塔机顶升监控识别系统、方法、机器可读存储介质与流程
本发明涉及智能检测,具体地涉及一种塔机顶升监控识别系统、方法、机器可读存储介质。
背景技术:
1、塔机安装是一个多人协作且操作步骤需要严格监控的过程,其步骤主要包括:1、安装塔吊底架和塔吊基础节;2、安装套架;3、安装塔帽和回转支承;4、安装塔吊平衡臂;5、安装塔吊起重臂;6、接电、穿绳;7、塔吊顶升;8、安装调试。其中塔吊顶升过程包括,在塔吊基础节上逐一连续增加标准节,直到塔吊起重臂达到目标起升高度。
2、然而本技术发明人在实现本发明的过程中发现,现有技术中并没有监控标准节加节状态、顶升节数和顶升高度信息的监控系统,顶升作业时,只能由专人监控加节作业中的状态,记录顶升节数和顶升高度信息,并在顶升和安装结束后填写塔吊顶升旁站记录。采用上述人工方式管理塔机高度,容易因为疏忽而漏补有些关键性信息,导致对塔机的监测不到位,引发安全事故。
技术实现思路
1、本发明实施例的目的是提供一种塔机顶升监控识别系统,该系统通过实时监控吊钩状态,识别和记录塔机顶升过程中所处的状态,并判断塔机顶升是否完成。
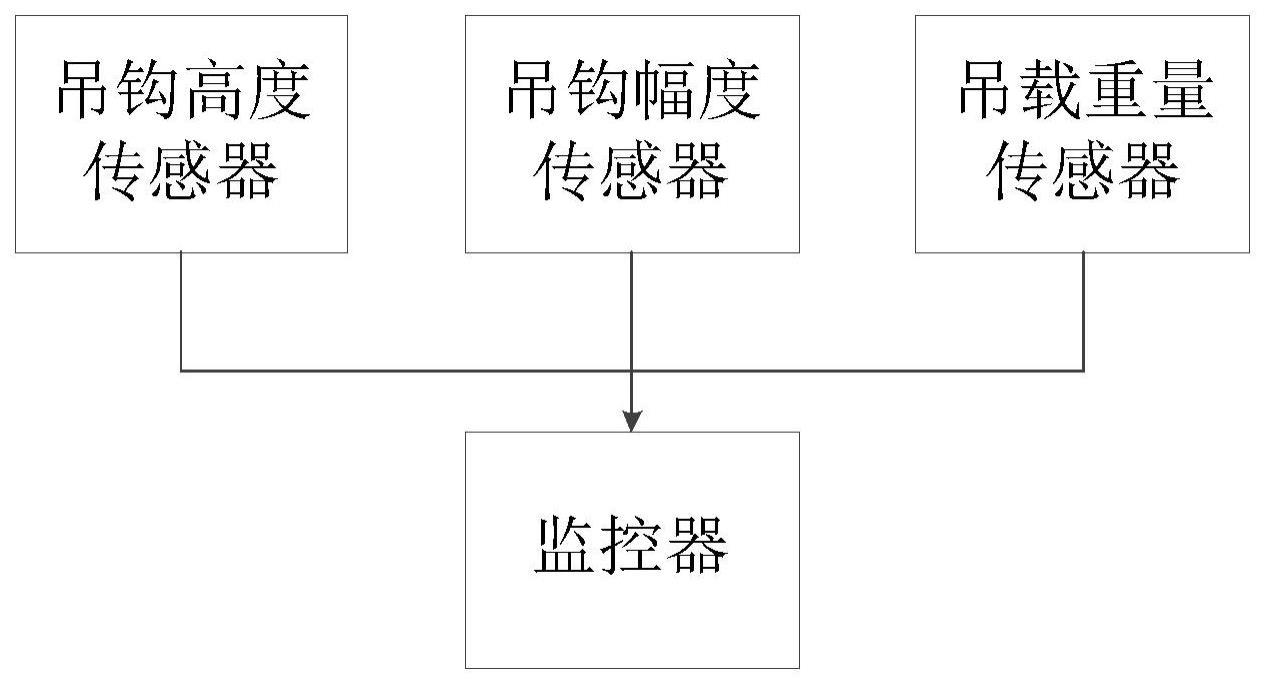
2、为了实现上述目的,本发明实施例提供一种塔机顶升监控识别系统,该系统包括:
3、吊钩高度传感器,用于监控吊钩距离地面的高度;
4、吊钩幅度传感器,用于监控所述吊钩相对于大臂臂跟的水平位移幅度;
5、吊载重量传感器,用于监控所述吊钩吊载重量;以及
6、监控器,用于将塔机顶升过程拆分成多个有顺序的作业状态,每个作业状态对应有不同的状态值,在塔机顶升过程中根据所述吊钩高度传感器、吊钩幅度传感器和吊载重量传感器得到的实时监控数据,识别和记录塔机顶升过程中所处的作业状态,并判断塔机顶升是否完成。
7、优选的,所述监控器用于执行:在所述实时监控数据符合预设的作业状态集中任意一者时,记录并输出所述塔吊处于该作业状态,并继续监测塔吊是否处于所述作业状态集中该作业状态的下一个状态,直至监测到塔吊处于所述作业状态集中的最后一状态,所述作业状态集包括下述任一组合:标准节吊起、标准节吊起高度最高、标准节到达幅度最小、标准节最高处卸载、下一标准节吊起、以及大臂找平并加节。
8、优选的,当所述监控器识别当前作业已经过所述作业状态集中的全部作业状态且开始所述作业状态集中第一个状态时,判定塔机已完成一次顶升作业;以及
9、所述监控器还用于记录:塔机当前升节数和/或塔机当前起升高度,其中,当完成一次顶升作业时,所述塔机当前升节数累加1,所述塔机当前起升高度累加一个标准节高度。
10、可选的,所述监控器执行以下操作中的一者或多者:
11、当满足以下条件时,将塔机的当前作业状态识别为所述标准节吊起状态:所述吊载重量传感器的监测值符合预设的标准节重量,且所述吊钩高度传感器的监测值处于预设的高度值以内;
12、当满足以下条件时,将塔机的当前作业状态识别为所述标准节吊起高度最高:所述吊载重量传感器的监测值符合所述预设的标准节重量,且所述吊钩高度传感器的监测值符合所述塔机当前起升高度;
