一种菜品自动传输装置及方法与流程
1.本发明涉及菜品传输技术领域,具体为一种菜品自动传输装置及方法。
背景技术:
2.餐饮行业的人力成本是困扰经营者的一大难题。餐厅饭馆等餐饮场景当中涉及到许多人力环节,从点餐、下单、炒菜和送餐都需要人手去完成。但在客流高峰期,过少的人手会造成出餐慢、客户等不耐烦的情况;在客流淡季时,店员比顾客还多,过多的人手又会造成人员冗杂,支出收入与支出不成比例,人手调配是否合理会影响餐厅营收水平,针对这些问题,市面上出现了智能餐饮和无人餐饮等运行模式,由机械设备代替人工进行取餐、送餐,能够有效节省人力和成本。
3.现有的智能餐饮菜品传送方式为:由餐饮人员将做好的菜品放置在传送带上,利用传送带将做好的菜品送至取餐口,但是当出现多人点餐时,放置在传送带上的菜品回一起被传送,为了保证第一个未被及时取走的菜品仍静置在取餐口,后面做好的菜品只能等第一个做完的菜品被取走后才能继续取餐,这种菜品传输方式容易造成后面做完的菜品滞留在传送带上,增加取餐时间,影响后面点餐人员的用餐时间。
4.因此亟需设计一种菜品自动传输装置及系统来解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种菜品自动传输装置及系统,以解决上述背景技术中提出的在智能餐饮中先做好的菜品没被及时取走时,容易出现菜品滞留在传送带上的问题,从而增加取餐时间,影响后面人员用餐。
6.为实现上述目的,本发明提供如下技术方案:一种菜品自动传输装置,包括底板、竖板和智能机器人,其特征在于:所述底板与所述竖板连接,所述竖板上开设有三个或三个以上的取餐口,所述竖板一侧设置有第二滑轨和摄像模组,所述竖板另一侧设有红外传感器和操作屏,所述竖板上设置有警示灯,所述红外传感器的数量、所述警示灯的数量与所述取餐口的数量相匹配,所述摄像模组的数量为五个或五个以上,所述底板上设置有限位块,所述限位块上设置有支撑架,所述支撑架与第一滑轨连接,所述第一滑轨、所述第二滑轨上设置有用于传输菜品的传输组件,所述传输组件的数量为多个,所述传输组件可在所述第一滑轨、所述第二滑轨上相对滑动,所述传输组件上设置有放置菜品的放置组件,所述放置组件上设置有夹紧菜品的夹紧组件,所述传输组件一侧设置有用于松开所述夹紧组件的解锁组件,所述支撑架上设置有控制箱,所述控制箱与所述智能机器人、所述摄像模组、所述红外传感器、所述警示灯、所述操作屏、所述传输组件、所述解锁组件电性连接。
7.作为本发明一种优选方案,所述传输组件包括双轴减速电机、轮子、压力传感器、距离传感器,所述双轴减速电机的顶部设置有所述压力传感器,所述双轴减速电机右侧设置有所述距离传感器,所述双轴减速电机、所述压力传感器、所述距离传感器与所述控制箱电性连接,所述双轴减速电机上设置有输出轴,所述输出轴的数量为两个一组,所述输出轴
上设置有轮子。
8.作为本发明一种优选方案,所述放置组件包括导向框、滑块、第一弹簧、第一导向杆、放置盘、第二弹簧、定位块,所述双轴减速电机上设置有所述导向框,所述导向框内部设置有所述滑块和所述第一弹簧,所述滑块可在所述导向框上相对滑动,所述第一弹簧一端连接所述双轴减速电机另一端连接所述滑块,所述滑块上设置有滑槽,所述滑槽上设置有所述第一导向杆,所述放置盘滑动设置在所述第一导向杆上,所述第二弹簧一端连接所述放置盘另一端连接所述滑块,所述放置盘一侧设置有定位块。
