一种工件自动投入滑槽装置的制作方法
1.本实用新型涉及底板拼接自动化领域,具体是一种工件自动投入滑槽装置。
背景技术:
2.在底板拼接自动工程里,工件很大很重,焊接工位过大不利于作业者放件操作,往往由机械手间接投料。有一种投料方式是作业者直接投放在机械人手的夹具上,这种方式投料节拍长,不利于节拍提升。还有一种是作业者放置在置台上,机械手抓件,这种只适合平板类小件。上述的机械人投料方式有不足之处:作业者作业与机械手作业不能共存,影响节拍提升。为了进一步提升节拍,开发一种工件自动投入滑槽的装置,能够输送复杂大型工件,同时作业者放件作业、机械人取件作业可以独立工作。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种工件自动投入滑槽装置,可以有效解决上述背景技术中提出的问题。
4.为解决上述问题,本实用新型所采取的技术方案是:一种工件自动投入滑槽装置,包括第一升降机、输送机、第二升降机和托盘机构,其特征在于,所述输送机位于第一升降机与第二升降机之间,且输送机一端与第一升降机连接,另一端与第二升降机连接;所述输送机为双层结构,其中输送机的下层设有第一阻挡机构和第二阻挡机构,上层设有第三阻挡机构和第四阻挡机构;所述第二阻挡机构位于靠近第一升降机的一端;所述第四阻挡机构位于靠近第二升降机的一端;所述托盘机构与输送机滑动连接,且托盘机构通过第一升降机和第二升降机实现在输送机上层与下层之间的切换。
5.作为本实用新型的进一步优选方案,所述第一升降机包括第一底盘、第一驱动组件、第一导向机构和第一传送机;所述第一底盘与输送机的一端螺栓连接;所述第一驱动组件安装在第一底盘上;第一传送机设于第一驱动组件上;所述第一导向机构设于第一驱动组件上,且第一导向机构位于第一传送机的两侧。
6.作为本实用新型的进一步优选方案,所述第一驱动组件包括第一导轨、第一电机、第一控制模块和第一托台;所述第一导轨设有两件,分别垂直安装在第一底盘的两端,其中位于一端的第一导轨与第一电机传动连接,另一端的第一导轨与第一控制模块螺丝连接;所述第一托台通过滑块与第一导轨滑动连接。
7.作为本实用新型的进一步优选方案,所述第一控制模块分为第一上升控制器和第一下降控制器,其中第一上升控制器设于第一导轨的上端,第一下降控制器位于第一上升控制器的下方。
8.作为本实用新型的进一步优选方案,所述输送机包括输送框架、倍速链输送机、第一感应器和第二感应器;所述输送框架为双层结构;所述倍速链输送机设有两台,分别安装在输送框架的上下两层;所述第一感应器设于输送框架的上层,且靠近第二升降机;所述第二感应器设于输送框架的下层,且靠近第一升降机。
9.作为本实用新型的进一步优选方案,所述第二升降机包括第二底盘、第二驱动组件、第二导向机构和第二传送机;所述第二底盘与输送机的一端螺栓连接;所述第二驱动组件安装在第二底盘上;第二传送机设于第二驱动组件上;所述第二导向机构设于第二驱动组件上,且第二导向机构位于第二传送机的两侧。
10.作为本实用新型的进一步优选方案,所述第二驱动组件包括第二导轨、第二电机、第二控制模块和第二托台;所述第二导轨设有两件,分别垂直安装在第二底盘的两端,其中位于一端的第二导轨与第二电机传动连接,另一端的第二导轨与第二控制模块螺丝连接;所述第二托台通过滑块与第二导轨滑动连接。
11.作为本实用新型的进一步优选方案,所述第二控制模块分为第二上升控制器和第二下降控制器,其中第二上升控制器设于第二导轨的上端,第二下降控制器位于第一感应器的下方。
12.作为本实用新型的进一步优选方案,所述托盘机构包括托盘框架、基准组件、前端夹紧板、第一滚轮接触板和第二滚轮接触板;所述托盘框架与基准组件滑动连接;所述基准组件设有两组,对称设置在托盘框架上;所述前端夹紧板安装在托盘框架上,位于两组基准组件之间;所述第一滚轮接触板与托盘框架螺栓连接,且第一滚轮位于托盘框架的底部;所述第二滚轮接触板与托盘框架螺栓连接,且第二滚轮接触板位于托盘框架的两侧。
13.与现有技术相比,本实用新型提供了一种工件自动投入滑槽装置,具备以下有益效果:
14.该装置能够实现作业者放件作业与机械人取件作业互不干扰,节拍进一步提升,提升效率,实现复杂大型工件长距离输送。
附图说明
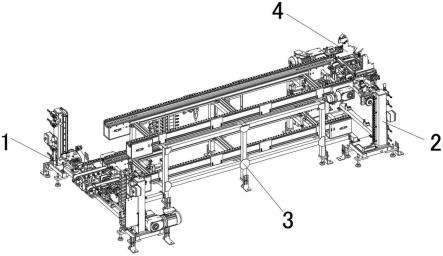
15.图1为本实用新型结构主体示意图;
16.图2为第一升降机部分结构示意图;
17.图3为第一驱动组件结构示意图;
18.图4为第二升降机部分结构示意图;
