一种光伏板接线盒分拣供料机构的制作方法
1.本发明涉及自动化加工设备技术领域,尤其设计具体涉及一种光伏板接线盒分拣供料机构。
背景技术:
2.为了应对传统能源的使用带来的日益严峻的环境污染问题,绿色可再生能源产业近年来得到了快速发展,利用光生伏特效应进行发电的太阳电池发电技术就是备一种重要的绿色能源技术。目前,由多片光伏电池片组合而成的光伏组件作为基本的光伏发电单元被大量使用于建设各种光伏发电系统,在实际使用中,光伏组件产生的电能需要使用光伏组件光伏接线盒引出,并与外部的负载连接。因此,光伏组件光伏接线盒是光伏组件构建各种发电系统的关键部件。在自动化生产中,如何快速地进行接线盒的分拣也就是供料分料是其中关键的一环,也是目前急需解决的技术问题。
技术实现要素:
3.本发明的目的是要提供一种光伏板接线盒分拣供料机构,其有助于自动化加工,可实现对于接线盒自动逐一分拣上料,有效提高光伏接线盒的装配效率。
4.为达到上述目的,本发明采用的技术方案是:本发明提供了一种光伏板接线盒分拣供料机构,包括接线盒供料装置、y向运动模组、x向运动模组、赶料装置和抓取装置,其中:接线盒供料装置,包括放料架,在放料架上固定有多个放置接线盒用的放料杆,每个放料杆之间相平行设置;所述y向运动模组与所述x向运动模组正交装配并联动,所述x向运动模组的运动方向平行于所述放料杆;赶料装置,通过滑动块固定在所述x向运动模组上,并随所述x向运动模组做x方向的运动,用于由所述放料杆的一端向所述放料杆的另一端推动所述接线盒;抓取装置,固定在所述x向运动模组的一端,用于在所述放料杆的另一端抓取接线盒。
5.对于上述技术方案,申请人还有进一步的优化措施。
6.可选地,所述y向运动模组包括固定架、y向电机皮带模组,所述x向运动模组包括连接架和x向电机皮带模组,所述y向电机皮带模组沿所述固定架的长度方向设置,所述连接架与所述固定架滑动配合,并且所述y向电机皮带模组与所述连接架通过皮带连接传动,所述固定架的长度方向垂直于所述连接架的长度方向,所述x向电机皮带模组沿着所述连接架的长度方向设置。
7.进一步地,所述赶料装置设置于连接架的一端,所述抓取装置相对设置于连接架的另一端。
8.可选地,所述赶料装置包括滑动块、上下气缸以及卡爪,所述连接架下方设置有滑
轨,所述滑动块与所述滑轨滑动配合,所述x向电机皮带模组的活动端与所述滑动块相连用于带动所述滑动块沿所述滑轨平移,所述上下气缸与滑动块固定连接,所述上下气缸的动力轴与所述卡爪固定连接。
9.进一步地,所述卡爪上具有开口朝下的u形卡口。
10.可选地,所述抓取装置包括支架、取料气缸、夹爪气缸,所述取料气缸通过支架与所述连接架固定连接,所述取料气缸平行于连接架的长度方向设置,所述取料气缸的动力轴与所述夹爪气缸相连用于带动夹爪气缸平移,所述夹爪气缸的前端具有指向放料杆的夹爪。
11.可选地,所述取料气缸为大行程气缸,取料气缸的活塞杆带动伸缩块往复运动,所述夹爪气缸固定在所述伸缩块的下方。
12.进一步地,所述抓取装置还包括感应器,所述感应器通过门架固定于所述伸缩块朝向放料杆的端部,所述门架跨设在所述夹爪气缸的两侧。
13.更进一步地,所述抓取装置还包括放料气缸和推板,所述放料气缸固定在所述伸缩块的下方,所述放料气缸的动力轴与所述推板固定连接并且朝向所述放料杆,用于在放料工位处横推推板推出所述夹爪气缸处的接线盒。
14.可选地,所述推板竖直设置,所述推板的中部开设有通孔,所述夹爪气缸的夹爪从所述推板上的通孔处穿过,所述放料气缸带动所述推板沿所述连接杆的长度方向前进或者后退。
