一种智能垃圾桶及智能垃圾桶系统的制作方法
1.本发明涉及垃圾桶技术领域,具体为一种智能垃圾桶及智能垃圾桶系统。
背景技术:
2.垃圾是不被需要或无用的固体、流体物质。在人口密集的大城市,垃圾处理是一个令人头痛的问题,常见的做法是收集后送往堆填区进行填埋处理,或是用焚化炉焚化,但两者均会制造环境保护的问题,而终止过度消费可进一步减轻堆填区饱和程度。堆填区中的垃圾处理不但会污染地下水和发出臭味,而且很多城市可供堆填的面积已越来越少,焚化则无可避免会产生有毒气体,危害生物体,多数的城市都在研究减少垃圾产生的方法,和鼓励资源回收,在现有的垃圾桶中在垃圾桶装满后多余的垃圾就会溢出来,需要环卫工人手动清理,不具备对垃圾筒的自动更换,也不便于对内部的环境进行监测,不能对内部的湿气和异味进行处理。
技术实现要素:
3.本发明的目的在于提供一种智能垃圾桶及智能垃圾桶系统,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种智能垃圾桶,包括外箱,所述外箱的内部内部转动连接有放置筒,所述放置筒的内部等距开设有四个放置槽,所述放置筒的内部等距设有四个通网,所述放置槽的内部设有沥水垃圾桶,所述沥水垃圾桶的顶部固定连接有限位环,所述放置筒的顶部对称固定连接有与限位环配合的支撑块,所述支撑块的顶部设有压力传感器,所述底箱的内部转动连接有固定套,所述固定套与放置筒固定连接,所述固定套与外箱转动连接,所述固定套的内部活动连接有固定杆,所述固定杆的顶部固定连接有顶出板,所述放置筒的内部等距开设有四个与顶出板配合的顶口,所述固定套的外侧固定连接有一号齿轮,所述底箱的内部转动连接有不规则齿轮,所述不规则齿轮与一号齿轮啮合连接,所述底箱的内部设有电机,所述电机的输出端与不规则齿轮固定连接,所述放置筒的内部等距开设有沥水口,所述外箱的一侧设有循环加热机构,所述外箱的顶部固定连接有取筒板,所述取筒板的顶部设有翻盖板,所述外箱的顶部设有顶箱,所述顶箱与取筒板固定连接,所述顶箱的内部输液进料管,所述顶箱的顶部滑动连接有与进料管配合的封堵板。
5.作为优选,所述底箱的底部设有直线模组,所述直线模组的移动滑台上安装有二号调节板,所述二号调节板与固定杆固定连接。
6.作为优选,所述循环加热机构包括一号通风箱,所述外箱的一侧设有一号通风箱,所述外箱的内部设有出风头,所述一号通风箱与出风头通过管道连接,所述一号通风箱的内部设有电加热丝,所述外箱的一侧设有二号通风箱,所述二号通风箱的内部设有活性炭除味板,所述二号通风箱与一号通风箱通过管道连接。
7.作为优选,所述外箱的一侧设有风机,所述风机的输出端与二号通风箱通过风管
连接。
8.作为优选,所述外箱的内侧设有三号通风箱,所述三号通风箱的一侧设有过滤网,所述风机的输入端与三号通风箱通过风管连接。
9.作为优选,所述顶箱的内部滑动连接有滑动板,所述滑动板的顶部对称固定连接有两个移动板,所述移动板与封堵板固定连接,所述顶箱的内部滑动连接有一号调节板,所述一号调节板的内部开设有调节斜槽,所述滑动板的一侧固定连接有调节杆,所述调节杆与调节斜槽滑动连接,所述顶箱的底部设有气缸,所述气缸的输出端与一号调节板固定连接。
10.作为优选,所述外箱的一侧设有收集水箱,所述收集水箱与外箱通过管道连接。
11.作为优选,所述顶箱的一侧设有红外测距仪,所述外箱的内部设有温湿度传感器。
12.作为优选,所述外箱的一侧设有控制面板,所述直线模组、电加热丝、风机、电机、压力传感器、气缸和红外测距仪均与控制面板电性连接。
13.一种智能垃圾桶系统,包括放置时间检测单元、内部环境检测单元、放置重量检测单元、清理时间提取单元和垃圾标签记录单元,所述放置时间检测单元与内部环境检测单元双向连接,所述内部环境检测单元与放置重量检测单元双向连接,所述放置重量检测单元与清理时间提取单元双向连接,所述清理时间提取单元的输出端与垃圾标签记录单元的输入端通讯连接;
14.所述放置时间检测单元用于对垃圾桶持续放置时间进行记录并对放置时间较长时进行提示;
15.所述内部环境检测单元用于对垃圾桶内的温度和湿度数值进行检测处理;
16.所述放置重量检测单元用于对垃圾桶内装有垃圾的重量进行称重并对重量进行实时监测;
17.所述清理时间提取单元用于对垃圾桶需要进行清理的时间周期进行提醒设置;
18.所述垃圾标签记录单元用于对取出垃圾桶内的垃圾时进行垃圾标签打码记录处理。
19.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
