基于数字孪生的扶梯故障诊断方法与流程
本发明涉及机械故障诊断,尤其涉及一种基于数字孪生的扶梯故障诊断方法。
背景技术:
1、电动扶梯,亦称自动行人电梯,是带有循环运行阶梯的一类扶梯,是用于向上或向下倾斜运送乘客的固定电力驱动设备,常用于商场、天桥、地铁站等公共设施。由于使用人数众多,其安全及维护问题十分重要,而运行过程中由机电系统或传感器记录扶梯运行数据并根据诊断模型进行检测是一种检测故障的重要手段。扶梯运行数据包括电机转速、键相值、电机功率、电机电流等代表运行状态的过程量信号和电机、减速箱、主驱动轮、梯级链涨紧轮等测点的振动信号,以及扶梯运行状态、电机运行状态、扶梯上下行参数、故障码等机电系统信息。
2、扶梯设备的主要故障大部分都是发展性、长期性并有早期表征的故障。通过基于数据驱动和机理知识的现代检测手段往往能够检测到扶梯设备的早期故障或故障预兆,有利于及时提醒相关人员进行夜间停机检维修或临时故障维修,避免恶性事故的发生。依托数字孪生技术建立的扶梯数字样机是具有高价值、高潜力,能反映物理实机真实性的数学模型,值得对其进行数据挖掘和深度分析,二次开发形成上级故障诊断模型可以承担监测扶梯正常运行、提供扶梯维护建议、诊断扶梯故障类型的重大职能。
3、现有物理实机报警系统,主要根据机电系统故障码判定故障或依赖巡检人员根据自身经验对扶梯情况进行评估并实施维护,具有强人工依赖性、强滞后性、故障辨识不明晰导致事后维护目标不明确等不足。
技术实现思路
1、为了解决现有技术的问题,本发明实施例提供了一种基于数字孪生的扶梯故障诊断方法。所述技术方案如下:
2、第一方面,提供了一种基于数字孪生的扶梯故障诊断方法,包括以下步骤:
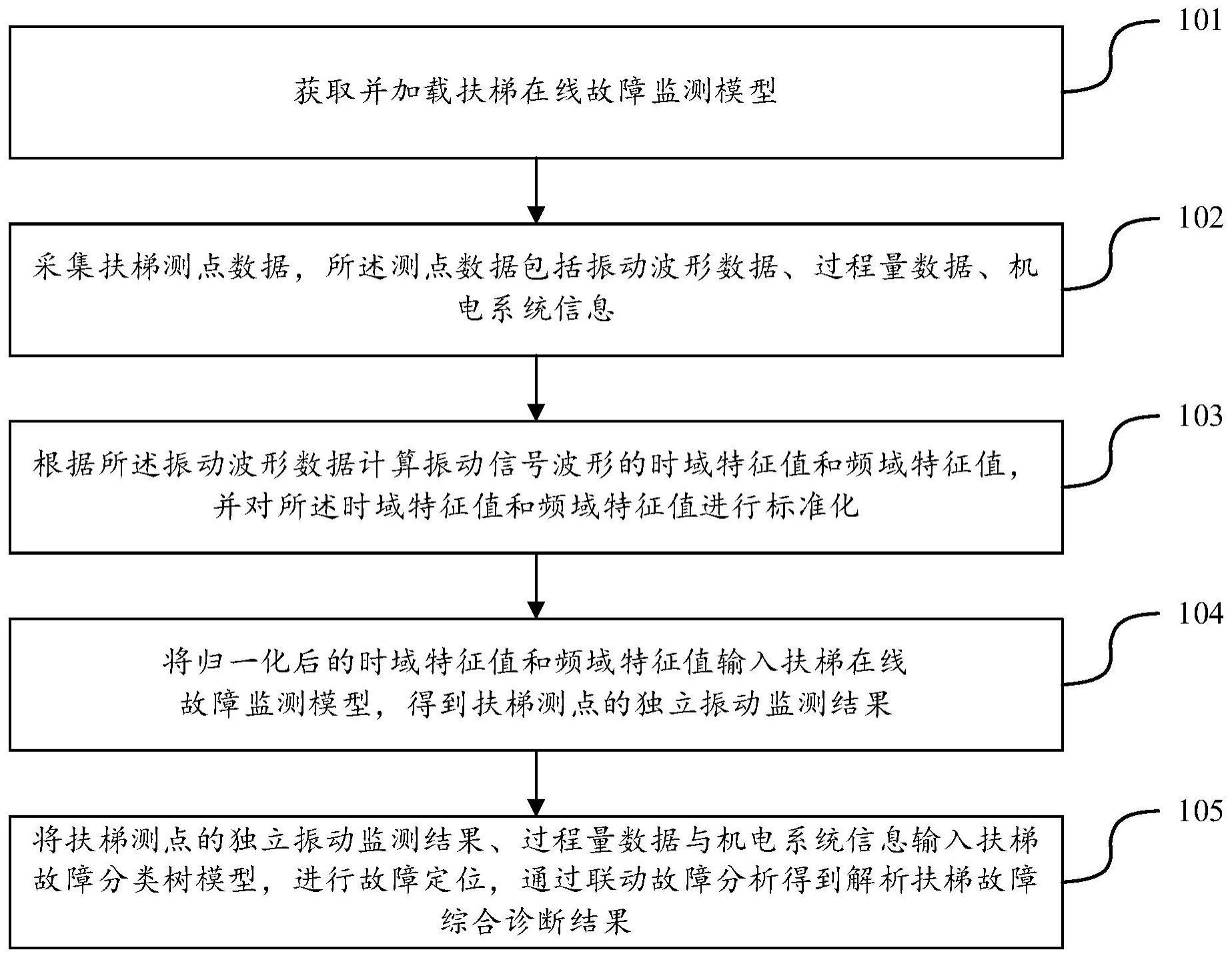
3、获取并加载扶梯在线故障监测模型;
4、采集扶梯测点数据,所述测点数据包括振动波形数据、过程量数据、机电系统信息;
5、根据所述振动波形数据计算振动信号波形的时域特征值和频域特征值,并对所述时域特征值和频域特征值进行归一化;
6、将归一化后的时域特征值和频域特征值输入扶梯在线故障监测模型,得到扶梯测点的独立振动监测结果;
7、将扶梯测点的独立振动监测结果、过程量数据与机电系统信息输入扶梯故障分类树模型,进行故障定位,通过联动故障分析得到解析扶梯故障综合诊断结果。
8、进一步的,在根据所述振动波形数据计算振动信号波形的时域特征值和频域特征值之前,所述方法还包括,对所述测点数据进行预处理,其中,所述预处理包括去噪、滤波、筛除无效点、筛除无键相点、筛除信号异常点。
