一种垃圾分拣装置
1.本发明涉及垃圾分拣技术领域,具体为一种垃圾分拣装置。
背景技术:
2.在城市文明建设不断加强的过程中,对于城市垃圾的分类处理也逐渐深入到人们日常生活中,在对垃圾分类时,普通的居民一般难以准确地区分各类垃圾,因此会影响垃圾分类的效率。
3.现有技术中,为了解决这一问题,往往是居民配合环卫工人一同对垃圾进行分类,以防止各种不同类型的垃圾混杂在一起。
4.但是,尽管目前垃圾已经进行了分类,但是不代表所有人都会按照垃圾分类进行丢垃圾,并且人工分拣垃圾有一定的风险性,环卫工人在分拣时如果划伤手则很有可能被污染源感染,从而损害其生命健康。
技术实现要素:
5.(一)解决的技术问题
6.本发明的目的在于提供一种垃圾分拣装置,以解决上述背景技术中提出尽管目前垃圾已经进行了分类,但是不代表所有人都会按照垃圾分类进行丢垃圾,并且人工分拣垃圾有一定的风险性,划伤手则很有可能被污染源感染的问题。
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:一种垃圾分拣装置,包括垃圾桶、垃圾分拣区、垃圾识别机构、垃圾打包机构、垃圾取出机构和太阳能供电机构,所述垃圾分拣区固定设置在垃圾桶的内部,所述垃圾分拣区的数量为四个,所述垃圾识别机构位于垃圾桶的上端,所述垃圾打包机构位于垃圾识别机构的下方,所述垃圾取出机构位于垃圾桶的内部,所述太阳能供电机构位于垃圾桶的上端,所述垃圾识别机构包括支撑杆、红外识别模块、入口、支撑板、第一电机、第一传动轴、支撑座、第二电机、第二传动轴、第一齿轮、第二齿轮、开合板、垃圾放置框、区分框和垃圾袋,所述支撑杆固定安装在垃圾桶的上端,所述红外识别模块固定安装在支撑杆的下端,所述入口固定设置在垃圾桶的上端,所述红外识别模块位于入口的上方,所述支撑板固定安装在垃圾分拣区的上方,所述支撑板固定安装在垃圾桶的内部,所述第一电机固定安装在支撑板上端的中部,所述第一传动轴固定安装在第一电机传动端的上端,所述支撑座固定安装在第一传动轴的上端,所述第二电机固定安装在支撑座的下端,所述第二传动轴固定安装在第二电机传动端的上端,所述第二传动轴贯穿支撑座并与支撑座活动连接,所述第一齿轮固定安装在第二传动轴的上端,所述第二齿轮活动安装在第一齿轮的外端,所述第一齿轮与第二齿轮相啮合,所述开合板固定安装在第一齿轮、第二齿轮的外端,所述开合板呈对称分布,所述垃圾放置框固定安装在支撑座的外端,所述开合板活动安装在垃圾放置框的下端,所述区分框固定安装在支撑板的外端,所述区分框与垃圾分拣区相连通,所述区分框的数量为四个,所述垃圾袋活动安装在区分框
的内部,所述垃圾袋贯穿区分框并与区分框活动连接,通过设置垃圾识别机构,可以使得两个闭合的开合板打开,从而可以将垃圾投入到对应的垃圾袋中,对垃圾进行自动区分。
9.优选的,所述垃圾打包机构包括第三电机、第三传动轴、第一伞齿轮、第二伞齿轮、第一丝杆、第二丝杆、第一滑块、第二滑块、第一电热压板和第二电热压板,所述第三电机固定安装在支撑板的下端,所述第三电机的数量为四个,所述第三电机呈对称分布,所述第三传动轴固定安装在第三电机传动端的外端,所述第一伞齿轮固定安装在第三传动轴的外端,所述第二伞齿轮活动安装在第一伞齿轮的外端,所述第一伞齿轮与第二伞齿轮相啮合,所述第一丝杆固定安装在第一伞齿轮的外端,所述第二丝杆固定安装在第二伞齿轮的外端,所述第一滑块活动安装在第一丝杆的外端,所述第二滑块活动安装在第二丝杆的外端,所述第一丝杆与第二丝杆的长度相同,所述第一丝杆与第一滑块相适配,所述第二丝杆与第二滑块相适配,所述第一电热压板固定安装在第一滑块的外端,所述第二电热压板固定安装在第二滑块的外端,通过设置垃圾打包机构,可以完成自动打包,垃圾袋自动放置。
10.优选的,所述第一电热压板活动安装在第二电热压板的下端,所述第一电热压板与区分框活动连接,所述第二电热压板与区分框活动连接。