20.与现有技术相比,本发明的有益效果是:通过循环加热机构,实现了对外箱内部的湿气进行抽取并加热,吹入热风对内部环境进行干燥处理,同时的通过活性炭除味板进行除异味处理,通过加入了顶出板,实现了对放置槽内放置的沥水垃圾桶进行顶出,便于在垃圾装满后进行取出,提高了工作效率,通过加入了不规则齿轮、一号齿轮,实现了在不规则齿轮转动时带动电机和固定套转动九十度,将四个放置槽内的沥水垃圾桶进行位置调换处理,防止垃圾装满的情况。
附图说明
21.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其他的实施附图。
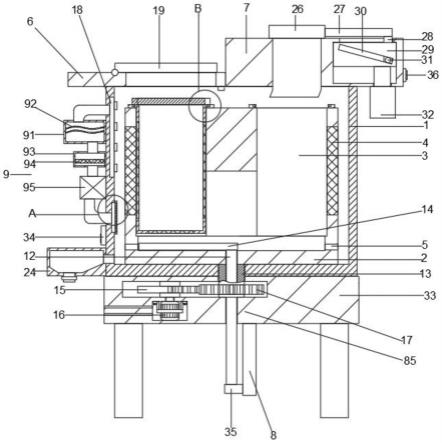
22.图1为本发明内部结构示意图;
23.图2为本发明图1中a处放大图;
24.图3为本发明图1中b处放大图;
25.图4为本发明顶箱俯视图;
26.图5为本发明顶出板俯视图;
27.图6为本发明一号齿轮俯视图;
28.图7为本发明系统框图。
29.图中:1、外箱;2、放置筒;3、放置槽;4、通网;5、沥水口;6、取筒板;7、顶箱;8、直线模组;9、循环加热机构;91、一号通风箱;92、电加热丝;93、二号通风箱;94、活性炭除味板;95、风机;10、三号通风箱;11、过滤网;12、固定杆;13、固定套;14、顶出板;15、不规则齿轮;16、电机;17、一号齿轮;18、出风头;19、翻盖板;20、支撑块;21、压力传感器;22、限位环;23、沥水垃圾桶;24、收集水箱;25、顶口;26、封堵板;27、移动板;28、滑动板;29、一号调节板;30、调节斜槽;31、调节杆;32、气缸;33、底箱;34、控制面板;35、二号调节板;36、红外测距仪。
具体实施方式
30.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置的例子。
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例1:
33.参见图1至图7所示,本发明实施例的一种智能垃圾桶,包括外箱1,外箱1的内部内部转动连接有放置筒2,放置筒2的内部等距开设有四个放置槽3,放置筒2的内部等距设有四个通网4,放置槽3的内部设有沥水垃圾桶23,沥水垃圾桶23的顶部固定连接有限位环22,放置筒2的顶部对称固定连接有与限位环22配合的支撑块20,支撑块20的顶部设有压力传感器21,底箱33的内部转动连接有固定套13,固定套13与放置筒2固定连接,固定套13与外箱1转动连接,固定套13的内部活动连接有固定杆12,固定杆12的顶部固定连接有顶出板14,放置筒2的内部等距开设有四个与顶出板14配合的顶口25,固定套13的外侧固定连接有一号齿轮17,底箱33的内部转动连接有不规则齿轮15,不规则齿轮15与一号齿轮17啮合连接,底箱33的内部设有电机16,电机16的输出端与不规则齿轮15固定连接,电机16的输出端带动不规则齿轮15旋转一周,不规则齿轮15带动一号齿轮17转动九十度后继续啮合,一号齿轮17通过固定套13带动放置筒2和放置槽3内的沥水垃圾桶23转动九十度,将四个沥水垃圾桶23的位置进行调换,放置筒2的内部等距开设有沥水口5,外箱1的一侧设有循环加热机构9,外箱1的顶部固定连接有取筒板6,取筒板6的顶部设有翻盖板19,外箱1的顶部设有顶箱7,顶箱7与取筒板6固定连接,顶箱7的内部输液进料管,顶箱7的顶部滑动连接有与进料管配合的封堵板26,封堵板26对进料管进行封堵处理。
34.实施例2:
35.其中,底箱33的底部设有直线模组8,直线模组8的移动滑台上安装有二号调节板35,二号调节板35与固定杆12固定连接,直线模组8的移动滑台带动二号调节板35和固定杆12向上移动,固定杆12带动顶出板14对放置槽3内的沥水垃圾桶23进行顶出,打开翻盖板19,即可将装满垃圾的沥水垃圾桶23进行取出处理。
36.其中,循环加热机构9包括一号通风箱91,外箱1的一侧设有一号通风箱91,外箱1的内部设有出风头18,一号通风箱91与出风头18通过管道连接,一号通风箱91的内部设有电加热丝92,外箱1的一侧设有二号通风箱93,二号通风箱93的内部设有活性炭除味板94,二号通风箱93与一号通风箱91通过管道连接,通过活性炭除味板94进行除臭,并通过电加热丝92对风进行加热,加热后通过出风头18进行吹出,循环处理并对外箱1内的环境进行干燥处理。
37.其中,外箱1的一侧设有风机95,风机95的输出端与二号通风箱93通过风管连接,风机95抽出外箱1内的气体,进行循环处理。