19.图5为第二驱动组件结构示意图;
20.图6为输送机主体示意图;
21.图7为托盘机构主体示意图;
22.图8为工作流程示意图;
23.图9为第一升降机构局部结构示意图;
24.图10为阻挡机构安装位置图;
25.其中:1、第一升降机,1-1、第一底盘,1-2、第一驱动组件,1-21、第一导轨,1-22、第一电机,1-23、第一控制模块,1-231、第一上升控制器,1-232、第一下降控制器,1-24、第一托台,1-3、第一导向机构,1-4、第一传送机,1-5、第三感应器,1-6、第四感应器,2、第二升降机,2-1、第二底盘,2-2、第二驱动组件,2-21、第二导轨,2-22、第二电机,2-23、第二控制模块,2-231、第二上升控制器,2-232、第二下降控制器,2-24、第二托台,2-3、第二导向机构,2-4、第二传送机,2-5、第五感应器,2-6、第六感应器,3、输送机,3-1、输送框架,3-2、倍速链输送机,3-3、第一感应器,3-4、第二感应器,3-5、中继盒,3-6、三联件,3-7、电磁阀组,3-8、
残压阀组,4、托盘机构,4-1、托盘框架,4-2、基准组件,4-3、前端夹紧板,4-4、第一滚轮接触板,4-5、第二滚轮接触板,5、第一阻挡机构,6、第二阻挡机构,7、第三阻挡机构,8、第四阻挡机构,9、连杆,9-1、齿轮,10、链条。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.参照图1-10,本实用新型提供一种工件自动投入滑槽装置,包括第一升降机1、输送机3、第二升降机2和托盘机构4,其中托盘机构4的数量根据实际生产的需要进行变化,其特征在于,所述输送机3位于第一升降机1与第二升降机2之间,且输送机3一端与第一升降机1连接,另一端与第二升降机2连接;所述输送机3为双层结构,其中输送机3的下层设有第一阻挡机构5和第二阻挡机构6,上层设有第三阻挡机构7和第四阻挡机构8;所述第二阻挡机构6位于靠近第一升降机1的一端;所述第四阻挡机构8位于靠近第二升降机2的一端;所述托盘机构4与输送机3滑动连接,且托盘机构4通过第一升降机1和第二升降机2实现在输送机3上层与下层之间的切换。
28.作为本实用新型的进一步优选方案,所述第一升降机1包括第一底盘1-1、第一驱动组件1-2、第一导向机构1-3和第一传送机1-4;所述第一底盘1-1与输送机3的一端螺栓连接;所述第一驱动组件1-2安装在第一底盘1-1上;第一传送机1-4设于第一驱动组件1-2上;所述第一导向机构1-3设于第一驱动组件1-2上,且第一导向机构1-3位于第一传送机1-4的两侧;所述第一升降机1还设有第三感应器1-5和第四感应器1-6;其中第三感应器1-5用于感应工件是否在席;所述第四感应器1-6用于感应托盘机构4是否在席,当第一升降机1在对接托盘机构4时,第一升降机1的第一导向机构1-3与托盘机构4两侧的第二滚轮接触板4-5滑动连接,第一升降机1的第一传送机1-4与托盘机构4下方的第一滚轮接触板4-4滑动连接,连接后第一驱动组件1-2设有的夹紧结构使托盘机构4夹紧定位。
29.作为本实用新型的进一步优选方案,所述第一驱动组件1-2包括第一导轨1-21、第一电机1-22、第一控制模块1-23和第一托台1-24;所述第一导轨1-21设有两件,分别垂直安装在第一底盘1-1的两端,其中位于一端的第一导轨1-21与第一电机1-22传动连接,另一端的第一导轨1-21与第一控制模块1-23螺丝连接;所述第一托台1-24通过滑块与第一导轨1-21滑动连接;所述第一驱动组件1-2还设有连杆9和链条10,其中连杆9两端设有齿轮9-1,齿轮9-1与链条10齿合连接,第一电机1-22也套有齿轮,并且与连杆9其中一端的齿轮9-1齿合连接,从而实现第一托台1-24的上升与下降。
30.作为本实用新型的进一步优选方案,所述第一控制模块1-23分为第一上升控制器1-231和第一下降控制器1-232,其中第一上升控制器1-231设于第一导轨1-21的上端,第一下降控制器1-232位于第一上升控制器1-231的下方;所述第一上升控制器1-231用于发送电信号,使第一托台1-24执行上升指令;所述第二下降控制器1-232用于发送电信号,使第一托台1-24执行下降指令。
31.作为本实用新型的进一步优选方案,所述输送机3包括输送框架3-1、倍速链输送机3-2、第一感应器3-3和第二感应器3-4;所述输送框架3-1为双层结构;所述倍速链输送机