11.优选的,所述垃圾取出机构包括第四电机、第四传动轴、密封门、液压缸、输出杆和推板,所述第四电机固定安装在垃圾桶的内部,所述第四电机的数量为四个,所述第四传动轴固定安装在第四电机传动端的外端,所述密封门固定安装在传动轴的外端,所述密封门的数量为四个,所述密封门与垃圾桶活动连接,通过设置垃圾取出机构,可完成垃圾自动取出。
12.优选的,所述液压缸固定安装在垃圾桶的内部,所述液压缸的数量为四个,所述输出杆固定安装在液压缸输出端的外端,所述推板固定安装在输出杆的外端。
13.优选的,所述太阳能供电机构包括太阳能光伏发电板、底座、蓄电池、配电箱和主控制器,所述太阳能光伏发电板固定安装在垃圾桶的上端,所述底座固定安装在垃圾桶的下端,所述蓄电池固定安装在底座内部的左侧,所述配电箱固定安装在底座内部的右侧,所述主控制器固定安装在底座的内部,通过设置太阳能供电机构,可以为本装置提供电能。
14.与现有技术相比,本发明的有益效果是:
15.1、该垃圾分拣装置,通过设置垃圾识别机构,四个区分框分别对应的是可回收物、厨余垃圾,有害垃圾和其他垃圾,将垃圾从入口丢入到垃圾放置框内部,红外识别模块对不同种类的垃圾进行识别,并将识别出的信息传输给主控制器,主控制器则控制第一电机带动第一传动轴以及支撑座和垃圾放置框进行旋转,直至垃圾放置框旋转至与垃圾相匹配的区分框上方,然后主控制器控制第二电机带动第二传动轴转动,从而带动第一齿轮与第二齿轮反向转动,从而可以使得两个闭合的开合板打开,从而可以将垃圾投入到对应的垃圾袋中,对垃圾进行自动区分,不需要人工分拣,更加安全;
16.2、该垃圾分拣装置,通过设置垃圾打包机构,垃圾袋垃圾装满之后,第三电机带动第三传动轴、第一伞齿轮、第二伞齿轮转动,从而带动第一丝杆、第二丝杆转动,从而带动第一电热压板、第二电热压板左右、前后交叉运动,从而可以对垃圾袋进行收口,加热后,垃圾袋直接断裂脱离掉到垃圾桶底部,区分框内部的垃圾袋在受到垃圾压力时,自然垂落,底部被热压封口,从而可以再次存放垃圾,完成自动打包,垃圾袋自动放置;
17.3、该垃圾分拣装置,通过设置垃圾取出机构,打包完成之后,主控制器控制第四电
机带动第四传动轴转动,从而带动密封面,液压缸带动输出杆和推板前后运动,将垃圾袋推出去,即可完成垃圾自动取出。
附图说明
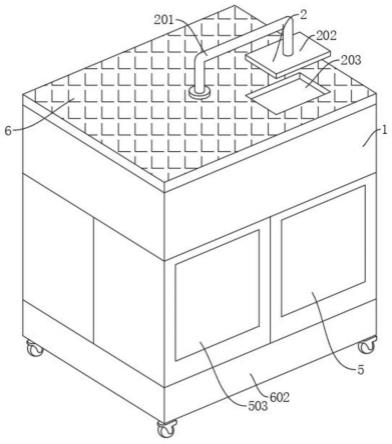
18.图1为本发明立体结构示意图;
19.图2为本发明垃圾识别机构俯视剖面结构示意图;
20.图3为本发明垃圾打包机构俯视剖面结构示意图;
21.图4为本发明图3中a处结构放大示意图;
22.图5为本发明垃圾放置框俯视剖面结构示意图;
23.图6为本发明正视局部剖面结构示意图。
24.图中:1、垃圾桶;2、垃圾分拣区;3、垃圾识别机构;301、支撑杆;302、红外识别模块;303、入口;304、支撑板;305、第一电机;306、第一传动轴;307、支撑座;308、第二电机;309、第二传动轴;310、第一齿轮;311、第二齿轮;312、开合板;313、垃圾放置框;314、区分框;315、垃圾袋;4、垃圾打包机构;401、第三电机;402、第三传动轴;403、第一伞齿轮;404、第二伞齿轮;405、第一丝杆;406、第二丝杆;407、第一滑块;408、第二滑块;409、第一电热压板;410、第二电热压板;5、垃圾取出机构;501、第四电机;502、第四传动轴;503、密封门;504、液压缸;505、输出杆;506、推板;6、太阳能供电机构;601、太阳能光伏发电板;602、底座;603、蓄电池;604、配电箱;605、主控制器。