晶圆搬运机的制作方法
1.本实用新型涉及晶圆加工设备技术领域,特别涉及一种晶圆搬运机。
背景技术:
2.在半导体行业,晶圆以及led蓝宝石基片等的清洗和刻蚀、去胶等工艺制程中,经常会需要晶圆的传输。晶圆搬运机构是晶圆传输系统的核心部分,在半导体行业中起到了举足轻重的作用。在整个晶圆的加工制造过程中,晶圆传输机构贯穿始终。然而,在现有技术中,晶圆搬运机构仅能同时搬运同一尺寸的晶圆,当操作者需要更换待搬运的晶圆的尺寸时需要对设备的控制参数进行调整并需要对设备进行调试,存在工作效率低的缺陷。
技术实现要素:
3.根据本实用新型实施例,提供了一种晶圆搬运机,包含:晶圆分拣模块、第一机械手与晶圆存放模块;
4.晶圆分拣模块设置在第一机械手的一侧,用于分拣晶圆;
5.晶圆存放模块设置在第一机械手的另一侧,用于存放晶圆。
6.进一步,晶圆分拣模块包含:晶圆盒、包装放置盒、晶圆放置托盘与第二机械手;
7.晶圆盒设置在第一机械手的一侧,用于存放带有晶圆垫的晶圆;
8.包装放置盒设置在第一机械手的一侧,用于存放晶圆垫;
9.晶圆放置托盘设置在第一机械手的一侧,包装放置盒与晶圆盒、包装放置盒呈一字排列,用于盛放晶圆;
10.第二机械手设置在晶圆盒、包装放置盒与晶圆放置托盘的一侧,用于将晶圆垫分拣至包装放置盒内,并将晶圆分拣至晶圆放置托盘上。
11.进一步,包装放置盒中设有第一位置传感器,第一位置传感器与第二机械手电性连接,用于感应包装放置盒内的晶圆垫的高度。
12.进一步,第二机械手包含:第一直线模组、连接件、第二直线模组、抓取件与颜色传感器;
13.第一直线模组并行设置在晶圆盒、包装放置盒与晶圆放置托盘的一侧;
14.连接件设置在第一直线模组的执行端;
15.第二直线模组设置在连接件上;
16.抓取件设置在第二直线模组的执行端;
17.颜色传感器设置在抓取件上,颜色传感器与第一直线模组电性连接,用于识别晶圆垫。
18.进一步,第二机械手还包含:第二位置传感器,第二位置传感器设置在机械手上,第二位置传感器与第二直线模组电性连接,用于感应抓取件与晶圆、晶圆垫的间距。
19.进一步,抓取件包含:执行支架与若干列吸盘;
20.执行支架设置在第二直线模组的执行端;
21.若干列吸盘呈圆形阵列分布在执行支架的执行端,用于抓取晶圆。
22.进一步,晶圆放置托盘包含:承载支架与若干对限位板;
23.承载支架设置在第一机械手的一侧;
24.若干对限位板对称设置在承载支架的顶部,位于同一侧的若干个限位板呈阶梯状分布,若干对限位板的间距依次递减,用于盛放不同尺寸的晶圆。
25.进一步,晶圆存放模块包含:上料支架与若干个备料盒;
26.上料支架设置在第一机械手的另一侧;
27.若干个备料盒设置在上料支架上,用于存放不同尺寸的晶圆。
28.根据本实用新型实施例的晶圆搬运机,通过晶圆分拣模块、第一机械手与晶圆存放模块之间相互配合,实现了对不同尺寸的晶圆进行搬运,具有工作效率高、良品率高的特点。
29.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
附图说明
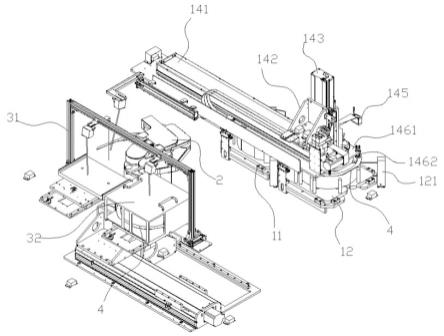
30.图1为根据本实用新型实施例晶圆搬运机的第一视角的立体图;
31.图2为根据本实用新型实施例晶圆搬运机的第二视角的立体图。
具体实施方式
32.以下将结合附图,详细描述本实用新型的优选实施例,对本实用新型做进一步阐述。
33.首先,将结合图1~2描述根据本实用新型实施例的晶圆搬运机,用于搬运晶圆4,其应用场景广阔。
34.如图1所示,本实用新型实施例的晶圆搬运机,包含:晶圆分拣模块、第一机械手2与晶圆存放模块块。
35.具体地,如图1所示,晶圆分拣模块设置在第一机械手2的一侧,用于分拣晶圆4。
36.进一步,如图1所示,晶圆分拣模块包含:晶圆盒11、包装放置盒12、晶圆放置托盘与第二机械手;晶圆盒11设置在第一机械手2的一侧,用于存放带有晶圆垫(图上未示出)的晶圆4;包装放置盒12设置在第一机械手2的一侧,用于存放晶圆垫;晶圆放置托盘设置在第一机械手2的一侧,包装放置盒与晶圆盒11、包装放置盒12呈一字排列,用于盛放晶圆4;第二机械手设置在晶圆盒11、包装放置盒12与晶圆放置托盘的一侧,用于将晶圆垫分拣至包装放置盒12内,并将晶圆4分拣至晶圆放置托盘上。
