一种红外感应控制的智能垃圾桶的制作方法
1.本实用新型涉及智能垃圾桶技术领域,特别是涉及一种红外感应控制的智能垃圾桶。
背景技术:
2.进入21世纪以来,人们在科技上具有很大的进步,在生活中的日用品上体现的十分透彻,越来越多产品走向智能化,智能产品极大的方便人们的生活,其中智能垃圾桶因其卫生、接触少的特点,在当下发展的尤为迅速。
3.人们在进食瓜子等食品时,需要频繁使用智能垃圾桶,需要使智能垃圾桶的桶盖保持常开状态,否则使用十分不便,但是现有的智能垃圾桶保持桶盖常开状态需要手动按键才能实现,人手需要与垃圾桶表面接触,加大了细菌感染的风险,为此提出一种红外感应控制的智能垃圾桶。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供一种红外感应控制的智能垃圾桶,有利于提高装置的实用性,减少在频繁使用智能垃圾桶时人手与智能垃圾桶接触,降低细菌感染的风险,相对于传统的智能垃圾桶更加安全、干净卫生。
5.为解决上述技术问题,本实用新型提供如下技术方案:一种红外感应控制的智能垃圾桶,包括大翻盖,所述大翻盖内铰接固定有旋转角码,所述旋转角码端部穿过大翻盖固定连接有小翻盖,所述小翻盖与大翻盖顶部活动连接,所述大翻盖下方设有桶身,所述大翻盖顶部一侧设有红外感应区,所述大翻盖底部固定安装有翻盖底座,所述翻盖底座顶部一侧固定安装有红外感应组件,所述红外感应组件位于所述大翻盖内,所述红外感应组件位置与所述红外感应区位置对应,所述大翻盖内靠近所述旋转角码一侧设有驱动组件,所述驱动组件传动连接旋转角码,所述红外感应组件电气连接所述驱动组件。
6.优选的,所述红外感应区包括第一红外感应区和第二红外感应区,所述第一红外感应区位于所述大翻盖一侧顶部,所述第二红外感应区位于所述大翻盖表面一侧,所述第一红外感应区与第二红外感应区位于所述大翻盖同一侧。
7.优选的,所述大翻盖表面一侧设有控制按钮,所述控制按钮位于所述第二红外感应区上方。
8.优选的,所述红外感应组件包括固定安装于所述翻盖底座顶部的红外支架,所述红外支架上固定安装有电路板,所述电路板中部设有控制开关,所述红外支架顶部并排设置有第一红外发射灯和第一红外接收灯,所述红外支架中部并排设置有第二红外发射灯和第二红外接收灯,所述第二红外发射灯和第二红外接收灯位于所述控制开关下方,所述控制开关、第一红外发射灯、第二红外发射灯、第一红外接收灯和第二红外接收灯均电气连接电路板。
9.优选的,所述第一红外发射灯和第一红外接收灯位置与所述第一红外感应区位置
对应,所述第二红外发射灯和第二红外接收灯位置与所述控制按钮位置对应,所述控制开关位置与所述控制按钮位置对应。
10.优选的,所述第一红外发射灯、第二红外发射灯、第一红外接收灯和第二红外接收灯的工作面均为扇形。
11.优选的,驱动组件包括伺服电机,所述伺服电机输出端同轴固定有驱动齿轮,所述旋转角码内侧设有啮合齿,所述驱动齿轮与所述啮合齿啮合。
12.优选的,所述伺服电机表面贴合有固定架,所述固定架通过螺栓与所述大翻盖固定。
13.优选的,所述翻盖底座一侧与所述桶身顶部铰接固定,所述翻盖底座底部与所述桶身顶部活动卡接。