9.作为本发明一种优选方案,所述夹紧组件的数量为两个一组,所述夹紧组件对称设置在所述放置盘上,所述夹紧组件包括第二导向杆、夹块、第三弹簧,所述第二导向杆与所述放置盘连接,所述夹块设置在所述第二导向杆上,所述第三弹簧一端连接所述夹块另一端连接所述第二导向杆,所述夹块可在所述第二导向杆上相对滑动。
10.作为本发明一种优选方案,所述解锁组件包括环形滑轨、电动推杆、楔形杆和连杆,所述环形滑轨与所述输出轴连接,所述环形滑轨上设置有连接架,所述连接架上设置有所述电动推杆,所述电动推杆与所述控制箱电性连接,所述电动推杆上设置有伸出杆,所述伸出杆与所述楔形杆连接,所述连杆设置在所述夹紧组件上。
11.作为本发明一种优选方案,所述摄像模组包括第一摄像模组、第二摄像模组、第三摄像模组、第四摄像模组、第五摄像模组,所述第二摄像模组、所述第三摄像模组、所述第四摄像模组设置在所述取餐口中点位置,所述第一摄像模组设置在所述竖板左侧,所述第五摄像模组设置在所述竖板右侧。
12.本发明还提供了一种菜品自动传输方法,适用于以上所述的一种菜品自动传输装置,包括以下步骤:s1、将摄像模组安装在竖板上,标定取餐区域和获取该装置的位置信息;s2、人们在操作屏上点餐后,由智能机器人将做完的菜品放置在放置盘上,夹紧组件将菜品进行夹紧,避免传送过程中发生摇晃导致菜品发生倾倒;s3、传输组件将菜品沿着取餐口方向传送,到达标定的取餐区域后传输组件停止运行,此时菜品刚好正对取餐口;s4、解锁组件将夹紧组件松开,松开夹紧组件的同时将放置盘向靠近取餐口方向移动,警示灯亮起的同时发出警笛声提醒人们取餐;s5、取餐完毕后,解锁组件、夹紧组件复位,传输组件向靠近起始位置方向移动。
13.作为本发明一种优选方案,s1包括以下步骤:s11、将第一摄像模组、第五摄像模组分别安装在竖板的左侧、右侧,保证第一摄像模组、第五摄像模组能够监控到该装置的所有区域,s12、利用第二摄像模组、第三摄像模组、第四摄像模组标定取餐区域。
14.与现有技术相比,本发明的有益效果是:本发明提供的一种菜品自动传输装置及方法与传统的利用传送带传输菜品的方式相比,本发明中将加工完成后的菜品进行分开传送,使加工完成的菜品相对独立,放置在该装置上的菜品彼此之间不受约束,后一个加工完成的菜品无需等待前一个完成的菜品在被取走后才能实现取餐,整体上更加方便,节省取餐时间,方便了人们的用餐,通过智能机器人将加工完成的菜品放置在放置盘上,夹紧组件将菜品进行夹紧,夹块与第三弹簧的相互配合为菜品在传输过程中起到减震缓冲的作用,能够有效避免菜品在传输过程中发生摇晃而发生倾倒现象,在放置完菜品后能够自动启动双轴减速电机完成菜品的传送,加工完成的菜品放在放置盘上,放置盘与压力传感器接触,压力传感器向控制箱发送信号,控制箱
启动双轴减速电机转动,将放置盘和菜品向靠近取餐口方向移动,同时,利用摄像模组能够对菜品位置信息进行精准定位,确保加工完成的菜品准确的静置在指定的取餐口,解锁组件松开夹紧组件的同时将放置盘和加工完成的菜品推出,红外传感器检测到放置盘的伸出后向控制箱发送信号,控制箱启动警示灯发出警示笛声和警示灯光提示用餐人员及时取餐,避免后面加工完成的菜品滞留在第一滑轨、第二滑轨上。
附图说明
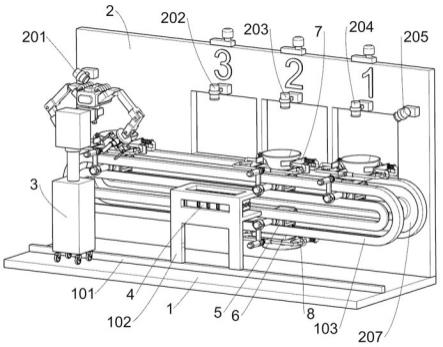
15.图1是本发明提供的一种菜品自动传输装置的第一种立体结构示意图;图2是本发明提供的一种菜品自动传输装置的第二种立体结构示意图;图3是本发明提供的一种菜品自动传输装置中传输组件和放置组件的结构示意图;图4是本发明提供的一种菜品自动传输装置中传输组件和放置组件的爆炸结构示意图;图5是本发明提供的一种菜品自动传输装置中a部分的放大图;图6是本发明提供的一种菜品自动传输装置中夹紧组件和解锁组件的结构示意图;图7是本发明提供的一种菜品自动传输装置中解锁组件的使用状态图。
