一种自动化电磁搬运系统的制作方法
1.本实用新型涉及电磁吸吊搬运技术领域,具体来说,涉及一种自动化电磁搬运系统。
背景技术:
2.随着社会的快速发展,加快发展智能制造,是培育我国经济增长新动能的必由之路,是抢占未来经济和科技发展制高点的战略选择,对于推动我国制造业供给侧结构性改革,打造我国制造业竞争新优势,实现制造强国具有非常重要战略意义。结合我国工业现状来看,未来十年,中国工业智能化领域将有充足发展的是智能工厂。
3.磁力吊具是目前冶金领域最重要的物料搬运方式,一般由电磁铁或永磁铁或电永磁铁、控制系统、横梁、动力与控制电缆等组成。其搬运过程一般由天车操作工与地面吊装工共同实施操作,功能无法集成,作业过程繁琐,故障率高,安全性不够,无法进行分拣作业,无法满足智能工厂对搬运系统的要求。
4.针对上述问题,如何使物料搬运系统更加集成和智能化以满足智能工厂的生产需求是人们急需解决的技术问题。
技术实现要素:
5.针对相关技术中的上述技术问题,本实用新型提出一种自动化电磁搬运系统,能够克服现有技术的上述不足。
6.为实现上述技术目的,本实用新型的技术方案是这样实现的:
7.一种自动化电磁搬运系统,包括桥式起重机、电磁吊具和控制系统,所述桥式起重机通过钢丝绳和剪叉式防摆机构与所述电磁吊具连接,所述剪叉式防摆机构上设有重锤撞杆,所述控制系统包括起重机控制器、电磁吊具控制器以及系统总控,所述系统总控通过起重机控制器与所述桥式起重机双向通信连接,所述电磁吊具通过电磁吊具控制器与系统总控双向通信连接;
8.所述桥式起重机包括格雷母线定位系统;所述电磁吊具包括吊梁,所述吊梁的上部中央设有若干电缆框,所述吊梁在所述电缆框的两侧设有对称的滑轮组,所述吊梁底部均匀地设有若干横梁,每个所述横梁均通过相对应的缓冲装置与底部相对应的电磁铁连接,所述电磁铁的顶部设有传感器。
9.进一步地,所述钢丝绳的一端与所述桥式起重机的钢丝卷筒固定连接,所述钢丝绳的另一端穿过所述电磁吊具的所述滑轮组后与所述桥式起重机固定连接。
10.进一步地,所述滑轮组为四组。
11.进一步地,所述缓冲装置包括弹簧、螺母、开口销和吊杆。
12.进一步地,所述传感器包括到位检测传感器、碰撞检测传感器、称重检测传感器。
13.本实用新型的有益效果:本实用新型通过重机控制器、电磁吊具控制器以及系统总控三者间的控制逻辑实现物料的自动搬运。电磁吊具和其控制器实现了电磁铁的智能分
组控制、磁力自动调节及吊具的到位、防碰撞、称重等各种功能并将其状态信号传输到系统总控;系统总控自身对仓储系统的物料信息包括物料位置、大小、重量等数据进行预处理后,下发指令到起重机及电磁吊具,实现起重机的车辆运行及停止、起升机构运行及到位反馈功能和电磁吊具的吸取、调磁及释放、电磁铁工作单元数量的控制,使得物料的搬运可实现自动化运行。本实用新型的自动化电磁搬运系统能够满足无人工厂的自动化搬运,尤其是切割线钢板上下料自动化作业及自动分拣作业的要求,而且适用性强、搬运效率高。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
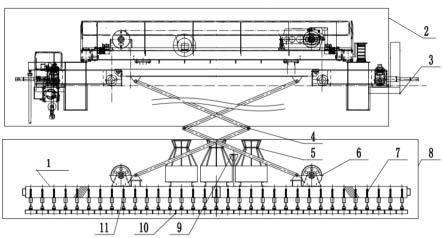
15.图1是根据本实用新型实施例所述的自动化电磁搬运系统的结构示意图;
16.图2是根据本实用新型实施例所述的自动化电磁搬运系统的电磁吊具的结构示意图;
17.图3是根据本实用新型实施例所述的自动化电磁搬运系统的控制原理示意图;
18.图4是根据本实用新型实施例所述的自动化电磁搬运系统的剪叉式防摆机构俯视图;
19.图5是根据本实用新型实施例所述的自动化电磁搬运系统的单个电磁铁单元及其缓冲装置的示意图。