14.本实用新型的红外感应控制的智能垃圾桶的工作原理为:在使用智能垃圾桶时,红外感应控制的工作原理为:用一物体通过第一红外感应区或者第二红外感应区,物体阻挡红外发射灯发射的扇形红外线,红外线接触物体后反射,部分进入红外接收灯的工作面内,被红外接收灯接收,红外发射灯和红外接收灯形成回路,导通伺服电机电路,伺服电机启动转动,带动驱动齿轮传动旋转角码旋转,带动小翻盖翻起,小翻盖到位后,物体已经通过红外感应区,伺服电机电路切断,小翻盖受重力作用下落复位,若物体一直处于红外感应区,电路持续导通,小翻盖到位后,伺服电机停止,并对小翻盖进行限位,保持智能垃圾桶桶盖常开;按钮控制的工作原理为:按动控制按钮,控制按钮触发控制开关,控制开关导通电路启动伺服电机,伺服电机带动驱动齿轮转动,驱动齿轮传动旋转角码转动,带动小翻盖翻起,小翻盖到位后静置,伺服电机断电,小翻盖在重力作用下复位。
15.与现有技术相比,本实用新型能达到的有益效果是:
16.1、通过设置在大翻盖内的红外感应组件,并将其与驱动组件电气连接,在有物体位于红外感应区时,触发红外感应组件,从而控制驱动组件启动,带动小翻盖翻起打开,完成小翻盖的开合,减少了人手与智能垃圾桶的接触,降低了细菌感染的风险,有利于提高装置的实用性,使用更加干净卫生;
17.2、通过将第一红外发射灯、第二红外发射灯、第一红外接收灯和第二红外接收灯的工作面设为扇形,有利于提高装置的实用性,使装置能很好的触发,设置两组红外发射灯和红外接收灯,进一步提高智能垃圾桶使用的便捷性。
附图说明
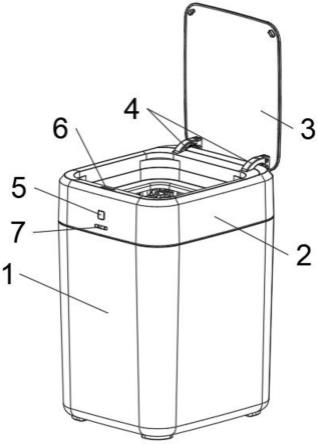
18.图1为实施例中一种红外感应控制的智能垃圾桶的整体结构示意图;
19.图2为实施例中一种红外感应控制的智能垃圾桶的整体结构爆炸视图;
20.图3为实施例中一种红外感应控制的智能垃圾桶的图2所示a处结构示意图;
21.图4为实施例中一种红外感应控制的智能垃圾桶的红外感应组件结构示意图;
22.图5为实施例中一种红外感应控制的智能垃圾桶的大翻盖内部结构示意图;
23.其中:1、桶身;2、大翻盖;3、小翻盖;4、旋转角码;41、啮合齿;5、控制按钮;6、第一红外感应区;7、第二红外感应区;8、红外感应组件;81、红外支架;82、电路板;83、控制开关;84、第一红外发射灯;85、第二红外发射灯;86、第一红外接收灯;87、第二红外接收灯;9、翻盖底座;10、伺服电机;11、固定架;12、驱动齿轮。
具体实施方式
24.下面结合说明书附图1-5,通过具体实施例进行阐述,说明本实用新型的技术方案。
25.实施例:
26.如图1所示,本实用新型提供的一种红外感应控制的智能垃圾桶,包括大翻盖2,大翻盖2内部铰接有旋转角码4,旋转角码4端部穿过大翻盖2固定连接有小翻盖3,小翻盖3与大翻盖2顶部活动连接,大翻盖2一侧设有红外感应区,红外感应区包括第一红外感应区6和第二红外感应区7,第一红外感应区6位于大翻盖2顶部,第二红外感应区7位于大翻盖2表面一侧,第一红外感应区6和第二红外感应区7位于大翻盖2同一侧,大翻盖2靠近第二红外感应区7一侧固定安装有控制按钮5,第二红外感应区7位于控制按钮5下方,大翻盖2下方设有桶身1。
27.如图2所示,大翻盖2底部卡接固定有翻盖底座9,翻盖底座9一侧与桶身1铰接固定,翻盖底座9底部与桶身1顶部活动卡接,翻盖底座9顶部一侧固定安装有红外感应组件8,红外感应组件8位于大翻盖2内,分别与控制按钮5、第一红外感应区6、第二红外感应区7位置对应;结合图2,从图3中可以看出,旋转角码4上设有啮合齿41。