38.其中,外箱1的内侧设有三号通风箱10,三号通风箱10的一侧设有过滤网11,风机95的输入端与三号通风箱10通过风管连接,过滤网11对吸入空气中的杂质进行过滤处理。
39.其中,顶箱7的内部滑动连接有滑动板28,滑动板28的顶部对称固定连接有两个移动板27,移动板27与封堵板26固定连接,顶箱7的内部滑动连接有一号调节板29,一号调节板29的内部开设有调节斜槽30,滑动板28的一侧固定连接有调节杆31,调节杆31与调节斜槽30滑动连接,顶箱7的底部设有气缸32,气缸32的输出端与一号调节板29固定连接,气缸32的输出端带动一号调节板29向下移动,一号调节板29向下移动会通过调节斜槽30带动调节杆31和滑动板28进行移动,从而通过滑动板28带动移动板27和封堵板26进行移动,封堵板26取消对进料管的封堵,即可向放置槽3内的沥水垃圾桶23内倒入垃圾。
40.其中,外箱1的一侧设有收集水箱24,收集水箱24与外箱1通过管道连接,收集水箱24对内部的废水进行收集处理。
41.其中,顶箱7的一侧设有红外测距仪36,外箱1的内部设有温湿度传感器,红外测距仪36对一侧的物体进行红外线探测处理,当人到达顶箱7的一侧附近站立时,自动启动气缸32。
42.其中,外箱1的一侧设有控制面板34,直线模组8、电加热丝92、风机95、电机16、压力传感器21、气缸32和红外测距仪36均与控制面板34电性连接,通过控制面板34对装置进行集中操控处理,提高了装置使用的安全性和工作效率。
43.实施例3:
44.一种智能垃圾桶系统,包括放置时间检测单元、内部环境检测单元、放置重量检测单元、清理时间提取单元和垃圾标签记录单元,放置时间检测单元与内部环境检测单元双向连接,内部环境检测单元与放置重量检测单元双向连接,放置重量检测单元与清理时间提取单元双向连接,清理时间提取单元的输出端与垃圾标签记录单元的输入端通讯连接;
45.放置时间检测单元用于对垃圾桶持续放置时间进行记录并对放置时间较长时进行提示;
46.内部环境检测单元用于对垃圾桶内的温度和湿度数值进行检测处理;
47.放置重量检测单元用于对垃圾桶内装有垃圾的重量进行称重并对重量进行实时
监测;
48.清理时间提取单元用于对垃圾桶需要进行清理的时间周期进行提醒设置;
49.垃圾标签记录单元用于对取出垃圾桶内的垃圾时进行垃圾标签打码记录处理,对取出垃圾的信息进行标签设置,从而对处理垃圾时可以快速获取垃圾的位置和信息,提高了垃圾管理的效率。
50.实施例4:
51.s1、通过外接电源进行通电,红外测距仪36对一侧的物体进行红外线探测处理,当人到达顶箱7的一侧附近站立时,自动启动气缸32,气缸32的输出端带动一号调节板29向下移动,一号调节板29向下移动会通过调节斜槽30带动调节杆31和滑动板28进行移动,从而通过滑动板28带动移动板27和封堵板26进行移动,封堵板26取消对进料管的封堵,即可向放置槽3内的沥水垃圾桶23内倒入垃圾;
52.s2、沥出的水通过沥水口5流出并进入外箱1内进入收集水箱24,收集水箱24对污水进行收集;
53.s3、通过压力传感器21对沥水垃圾桶23内的垃圾量进行监测,在进料管底部的沥水垃圾桶23装满后,通过控制面板34启动电机16,电机16的输出端带动不规则齿轮15旋转一周,不规则齿轮15带动一号齿轮17转动九十度后继续啮合,一号齿轮17通过固定套13带动放置筒2和放置槽3内的沥水垃圾桶23转动九十度,将四个沥水垃圾桶23的位置进行调换;
54.s4、需要取出时,通过控制面板34启动直线模组8,直线模组8的移动滑台带动二号调节板35和固定杆12向上移动,固定杆12带动顶出板14对放置槽3内的沥水垃圾桶23进行顶出,打开翻盖板19,即可将装满垃圾的沥水垃圾桶23进行取出处理;
55.s5、在长期使用时通过温湿度传感器对温湿度进行检测,通过控制面板34启动风机95,风机95抽出外箱1内的气体,通过活性炭除味板94进行除臭,并通过电加热丝92对风进行加热,加热后通过出风头18进行吹出,循环处理并对外箱1内的环境进行干燥处理。
56.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
57.本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围由下面的权利要求指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1