37.进一步,如图1所示,包装放置盒12中设有第一位置传感器121,第一位置传感器121与第二机械手电性连接,用于感应包装放置盒12内的晶圆垫的高度,避免本实施例在搬运的过程中发生撞件。
38.进一步,如图1所示,第二机械手包含:第一直线模组141、连接件142、第二直线模组143、抓取件与颜色传感器144;第一直线模组141并行设置在晶圆盒11、包装放置盒12与晶圆放置托盘的一侧;连接件142设置在第一直线模组141的执行端;第二直线模组143设置在连接件142上;抓取件设置在第二直线模组143的执行端;颜色传感器144设置在抓取件
上,颜色传感器144与第一直线模组141电性连接,用于识别晶圆垫的颜色,从而辨别待搬运物是晶圆4还是晶圆垫,以及区分该晶圆垫对应的晶圆4的尺寸,提高了本实施例的工作效率。
39.进一步,如图1所示,第二机械手还包含:第二位置传感器145,第二位置传感器145设置在机械手上,第二位置传感器145与第二直线模组143电性连接,用于感应抓取件与晶圆4、晶圆垫的间距,避免本实施例在搬运的过程中发生撞件,提高了本实施例的良品率。
40.进一步,如图1所示,抓取件包含:执行支架1461与若干列吸盘1462;执行支架1461设置在第二直线模组143的执行端;若干列吸盘1462呈圆形阵列分布在执行支架1461的执行端,用于抓取不同尺寸的晶圆4,使本实施例适于搬运不同尺寸的晶圆4,提高了本实施例的工作效率。
41.进一步,如图1所示,晶圆放置托盘包含:承载支架131与若干对限位板132;承载支架131设置在第一机械手2的一侧;若干对限位板132对称设置在承载支架131的顶部,位于同一侧的若干个限位板132呈阶梯状分布,若干对限位板132的间距依次递减,用于盛放不同尺寸的晶圆4,使本实施例适于搬运不同尺寸的晶圆4,提高了本实施例的工作效率。
42.具体地,如图1~2所示,晶圆存放模块块设置在第一机械手2的另一侧,用于存放晶圆4。
43.进一步,如图2所示,晶圆存放模块块包含:上料支架31与若干个备料盒32。
44.当设备运行时,使用者将带有晶圆垫的若干个晶圆4放置于晶圆盒11内,相邻的晶圆4之间夹一张晶圆垫,首先,第一直线模组141驱动第二直线模组143移动到晶圆盒11的上方,第二直线模组143驱动抓取件下降,第二位置传感器145感应抓取件与晶圆4或晶圆垫之间的最短距离,第二位置传感器145发出反馈信息使夹取件下降至合适的位置,颜色传感器144对晶圆垫的颜色进行识别,当颜色传感器144识别到晶圆垫时,颜色传感器144发出一种反馈信息,抓取件控制吸盘吸住晶圆垫,第二直线模组143返回初始位置,第一直线模组141驱动第二直线模组143位移至包装放置盒12的上方,第二直线模组143驱动夹取件下降,第一位置传感器121感应到包装放置盒12内的晶圆垫的高度并发出反馈信息,使夹持晶圆垫的夹取件下降至合适的高度,夹取件控制吸盘将晶圆垫放置于包装放置盒12中,第二直线模组143带动夹取件返回初始位置;当颜色传感器144识别到晶圆4时,颜色传感器144发出另一种反馈信息,抓取件控制吸盘吸住晶圆4,第二直线模组143带动夹取件返回初始位置,第一直线模组141驱动第二直线模组143位移至晶圆放置托盘的上方,第二直线模组143驱动夹取件下降至预设高度,夹取件控制吸盘将晶圆4放置于包装放置盒12中对应的限位板132上,第二直线模组143带动夹取件返回初始位置;然后,第一机械手2夹取晶圆放置托盘中的晶圆4并将晶圆4转移至对应型号的备料盒32中。
45.以上,参照图1~2描述了根据本实用新型实施例的晶圆搬运机,通过晶圆分拣模块、第一机械手2与晶圆存放模块块之间相互配合,实现了对不同尺寸的晶圆4进行搬运,具有工作效率高、良品率高的特点。
46.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括
所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
47.尽管本实用新型的内容已经通过所述优选实施例作了详细介绍,但应当认识到所述的描述不应被认为是对本实用新型的限制。在本领域技术人员阅读了所述内容后,对于本实用新型的多种修改和替代都将是显而易见的。因此,本实用新型的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1