16.图中:1、底座;2、竖板;3、智能机器人;4、控制箱;5、传输组件;6、放置组件;7、夹紧组件;8、解锁组件;9、操作屏;101、限位块;102、支撑架;103、第一滑轨; 201、第一摄像模组;202、第二摄像模组;203、第三摄像模组;204、第四摄像模组;205、第五摄像模组;206、红外传感器;207、第二滑轨;208、警示灯;501、双轴减速电机;502、轮子;503、压力传感器;504、距离传感器;601、导向框;602、滑块;603、第一弹簧;604、第一导向杆;605、放置盘;606、第二弹簧;607、定位块;701、第二导向杆;702、夹块;703、第三弹簧;801、环形滑轨;802、电动推杆;803、楔形杆;804、连杆。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.请参阅图1-7,一种菜品自动传输装置,包括底板1、竖板2和智能机器人3,其特征在于:底板1与竖板2连接,竖板2上开设有三个或三个以上的取餐口,竖板2一侧设置有第二滑轨207和摄像模组,竖板2另一侧设有红外传感器206和操作屏9,竖板2上设置有警示灯208,红外传感器206的数量、警示灯208的数量与取餐口的数量相匹配,摄像模组的数量为五个或五个以上,底板1上设置有限位块101,限位块101上设置有支撑架102,支撑架102与第一滑轨103连接,第一滑轨103、第二滑轨207上设置有用于传输菜品的传输组件5,传输组件5的数量为多个,传输组件5可在第一滑轨103、第二滑轨207上相对滑动,传输组件5上设置有放置菜品的放置组件6,放置组件6上设置有夹紧菜品的夹紧组件7,传输组件5一侧设
置有用于松开夹紧组件7的解锁组件8,支撑架102上设置有控制箱4,控制箱4与智能机器人3、摄像模组、红外传感器206、警示灯208、操作屏9、传输组件5、解锁组件8电性连接。
19.具体地,传输组件5包括双轴减速电机501、轮子502、压力传感器503、距离传感器504,双轴减速电机501的顶部设置有压力传感器503,双轴减速电机501右侧设置有距离传感器504,双轴减速电机501、压力传感器503、距离传感器504与控制箱4电性连接,双轴减速电机501上设置有输出轴,输出轴的数量为两个一组,输出轴上设置有轮子502。
20.具体地,放置组件6包括导向框601、滑块602、第一弹簧603、第一导向杆604、放置盘605、第二弹簧606、定位块607,双轴减速电机501上设置有导向框601,导向框601内部设置有滑块602和第一弹簧603,滑块602可在导向框601上相对滑动,第一弹簧603一端连接双轴减速电机501另一端连接滑块602,滑块602上设置有滑槽,滑槽上设置有第一导向杆604,放置盘605滑动设置在第一导向杆604上,第二弹簧606一端连接放置盘605另一端连接滑块602,放置盘605一侧设置有定位块607。
21.具体地,夹紧组件7的数量为两个一组,夹紧组件7对称设置在放置盘605上,夹紧组件7包括第二导向杆701、夹块702、第三弹簧703,第二导向杆701与放置盘605连接,夹块702设置在第二导向杆701上,第三弹簧703一端连接夹块702另一端连接第二导向杆701,夹块702可在第二导向杆701上相对滑动。