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1-图6,本发明提供一种技术方案:一种垃圾分拣装置,包括垃圾桶1、垃圾分拣区2、垃圾识别机构3、垃圾打包机构4、垃圾取出机构5和太阳能供电机构6,垃圾分拣区2固定设置在垃圾桶1的内部,垃圾分拣区2的数量为四个,垃圾识别机构3位于垃圾桶1的上端,垃圾打包机构4位于垃圾识别机构3的下方,垃圾取出机构5位于垃圾桶1的内部,太阳能供电机构6位于垃圾桶1的上端,垃圾识别机构3包括支撑杆301、红外识别模块302、入口303、支撑板304、第一电机305、第一传动轴306、支撑座307、第二电机308、第二传动轴309、第一齿轮310、第二齿轮311、开合板312、垃圾放置框313、区分框314和垃圾袋315,支撑杆301固定安装在垃圾桶1的上端,红外识别模块302固定安装在支撑杆301的下端,入口303固定设置在垃圾桶1的上端,红外识别模块302位于入口303的上方,支撑板304固定安装在垃圾分拣区2的上方,支撑板304固定安装在垃圾桶1的内部,第一电机305固定安装在支撑板304上端的中部,第一传动轴306固定安装在第一电机305传动端的上端,支撑座307固定安装在第一传动轴306的上端,第二电机308固定安装在支撑座307的下端,第二传动轴309固定安装在第二电机308传动端的上端,第二传动轴309贯穿支撑座307并与支撑座307活动连接,第一齿轮310固定安装在第二传动轴309的上端,第二齿轮311活动安装在第一齿轮310的外端,第一齿轮310与第二齿轮311相啮合,开合板312固定安装在第一齿轮310、第二齿轮
311的外端,开合板312呈对称分布,垃圾放置框313固定安装在支撑座307的外端,开合板312活动安装在垃圾放置框313的下端,区分框314固定安装在支撑板304的外端,区分框314与垃圾分拣区2相连通,区分框314的数量为四个,垃圾袋315活动安装在区分框314的内部,垃圾袋315贯穿区分框314并与区分框314活动连接,通过设置垃圾识别机构3,四个区分框314分别对应的是可回收物、厨余垃圾,有害垃圾和其他垃圾,将垃圾从入口303丢入到垃圾放置框313内部,红外识别模块302对不同种类的垃圾进行识别,并将识别出的信息传输给主控制器605,主控制器605则控制第一电机305带动第一传动轴306以及支撑座307和垃圾放置框313进行旋转,直至垃圾放置框313旋转至与垃圾相匹配的区分框314上方,然后主控制器605控制第二电机308带动第二传动轴309转动,从而带动第一齿轮310与第二齿轮311反向转动,从而可以使得两个闭合的开合板312打开,从而可以将垃圾投入到对应的垃圾袋315中,对垃圾进行自动区分;
27.垃圾打包机构4包括第三电机401、第三传动轴402、第一伞齿轮403、第二伞齿轮404、第一丝杆405、第二丝杆406、第一滑块407、第二滑块408、第一电热压板409和第二电热压板410,第三电机401固定安装在支撑板304的下端,第三电机401的数量为四个,第三电机401呈对称分布,第三传动轴402固定安装在第三电机401传动端的外端,第一伞齿轮403固定安装在第三传动轴402的外端,第二伞齿轮404活动安装在第一伞齿轮403的外端,第一伞齿轮403与第二伞齿轮404相啮合,第一丝杆405固定安装在第一伞齿轮403的外端,第二丝杆406固定安装在第二伞齿轮404的外端,第一滑块407活动安装在第一丝杆405的外端,第二滑块408活动安装在第二丝杆406的外端,第一丝杆405与第二丝杆406的长度相同,第一丝杆405与第一滑块407相适配,第二丝杆406与第二滑块408相适配,第一电热压板409固定安装在第一滑块407的外端,第二电热压板410固定安装在第二滑块408的外端,通过设置垃圾打包机构4,垃圾袋315垃圾装满之后,第三电机401带动第三传动轴402、第一伞齿轮403、第二伞齿轮404转动,从而带动第一丝杆405、第二丝杆406转动,从而带动第一电热压板409、第二电热压板410左右、前后交叉运动,从而可以对垃圾袋315进行收口,加热后,垃圾袋315