20.图中:1、吊梁,2、桥式起重机,3、格雷母线定位系统,4、剪叉式防摆机构,5、电缆框,6、滑轮组,7、缓冲装置,8、电磁吊具,9、重锤撞杆,10、电磁铁,11、横梁,12、螺母,13、开口销,14、吊杆。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
22.如图1-5所示,根据本实用新型实施例所述的一种自动化电磁搬运系统,包括桥式起重机2、电磁吊具8和控制系统,所述桥式起重机2通过钢丝绳和剪叉式防摆机构4与所述电磁吊具8连接,所述剪叉式防摆机构4上设有重锤撞杆9,所述控制系统包括起重机控制器、电磁吊具控制器以及系统总控,所述系统总控通过起重机控制器与所述桥式起重机2双向通信连接,所述电磁吊具8通过电磁吊具控制器与系统总控双向通信连接;
23.所述桥式起重机2包括格雷母线定位系统3;所述电磁吊具8包括吊梁1,所述吊梁1的上部中央设有若干电缆框5,所述吊梁1在所述电缆框5的两侧设有对称的滑轮组6,所述吊梁1底部均匀地设有若干横梁11,每个所述横梁11均通过相对应的缓冲装置7与底部相对应的电磁铁10连接,所述电磁铁10的顶部设有传感器。
24.实施例中,根据本实用新型实施例所述的自动化电磁搬运系统,包括桥式起重机、
安装在桥式起重机下方的电磁吊具、控制系统组成,所述控制系统由起重机控制器、电磁吊具控制器以及系统总控三部分组成,通过三者间的控制逻辑实现物料的自动搬运。
25.所述桥式起重机包含有格雷母线定位系统,实现纵横坐标的精确定位。
26.所述电磁吊具包含有横梁、若干个电磁铁、4组动滑轮、若干不同功能的传感器组成,具有到位检测及碰撞检测、称重检测等功能,通过相应的检测功能实现系统的闭环控制。
27.所述电磁铁与横梁之间设置有缓冲机构,包含弹簧、螺母12、开口销13和吊杆14,能够减小起吊过程中的冲击力,减小漏吊的机率,同时补偿钢板挠性对吸力的不利影响。
28.所述桥式起重机与所述电磁吊具采用钢丝绳连接,钢丝绳的一端固定在起重机的钢丝卷筒上,另一端穿过电磁吊具的滑轮后固定在起重机上。
29.所述桥式起重机与所述电磁吊具采用剪叉式防摆机构连接,使得吊具在快速运行过程中纵横方向具有刚性,定位更加精准。
30.为了方便理解本实用新型的上述技术方案,以下通过具体使用方式上对本实用新型的上述技术方案进行详细说明。
31.在具体使用时,根据本实用新型所述的一种自动化电磁搬运系统,所述电磁吊具通过其控制器可实现电磁铁的智能分组控制、磁力自动调节及吊具的到位、防碰撞、称重等各种功能并将其状态信号可传输到系统总控,系统总控自身对仓储系统的物料信息(物料位置、大小、重量等)数据进行预处理后下发指令到起重机(大车运行及停止、小车运行及停止、起升机构运行及到位反馈)及电磁吊具(吸取、调磁、释放、电磁铁工作单元数量的控制),使得物料的搬运可实现自动化运行。
32.综上所述,借助于本实用新型的上述技术方案,本实用新型通过电磁吊具和其控制器实现了电磁铁的智能分组控制、磁力自动调节及吊具的到位、防碰撞、称重等各种功能并将其状态信号传输到系统总控;系统总控自身对仓储系统的物料信息包括物料位置、大小、重量等数据进行预处理后,下发指令到起重机及电磁吊具,实现起重机的车辆运行及停止、起升机构运行及到位反馈功能和电磁吊具的吸取、调磁及释放、电磁铁工作单元数量的控制,使得物料的搬运可实现自动化运行。本实用新型的自动化电磁搬运系统能够满足无人工厂的自动化搬运,尤其是切割线钢板上下料自动化作业及自动分拣作业的要求,而且适用性强、搬运效率高。
33.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1