中第ⅳ部分的结构示意图。
35.图8为图7的侧视图。
36.附图标记说明:
37.1、起吊板;11、第一吊环;12、起吊柱;13、第二通孔;
38.2、控制器;
39.3、重心调整机构;31、滑槽;32、滑块;321、第一通孔;33、丝杠;
40.4、辅助升降机构;41、拉力传感器;42、第一电动卷扬机;421、吊绳;43、第一螺杆;
41.5、倾角调整机构;51、第二电动卷扬机;511、拉绳;52、定位块;521、螺栓;53、滑轮;54、芯轴;55、倾角仪;56、固定组件;561、固定块;562、第二螺杆;563、螺母;57、锁止组件;571、卡块;572、弹簧;573、电动伸缩杆;574、上长连杆;575、下长连杆;576、短连杆;
42.6、移动电源;
43.7、外壳;71、第三通孔;72、太阳能发电板;
44.10、预制立柱。
具体实施方式
45.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例
中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
46.如图1~图8所示,本技术实施例提供的用于装配式预制构件的吊装及定位设备包括起吊板1、控制器2、重心调整机构3、辅助升降机构4和倾角调整机构5。其中,起吊板1用于与起吊设备连接,起吊板1上设置有控制器2,控制器2与重心调整机构3、辅助升降机构4和倾角调整机构5连接,用于控制重心调整机构3、辅助升降机构4和倾角调整机构5工作。重心调整机构3设置在起吊板1的底部,其用于调整预制构件在吊运过程中的重心。辅助升降机构4设置在重心调整机构3的下方,其用于对预制构件在吊运过程中进行升降。倾角调整机构5与预制构件连接,用于调整预制构件在安装装配时与安装面的垂直度。
47.起吊板1的形状可以根据吊装时的预制构件的形状进行设计,本实施方式以预制立柱10的吊装及定位为例进行说明,所以对应的将起吊板1的外观形状设计为方形,以便于吊装时的安装以及使用。
48.在一些具体的实施例中,如图4所示,可以在起吊板1的顶面上均匀间隔设置多个第一吊环11。第一吊环11用于与起吊设备的吊绳或者吊钩连接,其形状可以设置为圆形、椭圆形、半椭圆形等其他利于安装和锁扣的形状。在本技术实施例中,第一吊环11优选地采用半圆形。半圆形的结构在起吊时使第一吊环11受力更加均匀,可以防止在起吊时发生变形。
49.在本技术实施例中,如图4所示,第一吊环11设置为五个,具体地,沿起吊板1的周向均匀设置四个第一吊环11,在起吊板1的中心处设置有一个第一吊环11。在不同的使用状况下可以通过不同的第一吊环11对本技术吊装及定位设备进行调运。例如,在不负载的情况下,将本技术吊装及定位设备从高处吊运至低处时,可以只选用位于起吊板1中心处的一个第一吊环11进行吊运。在吊装预制构件时,可以采用沿起吊板1的周向均匀设置的四个第一吊环11进行吊运,以确保在安全的前提下高效作业。
50.第一吊环11通过起吊柱12与起吊板1连接。具体地,第一吊环11与起吊柱12的一端固定连接,起吊柱12的另一端外壁上设置有螺纹,在起吊板1上与起吊柱12对应的位置开设有螺纹孔,起吊柱12的另一端旋接在螺纹孔中,再通过焊接对起吊柱12与起吊板1进行加固,以防止其在使用过程中螺纹松动而造成安全事故。
51.在本技术实施例中,如图4所示,起吊板1的顶部还设置有移动电源6,移动电源6与控制器2连接,用于为控制器2提供电能。移动电源6内部设置有蓄电池和转换电路,蓄电池提供电能,转换电路可以将蓄电池的电流、电压转换成本技术中各电器件所需要的电压与电流,还能通过匹配的充电器将外部的电能存储到蓄电池中。
52.具体地,控制器2包括控制模块和信号收发模块,控制模块通过信号收发模块与外部移动终端进行无线通信。
53.在一个具体的实施例中,如图7和图8所示,重心调整机构3包括驱动组件(图中未示出)、滑槽31、滑块32和丝杠33。其中,在起吊板1的下表面上,沿起吊板1的周向,自靠近起吊板1的底部中心处向外均匀间隔开设有两条及以上滑槽31。例如,在起吊板1的下表面上开设有四条中心对称的滑槽31。沿滑槽31的长度方向,在滑槽31中设置有丝杠33,丝杠33的两端分别对应与滑槽31处起吊板1的侧壁转动连接。丝杠33上设置有滑块32,滑块32与辅助升降机构4连接。驱动组件与控制器2和丝杠33连接,其用于驱动丝杠33转动。
54.具体地,滑块32中开设有第一通孔321,第一通孔31中滑块32的壁面上设置有螺旋