直接断裂脱离掉到垃圾桶1底部,区分框314内部的垃圾袋315在受到垃圾压力时,自然垂落,底部被热压封口,从而可以再次存放垃圾,完成自动打包,垃圾袋315自动放置;第一电热压板409活动安装在第二电热压板410的下端,第一电热压板409与区分框314活动连接,第二电热压板410与区分框314活动连接;垃圾取出机构5包括第四电机501、第四传动轴502、密封门503、液压缸504、输出杆505和推板506,第四电机501固定安装在垃圾桶1的内部,第四电机501的数量为四个,第四传动轴502固定安装在第四电机501传动端的外端,密封门503固定安装在传动轴的外端,密封门503的数量为四个,密封门503与垃圾桶1活动连接,通过设置垃圾取出机构5,打包完成之后,主控制器605控制第四电机501带动第四传动轴502转动,从而带动密封面,液压缸504带动输出杆505和推板506前后运动,将垃圾袋315推出去,即可完成垃圾自动取出;液压缸504固定安装在垃圾桶1的内部,液压缸504的数量为四个,输出杆505固定安装在液压缸504输出端的外端,推板506固定安装在输出杆505的外端;
28.太阳能供电机构6包括太阳能光伏发电板601、底座602、蓄电池603、配电箱604和主控制器605,太阳能光伏发电板601固定安装在垃圾桶1的上端,底座602固定安装在垃圾桶1的下端,蓄电池603固定安装在底座602内部的左侧,配电箱604固定安装在底座602内部
的右侧,主控制器605固定安装在底座602的内部,通过设置太阳能供电机构6,太阳能光伏发电板601将太阳能转化为电脑,存储在蓄电池603中,再由配电箱604为本装置提供电能;太阳能光伏发电板601与蓄电池603之间电性连接,蓄电池603与配电箱604之间电性连接,配电箱604与主控制器605之间电性连接;主控制器605与红外识别模块302之间电性连接,主控制器605与第一电机305之间电性连接,主控制器605与第二电机308之间电性连接,主控制器605与第三电机401之间电性连接,主控制器605与第四电机501之间电性连接。
29.工作原理:首先,太阳能光伏发电板601将太阳能转化为电脑,存储在蓄电池603中,再由配电箱604为本装置提供电能,四个区分框314分别对应的是可回收物、厨余垃圾,有害垃圾和其他垃圾,将垃圾从入口303丢入到垃圾放置框313内部,红外识别模块302对不同种类的垃圾进行识别,并将识别出的信息传输给主控制器605,主控制器605则控制第一电机305带动第一传动轴306以及支撑座307和垃圾放置框313进行旋转,直至垃圾放置框313旋转至与垃圾相匹配的区分框314上方,然后主控制器605控制第二电机308带动第二传动轴309转动,从而带动第一齿轮310与第二齿轮311反向转动,从而可以使得两个闭合的开合板312打开,从而可以将垃圾投入到对应的垃圾袋315中,对垃圾进行自动区分,垃圾袋315垃圾装满之后,第三电机401带动第三传动轴402、第一伞齿轮403、第二伞齿轮404转动,从而带动第一丝杆405、第二丝杆406转动,从而带动第一电热压板409、第二电热压板410左右、前后交叉运动,从而可以对垃圾袋315进行收口,加热后,垃圾袋315直接断裂脱离掉到垃圾桶1底部,区分框314内部的垃圾袋315在受到垃圾压力时,自然垂落,底部被热压封口,从而可以再次存放垃圾,最后,主控制器605控制第四电机501带动第四传动轴502转动,从而带动密封面,液压缸504带动输出杆505和推板506前后运动,将垃圾袋315推出去,即可完成垃圾自动取出。
30.最后应当说明的是,以上内容仅用以说明本发明的技术方案,而非对本发明保护范围的限制,本领域的普通技术人员对本发明的技术方案进行的简单修改或者等同替换,均不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1