22.具体地,解锁组件8包括环形滑轨801、电动推杆802、楔形杆803和连杆804,环形滑轨801与输出轴连接,环形滑轨801上设置有连接架,连接架上设置有电动推杆802,电动推杆802与控制箱4电性连接,电动推杆802上设置有伸出杆,伸出杆与楔形杆803连接,连杆804设置在夹紧组件7上。
23.具体地,摄像模组包括第一摄像模组201、第二摄像模组202、第三摄像模组203、第四摄像模组204、第五摄像模组205,第二摄像模组202、第三摄像模组203、第四摄像模组204设置在取餐口中点位置,第一摄像模组201设置在竖板2左侧,第五摄像模组205设置在竖板2右侧。
24.本发明还提供了一种菜品自动传输方法,适用于以上的一种菜品自动传输装置,包括以下步骤:s1、将摄像模组安装在竖板2上,标定取餐区域和获取该装置的位置信息;s2、人们在操作屏9上点餐后,由智能机器人3将做完的菜品放置在放置盘605上,夹紧组件7将菜品进行夹紧,避免传送过程中发生摇晃导致菜品发生倾倒;s3、传输组件5将菜品沿着取餐口方向传送,到达标定的取餐区域后传输组件5停止运行,此时菜品刚好正对取餐口;s4、解锁组件8将夹紧组件7松开,松开夹紧组件7的同时将放置盘605向靠近取餐口方向移动,警示灯208亮起的同时发出警笛声提醒人们取餐;s5、取餐完毕后,解锁组件8、夹紧组件7复位,传输组件5向靠近起始位置方向移动。
25.具体地,s1包括以下步骤:s11、将第一摄像模组201、第五摄像模组205分别安装在竖板2的左侧、右侧,保证第一摄像模组201、第五摄像模组205能够监控到该装置的所有区域,s12、利用第二摄像模组202、第三摄像模组203、第四摄像模组204标定取餐区域。
26.本发明的工作原理:请参照图1-2,取餐口上设置有定位线,一个取餐口上设置有两条定位线,两条定位线之间构成一个取餐区域,取餐口分为第一取餐口、第二取餐口、第三取餐口;第二摄像模组202位于第三取餐口设置,第三摄像模组203位于第二取餐口设置,第四摄像模组204位于第一取餐口设置,第一摄像模组201、第五摄像模组205安装在竖板2
两侧,保证第一摄像模组201、第五摄像模组205能够监控到该装置的全部,标定取餐区域时,将放置盘605移动到取餐口处,保证定位块607与定位线对齐,第二摄像模组202拍摄第三取餐口的位置信息,记录定位块607与定位线对齐的特征,将拍摄的图像信息储存于储存模块中,如此一来则完成第三取餐口的取餐区域标定,同理再得到第二取餐口的取餐区域、第一取餐口的取餐区域,利用第一摄像模组201设置菜品放置区域,菜品放置区域位于第一摄像模组201下侧设置。
27.可以理解,请参照图1-7,控制箱4上设置有充电插口,控制箱4内部设置有蓄电池、电源模块、储存模块、处理模块、无线模块,充电插口与蓄电池电性连接,处理模块、电源模块与蓄电池电性连接,储存模块、无线模块和处理模块电性连接,处理模块用于控制双轴减速电机501、电动推杆802、警示灯208的启动和关闭和接收处理红外传感器206、摄像模组、距离传感器504、压力传感器503的信号,储存模块用于储存摄像模组录制的图像信息和标定数据,无线模块用于与智能机器人3进行信号连接;顾客根据操作屏9上的菜品信息进行线上点单,厨房工作人员根据顾客点单进行菜品制作,利用智能机器人3将做完的菜品放置在放置盘605上,放置盘605受到菜品重力后向下移动,第一弹簧603603压缩,放置盘605与压力传感器503表面接触,压力传感器503