结构,滑块32通过螺旋结构与丝杠33匹配连接。
55.驱动组件包括电动马达和齿轮,其中,电动马达设置在起吊板1的下表面上,其与控制器2电连接。丝杠33的一端设置有齿轮,电动马达的输出轴采用与齿轮啮合的齿轮轴。
56.当控制器2控制电动马达转动时,电动马达驱动丝杠33转动,使得滑块32移动至所需的位置,进而使得滑块32通过辅助升降机构4连接的预制构件的中心调整到起吊板1的正中间的下方,确保预制构件在吊运过程中的安全性和稳定性。
57.在一个具体的实施例中,如图5~图8所示,辅助升降机构4包括拉力传感器41、第一电动卷扬机42和第一螺杆43。其中,拉力传感器41固定连接在滑块32位于滑槽31外部的端面上,拉力传感器41与滑块32连接一端的相对端固定连接有第一电动卷扬机42,拉力传感器41和第一电动卷扬机42均与控制器2连接。第一电动卷扬机42中设置有吊绳421,吊绳421的伸出端连接有第一螺杆43,第一螺杆43用于与预制构件固定连接。
58.拉力传感器41用于检测预制构件在吊运过程中产生的拉力值,并将该拉力值传送给控制器2,由控制器2根据该拉力值控制电动马达转动。
59.具体地,第一螺杆43上设置有第二吊环,吊绳421的伸出端与第二吊环连接。
60.在一个具体的实施例中,如图3、图4和图6所示,倾角调整机构5包括第二电动卷扬机51、定位块52、滑轮53、芯轴54、倾角仪55、固定组件56和锁止组件57。
61.其中,第二电动卷扬机51设置在起吊板1上,第二电动卷扬机51中设置有拉绳511。具体地,第二电动卷扬机51可以设置在起吊板1的顶面上,绕起吊板1的周向,在起吊板1上均匀间隔开设有多个第二通孔13,优选地,第二通孔13的数量设置为偶数。拉绳511的固定端与第二电动卷扬机51固定连接,其伸出端从第二通孔13中穿出后用于通过固定组件56与预制构件的安装位置连接。
62.定位块52中设置有滑轮53,滑轮53的中心设置有与之转动连接的芯轴54,芯轴54的两端分别对应与定位块52的两相对侧壁固定连接。拉绳511绕滑轮53一圈后经定位块52的中部斜向向外伸出。定位块52中还设置有锁止组件57,锁止组件57用于限制滑轮53的转动和拉绳511的滑动。
63.在与芯轴54平行的定位块52的内壁上固定设置有高精度的倾角仪55,倾角仪55用于检测定位块52的倾斜程度,并将检测到的倾斜程度转化为电信号后传递给控制器2。
64.定位块52通过螺栓521可拆卸地安装在预制构件的侧壁上,其中,螺栓521和倾角仪55设置在定位块52的同一内壁上。
65.具体地,如图1和图2所示,固定组件56包括固定块561、第二螺杆562和螺母563。其中,拉绳511的伸出端通过锁扣与固定块561连接,固定块561通过第二螺杆562和螺母563与预制构件的安装位置可拆卸连接。
66.具体地,如图6所示,锁止组件57包括卡块571、弹簧572、电动伸缩杆573、上长连杆574、下长连杆575和短连杆576。其中,卡块571设置在滑轮53远离倾角仪55的一侧,卡块571远离滑轮53的一侧与定位块52的内壁之间设置有若干弹簧572。卡块571靠近滑轮53一侧的上端铰接有上长连杆574,下端铰接有下长连杆575,上长连杆574和下长连杆575对称设置。上长连杆574和下长连杆575之间设置有短连杆576,短连杆576的两端分别对应与上长连杆574和下长连杆575铰接。短连杆576远离卡块571的一侧设置有电动伸缩杆573,电动伸缩杆573的一端与倾角仪55所在的定位块52的内壁固定连接,其另一端与短连杆576长度方向的
中部铰接。电动伸缩杆573与控制器2电连接,控制器2用于控制电动伸缩杆573伸缩,以使得卡块571通过滑轮53对拉绳511进行锁定或解除锁定。
67.在一个具体的实施例中,如图1所示,在起吊板1的顶部可拆卸地连接有一外壳7,外壳7的顶部开设有第三通孔71,以便于第一吊环11可以从第三通孔71中伸出,便于外部起吊设备对第一吊环11进行锁扣。外壳7的设置能够有效地防止外部的灰尘、雨水等进入起吊板1内部而影响内部零部件的使用寿命。
68.在外壳7的顶面上还设置有太阳能发电板72,太阳能发电板72与移动电源6电连接。在户外作业时,太阳能发电板72能够将太阳能转化为电能持续为移动电源6进行充电,以便移动电源6在使用过程中有足够的电量。
69.下面以预制构件采用预制立柱10为例,对本技术实施例提供的用于装配式预制构件的吊装及定位设备的使用过程进行具体说明。
