一种移动式卷料搬运三坐标装置的制作方法
1.本实用新型涉及物料搬运设备,具体地涉及一种移动式卷料搬运三坐标装置。
背景技术:
2.钨钼合金是指由钨和钼所组成的合金。常用的钨钼合金中钨含量为30%~50%(质量)。钨钼合金的制取方法与金属钼材和钼合金相同,即粉末冶金烧结后加工和熔炼加工两种方法,可制取棒、板、丝或其他型材。钨钼合金因具有良好导热、导电、高温强度和耐磨等特性,而成为电子电力设备制造业、金属材料加工业、玻璃制造业、高温炉件结构部件制造、航空航天和国防工业应用的重要材料。钨钼卷材经过冷拉机或热拉机的工段变成更细的钨钼丝,钨钼丝卷料通过卷绕机卷绕在丝框中。
3.agv小车指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车;工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源;一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道来设立其行进路径,电磁轨道黏贴于地板上,agv小车则依靠电磁轨道所带来的讯息进行移动与动作。
4.现有的钨钼卷料丝框预先放在物料周转工装的置物槽,人工从物料周转工装将丝框搬运到推车上,再由人工推着推车运输到指定的地点;或者人工将丝框从推车搬运到物料周转工装,人工搬运是十分枯燥繁琐,效率低下。
技术实现要素:
5.本实用新型要解决的技术问题,在于提供一种移动式卷料搬运三坐标装置,便捷地搬运丝框。
6.本实用新型是这样实现的:一种移动式卷料搬运三坐标装置,包括:
7.机架、横向移动机构、纵向移动机构、竖向移动机构、气动抓手机构与物料周转工装;
8.所述机架包括横梁、左支撑立柱与右支撑立柱,所述左支撑立柱与右支撑立柱分别固设于所述横梁的左右两端;
9.所述横向移动机构包括横向滑轨与第一支座,所述横向滑轨与所述横梁固定连接,所述第一支座与所述横向滑轨滑动连接;
10.所述纵向移动机构包括纵向滑轨与第二支座,所述纵向滑轨与所述第一支座滑动连接,所述第二支座与所述纵向滑轨的一端固定连接;
11.所述竖向移动机构包括竖向滑轨与第三支座,所述竖向滑轨与所述第二支座滑动连接,所述第三支座与所述竖向滑轨的一端固定连接;
12.所述气动抓手机构包括底盘、气动滑块与抓杆,所述底盘与所述第三支座固定连接,所述气动滑块与所述底盘滑动连接,所述抓杆的一端与所述气动滑块固定连接,两个以上的所述气动滑块围绕所述底盘的中心均匀间隔分布,所述气动滑块使所述抓杆具有合并
状态与分散状态;
13.所述物料周转工装位于所述机架的下方,所述物料周转工装的顶部开设有置物槽,所述置物槽用于放置丝框,合并状态的所述抓杆能穿插所述丝框的中心孔,分散状态的所述抓杆能卡住所述丝框的中心孔。
14.进一步地,所述横向移动机构还包括第一伺服电机、第一齿轮与第一齿条,所述第一齿条固设于所述横向滑轨,所述第一伺服电机固设于所述第一支座,所述第一伺服电机的输出轴与所述第一齿轮的中心固定连接,所述第一齿轮与所述第一齿条啮合连接;
15.所述纵向移动机构还包括第二伺服电机、第二齿轮与第二齿条,所述第二齿条固设于所述纵向滑轨,所述第二伺服电机固设于所述第一支座,所述第二伺服电机的输出轴与所述第二齿轮的中心固定连接,所述第二齿轮与所述第二齿条啮合连接;
16.所述竖向移动机构还包括第三伺服电机、第三齿轮与第三齿条,所述第三齿条固设于所述竖向滑轨,所述第三伺服电机固设于所述第二支座,所述第三伺服电机的输出轴与所述第三齿轮的中心固定连接,所述第三齿轮与所述第三齿条啮合连接。
17.进一步地,所述气动滑块与抓杆均有三个。
18.进一步地,所述机架还包括膨胀螺栓,所述左支撑立柱与右支撑立柱均通过各自的所述膨胀螺栓固定于地面。
19.进一步地,还包括:升降推动式agv,位于所述机架的下方;