3-2设有两台,分别安装在输送框架3-1的上下两层;所述第一感应器3-3设于输送框架3-1的上层,且靠近第二升降机2;所述第二感应器3-4设于输送框架3-1的下层,且靠近第一升降机1;所述第一感应器3-3和第二感应器3-4用于感应托盘机构4是否在席;所述输送机3设有中继盒3-5、三联件3-6、电磁阀组3-7和残压阀组3-8,中继盒3-5用于集成感应器线缆;主气管连接三联件3-6,然后连接到电磁阀组3-7、残压阀组3-8和阻挡机构,构成气路。
32.作为本实用新型的进一步优选方案,所述第二升降机2包括第二底盘2-1、第二驱动组件2-2、第二导向机构2-3和第二传送机2-4;所述第二底盘2-1与输送机3的一端螺栓连接;所述第二驱动组件2-2安装在第二底盘2-1上;第二传送机2-4设于第二驱动组件2-2上;所述第二导向机构2-3设于第二驱动组件2-2上,且第二导向机构2-3位于第二传送机2-4的两侧;所述第二升降机2与第一升降机1结构原理相同,区别在于第二升降机2的体型比第一升降机1要小。
33.作为本实用新型的进一步优选方案,所述第二驱动组件2-2包括第二导轨2-21、第二电机2-22、第二控制模块2-23和第二托台2-24;所述第二导轨2-21设有两件,分别垂直安装在第二底盘2-1的两端,其中位于一端的第二导轨2-21与第二电机2-22传动连接,另一端的第二导轨2-21与第二控制模块2-23螺丝连接;所述第二托台2-24通过滑块与第二导轨2-21滑动连接。
34.作为本实用新型的进一步优选方案,所述第二控制模块2-23分为第二上升控制器2-231和第二下降控制器2-232,其中第二上升控制器2-231设于第二导轨2-21的上端,第二下降控制器2-232位于第一感应器3-3的下方。
35.作为本实用新型的进一步优选方案,所述托盘机构4包括托盘框架4-1、基准组件4-2、前端夹紧板4-3、第一滚轮接触板4-4和第二滚轮接触板4-5;所述托盘框架4-1与基准组件4-2滑动连接;所述基准组件4-2设有两组,对称设置在托盘框架4-1上;所述前端夹紧板4-3安装在托盘框架4-1上,位于两组基准组件4-2之间;所述第一滚轮接触板4-4与托盘框架4-1螺栓连接,且第一滚轮位于托盘框架4-1的底部;所述第二滚轮接触板4-5与托盘框架4-1螺栓连接,且第二滚轮接触板4-5位于托盘框架4-1的两侧。
36.作为本实用新型的一个具体实施例: 使用者为作业者和机器人,其中作业者在第一升降机1的位置进行作业,机器人在第二升降机2的位置进行作业,托盘机构给4工作循环如图8所示,从位置
ⅰ‑ⅵ‑ⅴ‑ⅳ‑ⅲ‑ⅱ‑ⅰ
这样循环。详细动作如下:在ⅰ位置,作业者将工件放到托盘机构4上,然后作业者按下作业完成按钮,第一升降机1上的第一传送机1-4驱动使托盘机构4被推动到输送机3的上层;输送机3的上层倍速链输送机3-2接力输送到第二升降机2处;第二升降机2上的第二传送机2-4对接托盘机构4,推动到
ⅴ
位置,机械人从托盘机构4上抓件;机械人抓完工件后,第二升降机2将托盘机构4从
ⅴ
位置移动到ⅳ位置;通过第二升降机2上第二传送机2-4驱动托盘机构4推动到输送机3的下层;输送机3的下层倍速链输送机3-2接力输送到第一升降机1;第一升降机1上的第一传送机驱动将托盘输送到ⅱ位置,然后升降机将托盘从ⅱ位置回到ⅰ位置。
37.第一升降机1、输送机3、第二升降机2是可以分别独立工作,但是托盘机构4的流动会干扰第一升降机1、第二升降机2和输送机3设备的动作。而建立一套托盘流动机制来保证作业者放工件作业、机械人取工件作业独立工作。如图10所示,输送机3上下层分别设置了两个阻挡机构。当操作者作业时,第二阻挡机构6撤掉阻挡,让托盘机构4流动到ⅱ位置,而
第一阻挡机构5则阻挡来自第二升降机2传送的托盘机构4;当第一升降机1将托盘机构4输送到ⅰ位置,作业许可灯亮,作业者才可作业;作业者作业完成后,按下作业完成按钮,第二阻挡机构6建立阻挡,第一阻挡机构5撤掉阻挡,让托盘机构4流动到第二阻挡机构6的位置,完成一个循环。
38.当机械手作业时,第四阻挡机构8撤掉阻挡,让托盘机构4流动到
ⅴ
位置,而第三阻挡机构7则阻挡来自第一升降台1传送的托盘机构4;当托盘机构4流动到
ⅴ
位置,发出信号指示机械手抓件;机械手抓件完成后,机械手发出信号,第四阻挡机构8建立阻挡,第三阻挡机构7撤掉阻挡,让托盘机构4流动到第四阻挡机构8的位置,完成一个循环。这样保证托盘不会干扰,作业者放件作业、机械人取件作业能够独立工作。
39.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1