13、当满足以下条件时,将塔机的当前作业状态识别为所述标准节到达幅度最小:所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于预设幅度值以内;
14、当满足以下条件时,将塔机的当前作业状态识别为所述标准节最高处卸载:所述吊载重量传感器的监测值小于预设的最小重量值,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于所述预设幅度值以内;
15、当满足以下条件时,将塔机的当前作业状态识别为所述下一标准节吊起:在所述标准节最高处卸载状态后,所述吊载重量传感器的监测值符合所述预设的标准节重量,且所述吊钩高度传感器的监测值处于所述预设的高度值以内;以及
16、当满足以下条件时,将塔机的当前作业状态识别为所述大臂找平并加节:在所述下一标准节吊起状态后,当所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值符合第二预设幅度值以内时,确定当前处于大臂找平状态;
17、当处于所述大臂找平状态时长符合预设时长时确定完成一次加节,所述监控器记录塔机当前升节数加1,并记录塔机当前起升高度加一个预设的标准节高度。
18、优选的,当满足以下条件时,判断完成一次加节:所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于所述预设幅度值以内。
19、优选的,当满足以下条件时,判断塔机顶升完成:所述吊载重量传感器的监测值小于预设的最小重量值,且所述吊钩高度传感器的监测值处于预设的高度值以内。
20、进一步的,上述系统还包括大臂回转角度传感器,用于在所述大臂找平并加节期间,监控所述大臂相对于预设参考方向的回转角度。
21、另一方面,本发明提供一种塔机顶升监控识别方法,该方法包括:
22、监控吊钩距离地面的高度;
23、监控所述吊钩相对于大臂臂跟的水平位移幅度;
24、监控所述吊钩吊载重量;以及
25、将塔机顶升过程拆分成多个有顺序的作业状态,每个作业状态对应有不同的状态值,在塔机顶升过程中根据所获取的吊钩高度、吊钩幅度和吊载重量,识别和记录所述塔机顶升过程中所处的作业状态,并判断塔机顶升是否完成。
26、在所述实时监控数据符合预设的作业状态集中任意一者时,记录并输出所述塔吊处于该作业状态,并继续监测塔吊是否处于所述作业状态集中该作业状态的下一个状态,直至监测到塔吊处于所述作业状态集中的最后一状态,所述作业状态集包括下述任一组合:标准节吊起、标准节吊起高度最高、标准节到达幅度最小、标准节最高处卸载、下一标准节吊起、大臂找平并加节。
27、优选的,当识别当前作业已经过所述作业状态集中的全部作业状态且开始所述作业状态集中第一个状态时,判定塔机已完成一次顶升作业;以及
28、还记录塔机当前升节数和/或塔机当前起升高度,其中,当完成一次顶升作业时,所述塔机当前升节数累加1,所述塔机当前起升高度累加一个标准节高度。