15.由于上述技术方案运用,本发明与现有技术相比具有下列优点:本发明的光伏板接线盒分拣供料机构,其通过双轴向的运动模组在取料工位与放料工位之间周转,结合多组气缸的设置实现对于接线盒的赶料、取料以及最终的放料,可实现了分拣供料自动化,提高了生产效率,节省人力成本。
附图说明
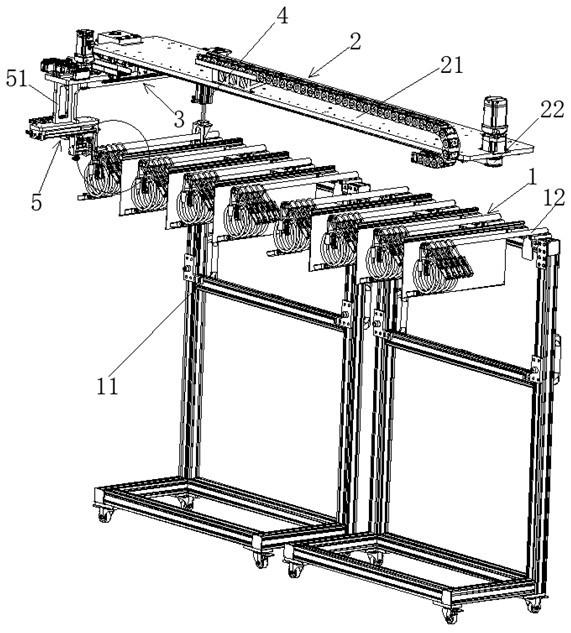
16.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:图1是根据本发明一个实施例的光伏板接线盒分拣供料机构的整体结构示意图;图2为图1所示光伏板接线盒分拣供料机构中的局部放大示意图;图3是根据本发明一个实施例的光伏板接线盒分拣供料机构中取料及放料部分的装置结构示意图;图4是根据本发明一个实施例的光伏板接线盒分拣供料机构中x向运动模组侧的装置结构示意图,重点示出了抓取装置的结构。
17.附图标记说明如下:1、接线盒供料装置,11、放料架,12、放料杆,13、通槽,14、限位销钉;2、y向运动模组,21、固定架,22、y向电机皮带模组;3、x向运动模组,31、连接架,32、x向电机皮带模组,33、滑轨;4、赶料装置,41、滑动块,42、上下气缸,43、卡爪;5、抓取装置,51、支架,52、取料气缸,53、夹爪气缸,54、夹爪,55、感应器,56、门架,
57、伸缩块,58、放料气缸,59、推板。
具体实施方式
18.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
21.本实施例提供了一种光伏板接线盒分拣供料机构,如图1和图2所示,包括接线盒供料装置1、y向运动模组2、x向运动模组3、赶料装置4和抓取装置5,其中:接线盒供料装置1,包括放料架11,在放料架11上固定有多个放置接线盒用的放料杆12,每个放料杆12之间相平行设置。这里的放料架11可采用一般的立架结构即可,还可在放料架11的下方设置滚轮,从而可方便地转移放料架11以及接线盒。放料杆12的端部沿纵向开有通槽13构成u形的端部,这里开槽后能够便于抓取装置5的夹爪54探入从而更方便地抓起接线盒,另外在放料杆12的上部边沿竖直固定有限位销钉14,用于对被赶到端部的接线盒进行限位;所述y向运动模组2与所述x向运动模组3正交装配并联动,所述x向运动模组3的运动方向平行于所述放料杆12;赶料装置4,通过滑动块41固定在所述x向运动模组3上,并随所述x向运动模组3做x方向的运动,用于由所述放料杆12的一端向所述放料杆12的另一端推动所述接线盒;抓取装置5,固定在所述x向运动模组3的一端,与所述赶料装置4相比抓取装置5是固定不动的,用于在所述放料杆12的另一端抓取接线盒。
22.在一实施方式中,如图3所示,所述y向运动模组2包括固定架21、y向电机皮带模组22,所述x向运动模组3包括连接架31和x向电机皮带模组32,所述y向电机皮带模组22沿所述固定架21的长度方向设置,所述连接架31与所述固定架21滑动配合,并且所述y向电机皮带模组22与所述连接架31通过皮带连接传动,所述固定架21的长度方向垂直于所述连接架31的长度方向,所述x向电机皮带模组32沿着所述连接架31的长度方向设置。所述赶料装置4设置于连接架31的一端,所述抓取装置5相对设置于连接架31的另一端。
23.在一实施方式中,如图3所示,所述赶料装置4包括滑动块41、上下气缸42以及卡爪43,所述连接架31下方设置有滑轨33,所述滑动块41与所述滑轨33滑动配合,所述x向电机皮带模组32的活动端与所述滑动块41相连用于带动所述滑动块41沿所述滑轨33平移,所述上下气缸42与滑动块41固定连接,所述上下气缸42的动力轴与所述卡爪43固定连接。所述卡爪43上具有开口朝下的u形卡口。