发生数值变化,数值信息以电信号的方式传递至处理模块,处理模块经过分析处理,启动双轴减速电机501,双轴减速电机501带动放置盘605和菜品向靠近取餐口方向移动,第一摄像模组201、第五摄像模组205用于实时对该装置进行全部监控,保证该装置在第一摄像模组201、第五摄像模组205的监控范围中,当双轴减速电机501开始传送菜品时,第五摄像模组205、第一摄像模组201拍摄第一滑轨103、第二滑轨207上的图像,拍摄的图像以电信号的方式传递给处理模块,处理模块接收图像信息并进行识别分析,判断第一取餐口上是否有停留的菜品,当判断拍摄的图像信息中第一取餐口没有停留菜品时,处理模块控制双轴减速电机501移动,将菜品送至到第一取餐口,随后在第四摄像模组204的作用下,菜品停留在第一取餐口;当判断拍摄的图像信息中第一取餐口上有停留菜品时,进入二次判断分析,判断第二取餐口上是否有停留菜品,当第二取餐口上没有提留菜品时,处理模块控制双轴减速电机501向第二取餐口方向移动,在第三摄像模组203的作用下,菜品停留在第二取餐口,当第二取餐口上有停留菜品时,处理模块将图像信息再次进行识别,判断第三取餐口上是否停留有菜品,当判断第三取餐口上没有停留菜品时,则将菜品传输到第三取餐口,当判断第三取餐口有停留菜品时,则将暂时停止双轴减速电机501的运行,带三个取餐口上没有停留菜品时,再启动双轴减速电机501;第四摄像模组204拍摄位于第一取餐口的菜品信息,当第四摄像模组204拍摄到定位块607与定位线同处一条直线或定位块607进入之前标定的取餐区域时,处理模块将第四摄像模组204的图像进行对比分析,关闭双轴减速电机501,启动电动推杆802,电动推杆802伸出时带动楔形杆803移动,楔形杆803与连杆804接触,带动夹块702向远离菜品方向移动,对菜品进行松开,第三弹簧703压缩,楔形杆803继续移动的同时推动放置盘605向靠近第一取餐口方向移动,第二弹簧606拉伸,放置盘605经过取餐口与红外传感器206发射的红外光线接触时,红外传感器206向处理模块发送信号,处理模块启动警示灯208,利用警示灯208发出警笛声和发出警示灯208光,提醒人们可以在第一取餐口上取餐,人们在第一取餐口取餐完毕后,放置盘605上不再放置菜品时,第一弹簧603603复位,压力传感器503发生数值变化,处理模块控制电动推杆802复位,电动推杆802复位的同时带动楔形杆803复位,此时第二弹簧606复位带动放
置盘605复位,第三弹簧703带动夹块702复位,处理模块在电动推杆802复位3秒后启动双轴减速电机501,将双轴减速电机501向靠近初始位置方向移动,双轴减速电机501上的距离传感器504用于控制两个双轴减速电机501之间的距离,避免发生碰撞,当距离传感器504检测到与前方双轴减速电机501的距离小于或等于25mm时,距离传感器504向处理模块发送信号,处理模块将双轴减速电机501进行停止运行,当距离两个双轴减速电机501之间的距离大于25mm时,则恢复双轴减速电机501的运行,第一摄像模组201用于拍摄菜品放置区域是否停留菜品,当处理模块判断第一摄像模组201拍摄的图像中菜品放置区域没有停留菜品,处理模块控制双轴减速电机501移动至菜品放置区后停止运行,当判断菜品放置区域有停留菜品时,处理模块控制双轴减速电机501停留在第三取餐口下侧,具体为靠近底座1一侧。
28.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1