29、进一步的,在所述大臂找平并加节期间,还通过大臂回转角度传感器监控所述大臂相对于预设参考方向的回转角度。
30、可选的,当满足以下条件时,将塔机的当前作业状态识别为所述标准节吊起状态:所述吊载重量传感器的监测值符合预设的标准节重量,且所述吊钩高度传感器的监测值处于预设的高度值以内;
31、当满足以下条件时,将塔机的当前作业状态识别为所述标准节吊起高度最高:所述吊载重量传感器的监测值符合所述预设的标准节重量,且所述吊钩高度传感器的监测值符合所述塔机当前起升高度;
32、当满足以下条件时,将塔机的当前作业状态识别为所述标准节到达幅度最小:所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于预设幅度值以内;
33、当满足以下条件时,将塔机的当前作业状态识别为所述标准节最高处卸载:所述吊载重量传感器的监测值小于预设的最小重量值,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于所述预设幅度值以内;
34、当满足以下条件时,将塔机的当前作业状态识别为所述下一标准节吊起:在所述标准节最高处卸载状态后,所述吊载重量传感器的监测值符合所述预设的标准节重量,且所述吊钩高度传感器的监测值处于所述预设的高度值以内;以及
35、当满足以下条件时,将塔机的当前作业状态识别为所述大臂找平并加节:在所述下一标准节吊起状态后,当所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值符合第二预设幅度值以内时,确定当前处于大臂找平状态;
36、当处于所述大臂找平状态时长符合预设时长时确定完成一次加节,记录塔机当前升节数加1,并记录塔机当前起升高度加一个预设的标准节高度。
37、优选的,当满足以下条件时,判断完成一次加节:所述吊载重量传感器的监测值符合所述预设的标准节重量,所述吊钩高度传感器的监测值符合所述塔机当前起升高度,且所述吊钩幅度传感器的监测值处于所述预设幅度值以内。
38、优选的,当满足以下条件时,判断塔机顶升完成:所述吊载重量传感器的监测值小于预设的最小重量值,且所述吊钩高度传感器的监测值处于预设的高度值以内。
39、另一方面,本发明提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行本技术上述任一项所述的塔机顶升监控识别方法。
40、通过上述技术方案,传感器同时监控吊钩距离地面的高度、吊钩相对于大臂臂跟的水平位移幅度、以及吊钩吊载重量,并将监控数据发送给监控器,监控器通过将塔机顶升过程拆分成多个有顺序的作业状态,及每个作业状态对应有不同的状态值,在塔机顶升过程中根据所获取的吊钩高度、吊钩幅度和吊载重量,识别和记录所述塔机顶升过程中所处的作业状态,并判断塔机顶升是否完成,节省了人力监控和记录工作。
41、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!