28.如图4所示,红外感应组件8包括固定安装于翻盖底座9顶部的红外支架81,红外支架81上固定安装有电路板82,电路板82中部设有控制开关83,红外支架81顶部并排设置有第一红外发射灯84和第一红外接收灯86,红外支架81中部并排设置有第二红外发射灯85和第二红外接收灯87,第二红外发射灯85和第二红外接收灯87位于控制开关83下方,控制开关83、第一红外发射灯84、第二红外发射灯85、第一红外接收灯86和第二红外接收灯87均电气连接电路板82。
29.所述第一红外发射灯84、第二红外发射灯85、第一红外接收灯86和第二红外接收灯87的工作面均为扇形。
30.结合图1、图2和图4,第一红外发射灯84和第一红外接收灯86位置与第一红外感应区6位置对应,第二红外发射灯85和第二红外接收灯87位置与第二红外感应区7位置对应,控制开关83位置与控制按钮5位置对应。
31.如图5所示,大翻盖2内靠近旋转角码4一侧安装有驱动组件,驱动组件包括伺服电机10,伺服电机10表面设有固定架11,固定架11通过螺栓与大翻盖2固定,伺服电机10输出端同轴固定安装有驱动齿轮12,驱动齿轮12与啮合齿41啮合,红外感应组件8电气连接伺服电机10。
32.工作步骤:
33.一、需要短暂使用智能垃圾桶时,工作步骤如下:
34.红外感应方式:
35.s1、首先对智能垃圾桶通电,通电后红外感应组件8保持工作状态,第一红外发射灯84发射扇形红外线分别从第一红外感应区6位置透出大翻盖2外部;
36.s2、用一物体通过第一红外感应区6的感应区,第一红外发射灯84发射的扇形红外线,被通过第一红外感应区6感应区的物体阻挡,红外线发生反射,进入第一红外接收灯86的工作面内被第一红外接收灯86接收;
37.s3、第一红外发射灯84和第一红外接收灯86间形成闭环回路,导通电路启动伺服
电机10,伺服电机10转动带动驱动齿轮12转动,传动旋转角码4绕旋转角码4与大翻盖2的铰接点转动,带动小翻盖3翻起,垃圾桶打开;
38.s4、小翻盖3运动到位后,物体离开第一红外感应区6的感应区,第一红外发射灯84和第一红外接收灯86不能形成回路,伺服电机10自动断电停止,小翻盖3在重力作用下下落复位。
39.第二红外感应区7、第二红外发射灯85和第二红外接收灯87的工作步骤与上述步骤相同,在此不做赘述。
40.按键控制方式:
41.s1、首先对智能垃圾桶通电,通电后红外感应组件8保持工作状态,按动控制按钮5,控制按钮5触发红外感应组件8上的控制开关83;
42.s2、控制开关83导通电路启动伺服电机10,伺服电机10转动带动驱动齿轮12转动,驱动齿轮12传动旋转角码4绕与大翻盖2的铰接点转动,带动小翻盖3翻起,垃圾桶打开;
43.s3、小翻盖3运动到位后,伺服电机10自动断电停止,小翻盖3在重力作用下下落复位。
44.二、需要使智能垃圾桶桶盖常开时,
45.红外感应方式的工作步骤与上述红外感应方式的工作步骤不同之处在于:物体持续位于第一红外感应区6或第二红外感应区7的感应区内,持续的对第一红外发射灯84和第二红外发射灯85发射的扇形红外线进行反射,第一红外接收灯86和第二红外接收灯87持续接收,电路持续为导通状态,伺服电机10启动带动驱动齿轮12转动,驱动齿轮12通过旋转角码4带动小翻盖3翻起,小翻盖3运动到位后,伺服电机10停止转动,并限制伺服电机10的输出端反转,保持小翻盖3是常开状态,若需要关闭垃圾桶,将物体从第一红外感应区6或第二红外感应区7的感应区移开,电路回路切断,伺服电机10断电后失去对小翻盖3的限位作用,小翻盖3在重力作用下下落复位。
46.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1