9、进一步的,所述时域特征值包括:均值、标准差、有效值、峰值、峰峰值、峭度、歪度、波峰因子、峭度系数;所述频域特征值包括:gie特征值、通频频率特征、倍频频率特征、teager能量因子。
10、进一步的,所述扶梯在线故障监测模型通过解析本地数字样机集成数据包,离线式建立,所述建立方法包括:
11、获取并解析扶梯数据样机模型的集成数据包,所述集成数据包包括已经计算完成的测点时域特征值和频域特征值;
12、将所述测点时域特征值和所述频域特征值归一化;
13、将归一化后的测点时域特征值和频域特征值组成特征向量矩阵,剔除其中的极端点;
14、将所述特征向量矩阵输入lof算法,得到离群点检测模型;
15、根据lof无量纲值大小进行排序,得到特征向量矩阵由小到大的lof序列,按照预设比例将数据集分为安全集、中间集和边缘集。
16、进一步的,所述扶梯在线故障监测模型通过采集扶梯数字样机实时数据包,在线式建立,所述建立方法包括:
17、采集扶梯数字样机的实时运行数据,并对所述实时运行数据进行预处理,其中,所述预处理包括去噪、滤波、筛除无效点、筛除无键相点、筛除信号异常点;
18、根据所述预处理后的实时运行数据计算时域特征值和频域特征值,累计扶梯运行振动数据集;
19、当所述振动数据集达到预设数据量后,对所述时域特征值和频域特征值进行归一化;
20、将所述归一化处理后的振动数据集组成特征向量矩阵,剔除其中的极端点;
21、所述特征向量矩阵输入lof算法,得到离群点检测模型;
22、根据lof无量纲值大小进行排序,得到特征向量矩阵由小到大的lof序列,按照预设比例将数据集分为安全集、中间集和边缘集。
23、进一步的,所述将扶梯测点的独立振动监测结果、过程量数据与机电系统信息输入扶梯故障分类树模型,进行故障定位,通过联动故障分析得到解析扶梯故障综合诊断结果,包括:
24、将扶梯各部件振动状态监测结果和过程量数据以及机电系统信息结构归一化,分为离散型特征和连续型特征两部分;
25、使用cart算法建立扶梯故障分类树模型,通过扶梯测点振动信号、过程量信号、机电信息判断测点所属部件的整体状态,进行故障定位;
26、由cart树得到部件运行状态分类后,基于联动故障分析归纳关系表,基于扶梯多部件故障诊断结果,进行扶梯故障源判定,将各类扶梯故障判定为自身故障或联动故障;
27、对于自身故障,直接输出故障诊断结果;
28、对于联动故障,输入部件单个状态反馈信息,通过联动故障分析归纳关系表故障溯源检索找到该故障对应的上、下级扶梯部件,输出故障诊断的综合推断结果。