20.所述升降推动式agv包括agv小车、支架、第一升降驱动机构、定位工装、第二升降驱动机构与隔离挡板,所述支架固设于所述agv小车的顶部,所述第一升降驱动机构固设于所述支架,所述第一升降驱动机构的升降端与所述定位工装固定连接,所述定位工装开设有定位槽,所述定位槽开设有出入口,所述第二升降驱动机构固设于所述支架,所述第二升降驱动机构的升降端与所述隔离挡板固定连接,所述隔离挡板的竖直部滑设于所述出入口,所述隔离挡板的水平部开设有通道,所述定位槽用于放置所述丝框,所述丝框能在所述通道移动。
21.进一步地,所述升降推动式agv还包括支撑板、第一导向杆、基座与第二导向杆,所述支撑板开设有避让口,所述支架开设有第一通孔,所述第一导向杆与所述第一通孔滑动连接,所述第一导向杆的上端与所述支撑板固定连接,所述定位工装与所述支撑板的上表面固定连接,所述第一升降驱动机构的升降端与所述支撑板的下表面固定连接,所述基座位于所述避让口、还与所述支架固定连接,所述基座开设有第二通孔,所述第二导向杆与所述第二通孔滑动连接,所述第二导向杆的上端与所述隔离挡板固定连接。
22.进一步地,所述第一升降驱动机构是第一电动推杆,所述第二升降驱动机构是第二电动推杆。
23.进一步地,所述第一电动推杆、第二电动推杆均与所述agv小车的控制器电连接。
24.本实用新型的优点在于:1、气动抓手机构能在横向、纵向、竖向三个坐标移动位置,气动抓手机构的抓杆伸入丝框的中心孔并卡住,就可以改变丝框的位置,从而便捷地搬运丝框,提高搬运效率。2、升降推动式agv可以调节定位工装的高度,便于跟气动抓手机构对接丝框。3、由升降推动式agv运输丝框到指定的位置,取代人工推车搬运,提高运输效率。4、隔离挡板防止丝框在搬运过程中从定位工装中掉落。
附图说明
25.下面参照附图结合实施例对本实用新型作进一步的说明。
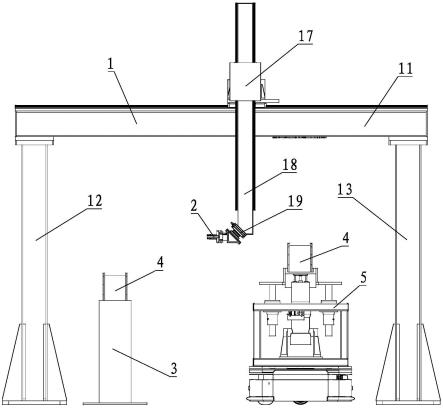
26.图1是本实用新型的移动式卷料搬运三坐标装置的结构示意图。
27.图2是本实用新型中横向移动机构、纵向移动机构与竖向移动机构的结构示意图。
28.图3是本实用新型中伺服电机与齿条的位置示意图。
29.图4是本实用新型中气动抓手机构的抓杆卡住丝框的中心孔的示意图。
30.图5是本实用新型中气动抓手机构的平面主视图。
31.图6是图5的左视图。
32.图7是图6中抓杆由底盘外沿向中心滑动的示意图。
33.图8是本实用新型中物料周转工装的结构示意图。
34.图9是本实用新型中丝框放置在置物槽的示意图。
35.图10是本实用新型中升降推动式agv的结构示意图一。
36.图11是本实用新型中升降推动式agv的结构示意图二。
37.图12是本实用新型中第一升降驱动机构、支撑板与定位工装的位置示意图。
38.图13是本实用新型中第二升降驱动机构、隔离挡板与第二导向杆的位置示意图。
39.图14是本实用新型中隔离挡板挡住定位工装的定位槽的示意图。
40.图15是本实用新型中隔离挡板的通道与定位槽连通的示意图。
41.附图标记:机架1;横梁11;左支撑立柱12;右支撑立柱13;横向滑轨14;第一支座15;纵向滑轨16;第二支座17;竖向滑轨18;第三支座19;伺服电机110;齿条120;气动抓手机构2;底盘21;气动滑块22;抓杆23;物料周转工装3;置物槽31;丝框4;中心孔41;升降推动式agv5;agv小车51;支架52;第一升降驱动机构53;定位工装54;定位槽541;出入口542;第二升降驱动机构55;隔离挡板56;竖直部561;水平部562;通道563;支撑板57;避让口571;第一导向杆58;基座59;第二导向杆510;接料台6。
具体实施方式
42.本实用新型实施例通过提供一种移动式卷料搬运三坐标装置,解决了现有技术中人工搬运丝框效率低的缺点,实现了提高搬运效率的技术效果。