24.在一实施方式中,如图3和图4所示,所述抓取装置5包括支架51、取料气缸52、夹爪气缸53,所述取料气缸52通过支架51与所述连接架31固定连接,所述取料气缸52平行于连
接架31的长度方向设置,所述取料气缸52的动力轴与所述夹爪气缸53相连用于带动夹爪气缸53平移,所述夹爪气缸53的前端具有指向放料杆12的夹爪54。
25.在一进一步的实施方式中,所述取料气缸52为大行程气缸,取料气缸52的活塞杆带动伸缩块57往复运动抓取装置5伸缩块57支架51连接架31支架51放料杆12伸缩块57伸缩块57取料气缸52伸缩块57,所述夹爪气缸53固定在所述伸缩块57的下方。大行程的气缸能够保证夹爪气缸53能够在取料工位与放料工位间可靠周转,同时伸缩块57的设置,能够抓取装置5便于布置夹爪气缸53以及其余组件。
26.为了检测待抓取的接线盒是否到位,所述抓取装置5还包括感应器55,所述感应器55通过门架56固定于所述伸缩块57朝向放料杆12的端部,所述门架56跨设在所述夹爪气缸53的两侧。
27.在一进一步的实施方式中,如图2和图4所示,所述抓取装置5还包括放料气缸58和推板59,所述放料气缸58固定在所述伸缩块57的下方,所述放料气缸58的动力轴与所述推板59固定连接并且朝向所述放料杆12,用于在放料工位处横推推板59推出所述夹爪气缸53处的接线盒。所述推板59竖直设置,所述推板59的中部开设有通孔,所述夹爪气缸53的夹爪54从所述推板59上的通孔处穿过,所述放料气缸58带动所述推板59沿所述连接杆的长度方向前进或者后退。
28.光伏板接线盒分拣供料机构的工作过程如下:接线盒供料装置1通过人工将对应的正负极线盒按照要求挂在放料架11的放料杆12上,然后将放料架11放置到固定位置上;y向运动模组2固定在小车上方,作用是带动x向运动模组3、赶料装置4以及抓取装置5一起做y向的移动,因为放料架11上有很多放料杆12,y向运动模组2带动x向运动模组3、赶料装置4以及抓取装置5依次到达放料架11车的每个放料杆12上方,而x向运动模组3、赶料装置4以及抓取装置5则将放料杆12上的接线盒依次一个一个的取下来放到指定位置;x向运动模组3带动赶料装置4由所述放料杆12的一端向所述放料杆12的另一端推动所述接线盒,抓取装置5固定在x向运动模组3的连接架31上;赶料装置4在x向运动模组3的带动下到达放料杆12放料的最外端,然后上下气缸42下降,赶料装置4的卡爪43的u型卡口套在放料杆12上,在x向运动模组3的带动下将接线盒向另一端也就是抓取装置5所在的方向推去,赶料装置4将放料杆12上的接线盒赶到抓取装置5中夹爪气缸53的抓取位置,这时感应器55的感应到被接线盒所遮挡,这时赶料装置4停止赶料,夹爪气缸53夹紧接线盒,赶料装置4后退一段距离防止后续接线盒被误推出,取料气缸52收回带走接线盒到指定位置,夹爪气缸53打开,放料气缸58前推,通过推板59将夹爪气缸53上的接线盒推出、放下。
29.综上可知,本发明的光伏板接线盒分拣供料机构,其通过双轴向的运动模组在取料工位与放料工位之间周转,结合多组气缸的设置实现对于接线盒的赶料、取料以及最终的放料,可实现了分拣供料自动化,提高了生产效率,节省人力成本。
30.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1