29、进一步的,所述使用cart算法建立扶梯故障分类树模型,包括:
30、(1)对于当前节点的数据集,如果样本个数小于阈值或没有特征,则返回决策子树,当前节点停止递归;
31、(2)计算数据集的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止递归;
32、(3)计算当前节点现有各个特征的各个值的基尼指数;
33、(4)在得到各个特征的各个值的基尼系数中,选择基尼系数最小的特征及其对应的取值作为最优特征和最优切分点,然后根据最优特征和最优切分点,将本节点的数据集划分成两部分d1和d2,同时生成当前节点的两个子节点,左节点的数据集为d1,右节点的数据集为d2。
34、(5)对左右的子节点递归重复上述步骤(1)-(4),生成扶梯故障分类树模型。
35、进一步的,在生成扶梯故障分类树模型后,所述方法还包括使用代价复杂性法进行剪枝:
36、定义分类树中的每一个非叶子节点计算它的表面误差率增益值
37、
38、其中tt为以t为根节点的子树,|tt|为子树中包含的叶子节点个数,c(t)以t为单节点树的误差代价,该节点被剪枝,c(t)=r(t)×p(t),r(t)为节点t的误差率,p(t)为节点t上的数据占所有户数的比例;c(tt)是tt的误差代价,如果该节点不被剪枝,它等于子树tt上所有叶子节点的误差代价之和,当多个非叶子节点的α值同时达到最小时,取|tt|最大的进行剪枝。
39、本发明实施例提供的技术方案带来的有益效果是:本发明实施例中,获取并加载扶梯在线故障监测模型;采集扶梯测点数据,所述测点数据包括振动波形数据、过程量数据、机电系统信息;根据所述振动波形数据计算振动信号波形的时域特征值和频域特征值,并对所述时域特征值和频域特征值进行归一化;将归一化后的时域特征值和频域特征值输入扶梯在线故障监测模型,得到扶梯测点的独立振动监测结果;将扶梯测点的独立振动监测结果、过程量数据与机电系统信息输入扶梯故障分类树模型,进行故障定位,通过联动故障分析得到解析扶梯故障综合诊断结果。本发明基于数字样机的诊断系统具有自动化程度高、超前预判、故障定位准确、低误报率和零漏报率等优点,解决了现有系统的核心痛点,并在设备报警、预测性维护分析上提供安全可靠的仿真数据支撑。通过数字样机建模的方式对扶梯运行状态进行检测与诊断,及时消除机电系统的隐患,确保了电动扶梯作为公共设施中关键节点的安全性,并对数字孪生系统的落地应用具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!