70.首先,将吊绳421的伸出端连接的第一螺杆43通过螺纹连接固定安装于预制构件的预留吊装螺纹孔中;其次,将外部起吊设备的吊钩或钢丝绳锁扣于拉环的环内,检查确认无误后将预制立柱10立起来;再次,检查拉环以及第一螺杆43与预制立柱10的连接处是否完好;最后,通过螺栓将定位块52固定安装在预制立柱10的侧壁上。安装完成后进行吊运,吊运过程中采用慢起、快升、缓放的操作方式。
71.在慢起的过程中,现场指挥人员通过移动终端控制启动本技术实施例提供的用于装配式预制立柱10的吊装及定位设备,拉力传感器41检测预制立柱10在吊运过程中产生的拉力值,并将拉力值转换为电信号传送至控制器2,控制器2根据接收到的对应拉力大小的电信号发出控制电动马达转动的信号。电动马达驱动丝杠33转动,驱使滑块32移动至合适的位置,以使各拉力传感器41所受的拉力值相等,该过程即将所吊装的预制立柱10的重心自动调整到起吊板1的正下方。该重心调整过程既能确保吊运过程中的安全性和稳定性,又能减少驾驶吊运设备的司机在操作过程中进行调整的时间,从而提高吊运效率。
72.当预制立柱10被吊运至安装位置的上方距离安装位置大约1.5m时,外部的吊运设备直接悬停即可,工作人员通过移动终端操作,使控制器2控制第一电动卷扬机42慢速调整吊绳421整体下降。当预制立柱10到达安装位置的上方适当的位置时,工作人员通过移动终端操作,使控制器2控制相应的第二电动卷扬机51收紧拉绳511,拉绳511拉紧相应的预制立柱10的某一个或两个侧面,使预制立柱10发生小幅度的倾斜,确保安装位置地面预留插筋与预制立柱10预留注浆管逐根对应并能够全部准确插入注浆管后,再利用控制器2控制各第一电动卷扬机42慢速调整吊绳421整体伸出,使预制立柱10缓慢下降。本技术采用倾角调整机构5调整预制立柱10的倾斜度,既能够减少工人通过人工进行反复多次调整的时间,还能够避免人工在调整过程中存在的安全隐患,减少工人的劳动强度。
73.当预制立柱10下降至距离安装位置约30cm时,工作人员通过移动终端操作,使控制器2控制第二电动卷扬机51放松拉绳511,同时工作人员通过移动终端操作,使控制器2控制电动伸缩杆573伸出以解除定位块52对拉绳511的锁定,再引导拉绳511端部的固定块561,将固定块561通过第二螺杆562和螺母563固定锁装在安装位置的外侧。
74.工作人员通过移动终端操作,使控制器2控制各第一电动卷扬机42慢速调整吊绳421整体下降,当预制立柱10底部与安装位置距离约30cm空隙时,使用1mm~10mm不同厚度的垫铁垫于预制立柱10底部与安装面之间,使预制立柱10底部与安装面保持20mm浇筑灌浆
料的空隙,确保灌浆料有较好的流动性的同时也能够确保预制立柱10安装就位后符合设计标高。
75.当预制立柱10落地之后,控制器2根据定位块52内部的高精度倾角仪55检测到的定位块52的倾斜程度,控制第二电动卷扬机51将对应的拉绳511收紧,确保预制立柱10安装之后与安装面的垂直度,控制器2控制电动伸缩杆573收回,再次使定位块52对拉绳511进行锁定;定位块52对拉绳511的锁止机构可以避免因电路故障或者电源断电的情况下自动锁紧拉绳511,避免拉绳511失控造成安全事故。
76.拉绳511锁定之后可取下吊环外侧的锁扣装置,以便于塔吊或吊车进行其他作业,将起吊板1暂放于预制立柱10的顶部,待预制立柱10的底部完成注浆并固化定型之后即可拆除本技术施例提供的用于装配式预制构件的吊装及定位设备。
77.在使用本技术实施例提供的用于装配式预制立柱10的吊装及定位设备的作业过程中,既能够降低现场施工人员的劳动强度,也能够简化远程操控吊装设备的操作过程,还能够提高预制立柱10的装配效率。使吊运预制立柱10在吊运以及安装过程中的调整更加简单准确、操作更加安全便捷、作业效率更高。
78.可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
79.需要说明的是,在本技术的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本技术的描述中,除非另有说明,“多个”的含义是指至少两个。
80.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
81.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1