43.本实用新型实施例中的技术方案为解决上述问题,总体思路如下:气动抓手机构能在横向、纵向、竖向三个坐标移动位置,气动抓手机构的抓杆具有合并状态与分散状态,合并状态的抓杆能穿插丝框的中心孔,分散状态的抓杆再卡住丝框的中心孔,然后就可以改变丝框的位置,从而便捷地搬运丝框。丝框从物料周转工装的置物槽被气动抓手机构搬运至升降推动式agv的定位工装的定位槽,升降推动式agv就沿着指定的路线运输丝框到下一个工序区域。
44.为了更好地理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
45.参阅图1至图15,本实用新型的优选实施例。
46.一种移动式卷料搬运三坐标装置,包括:机架1、横向移动机构、纵向移动机构、竖向移动机构、气动抓手机构2与物料周转工装3;所述机架1包括横梁11、左支撑立柱12与右支撑立柱13,所述左支撑立柱12与右支撑立柱13分别固设于所述横梁11的左右两端;所述
机架1还包括膨胀螺栓,所述左支撑立柱12与右支撑立柱13均通过各自的所述膨胀螺栓固定于地面;提高机架1的支撑稳定性。
47.所述横向移动机构包括横向滑轨14与第一支座15,所述横向滑轨14与所述横梁11固定连接,所述第一支座15与所述横向滑轨14滑动连接;所述横向移动机构还包括第一伺服电机、第一齿轮与第一齿条,所述第一齿条固设于所述横向滑轨14,所述第一伺服电机固设于所述第一支座15,所述第一伺服电机的输出轴与所述第一齿轮的中心固定连接,所述第一齿轮与所述第一齿条啮合连接;第一伺服电机控制第一齿轮旋转,第一齿轮与第一齿条配合,使第一支座15在横向滑轨14上滑动。
48.所述纵向移动机构包括纵向滑轨16与第二支座17,所述纵向滑轨16与所述第一支座15滑动连接,所述第二支座17与所述纵向滑轨16的一端固定连接;所述纵向移动机构还包括第二伺服电机、第二齿轮与第二齿条,所述第二齿条固设于所述纵向滑轨16,所述第二伺服电机固设于所述第一支座15,所述第二伺服电机的输出轴与所述第二齿轮的中心固定连接,所述第二齿轮与所述第二齿条啮合连接;第二伺服电机控制第二个齿轮旋转,第二齿轮与第二齿条配合,使纵向滑轨16在第一支座15上滑动。
49.所述竖向移动机构包括竖向滑轨18与第三支座19,所述竖向滑轨18与所述第二支座17滑动连接,所述第三支座19与所述竖向滑轨18的一端固定连接;所述竖向移动机构还包括第三伺服电机110、第三齿轮与第三齿条120,所述第三齿条120固设于所述竖向滑轨18,所述第三伺服电机110固设于所述第二支座17,所述第三伺服电机110的输出轴与所述第三齿轮的中心固定连接,所述第三齿轮与所述第三齿条120啮合连接。第三伺服电机110控制第三齿轮旋转,第三齿轮与第三齿条配合,使竖向滑轨18在第二支座17上滑动。
50.所述气动抓手机构2包括底盘21、气动滑块22与抓杆23,所述底盘21与所述第三支座19固定连接,所述气动滑块22与所述底盘21滑动连接,所述抓杆23的一端与所述气动滑块22固定连接,两个以上的所述气动滑块22围绕所述底盘21的中心均匀间隔分布,所述气动滑块22使所述抓杆23具有合并状态与分散状态;所述气动滑块22与抓杆23均有三个。参考现有的气动三爪卡盘的工作原理,气动滑块22在底盘21的中心与外沿之间来回滑动,气动滑块22带动抓杆23,当三个抓杆23都位于底盘21中心时,为合并状态;当三个抓杆23都远离底盘21中心时,为分散状态。
51.所述物料周转工装3位于所述机架1的下方,所述物料周转工装3的顶部开设有置物槽31,所述置物槽31用于放置丝框4,合并状态的所述抓杆23能穿插所述丝框4的中心孔41,分散状态的所述抓杆23能卡住所述丝框4的中心孔41。在横向移动机构、纵向移动机构与竖向移动机构的调度下,位于第三支座19的气动抓手机构2能在横向、纵向、竖向三个坐标移动位置,气动抓手机构2先靠近位于物料周转工装3上的丝框4,合并状态的抓杆23穿插丝框4的中心孔41,接着抓杆23再变成分散状态并卡住丝框4的中心孔41,气动抓手机构2就可以搬运丝框4到指定位置,便捷高效。
52.还包括:升降推动式agv5,位于所述机架1的下方;所述升降推动式agv5包括agv小车51、支架52、第一升降驱动机构53、定位工装54、第二升降驱动机构55与隔离挡板56,agv小车51是现有的潜伏式agv小车;所述支架52固设于所述agv小车51的顶部,所述第一升降驱动机构53固设于所述支架52,所述第一升降驱动机构53的升降端与所述定位工装54固定连接,所述定位工装54开设有定位槽541,所述定位槽541开设有出入口542,所述第二升降
驱动机构55固设于所述支架52,所述第二升降驱动机构55的升降端与所述隔离挡板56固定连接,所述隔离挡板56的竖直部561滑设于所述出入口542,所述隔离挡板56的水平部562开设有通道563,所述定位槽541用于放置所述丝框4,所述丝框4能在所述通道563移动。升降推动式agv5沿着预设的路线移动至机架1下方,第一升降驱动机构53调节定位工装54的高度,便于跟气动抓手机构2对接丝框4;气动抓手机构2将丝框4搬运至升降推动式agv5的定位槽541,此时气动抓手机构2的抓杆23变为合并状态,抓杆23再离开丝框4的中心孔41。隔离挡板56上升挡住定位槽541的出入口542,隔离挡板56防止丝框4在搬运过程中从定位工装54中掉落。放置好丝框4后,升降推动式agv5就沿着预定的路线移动至下一道工序位置,在到达目的地后,升降推动式agv5的第一升降驱动机构53调节定位工装54的高度,使定位工装54与现有的接料台6对应,升降推动式agv5的第二升降驱动机构55使隔离挡板56下降,隔离挡板56的水平部562的通道563与定位槽541连通,工作人员就可以推动丝框4或者通过现有的推动装置,将丝框4就从定位槽541沿着通道563推到接料台6。最后升降推动式agv5再回到机架1的下方等待接收丝框4。由升降推动式agv5运输丝框4到指定的位置,取代人工推车搬运,提高运输效率。
53.所述升降推动式agv5还包括支撑板57、第一导向杆58、基座59与第二导向杆510,所述支撑板57开设有避让口571,所述支架52开设有第一通孔,所述第一导向杆58与所述第一通孔滑动连接,所述第一导向杆58的上端与所述支撑板57固定连接,所述定位工装54与所述支撑板57的上表面固定连接,所述第一升降驱动机构53的升降端与所述支撑板57的下表面固定连接,所述基座59位于所述避让口571、还与所述支架52固定连接,所述基座59开设有第二通孔,所述第二导向杆510与所述第二通孔滑动连接,所述第二导向杆510的上端与所述隔离挡板56固定连接。第一导向杆58提高定位工装54在升降运动时的稳定性,第二导向杆510提高在隔离挡板56在升降运动时的稳定性。
54.所述第一升降驱动机构53是第一电动推杆,所述第二升降驱动机构55是第二电动推杆。所述第一电动推杆、第二电动推杆均与所述agv小车51的控制器电连接。升降推动式agv5到达指定位置后,agv小车51的控制器自动控制第一电动推杆与第二电动推杆的运行状态,相应地调整定位工装54的高度以及隔离挡板56的位置,提高效率。
55.本实用新型的移动式卷料搬运三坐标装置的工作方式:(1)气动抓手机构2移动到物料周转工装3的位置,然后抓取位于置物槽31上的丝框4,再将丝框4搬运到升降推动式agv5的定位槽541。升降推动式agv5沿着预定路线运输丝框4到达下一道工序区域,第一升降驱动机构53调整定位工装54的高度,与现有的接料台6对准,第二升降驱动机构55调节隔离挡板56的位置,使隔离挡板56的水平部562的通道563与定位槽541连通,推动丝框4,丝框4从定位槽541沿着通道563进入接料台6。(2)另一种方式,升降推动式agv5的定位槽541先放置了丝框4,升降推动式agv5移动至机架1的下方,气动抓手机构2移动到升降推动式agv5的位置,气动抓手机构2抓取定位槽541上的丝框4,然后搬运到物料周转工装3的置物槽31。
56.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1