一种匣钵的自动化装料系统的制作方法
1.本实用新型涉及工业自动化技术领域,尤其涉及一种匣钵的自动化装料系统。
背景技术:
2.常规空口式坩埚在进行装料期间受限于移动坐标轨迹装置的精度控制,能实现匣钵的短距离搬运,但是针对横向输送机构与纵向输送机构之间切换式的搬运需要结构较为复杂的装置。
3.且现有的坩埚多为4宫格、6宫格、9宫格的坩埚,多宫格坩埚的装料较为麻烦。多宫格坩埚是在空格内加了隔舱,该隔舱的作用是为了让物料的比热传导系数增强,可以促使物料快速烧透,同时也可以帮助物料进行急速降温。
技术实现要素:
4.针对现有技术中存在的问题,本实用新型的目的在于提供一种降低工人劳动量、实现装料自动化的匣钵的自动化装料系统。
5.为达到以上目的,本实用新型采用如下技术方案。
6.一种匣钵的自动化装料系统,其特征在于,包括:支撑框架,一个或多个下料装置以及用于夹持和移动匣钵的机器人;所述下料装置固设在所述支撑框架的上端,在所述支撑框架上设有容所述匣钵进入且与所述下料装置对应的空腔,所述机器人包括:机器人底座,转动地设在所述机器人底座上的第一机械臂,以及与所述第一机械臂转动连接的第二机械臂,在所述第二机械臂上设有用于夹持所述匣钵的气爪夹具。
7.作为上述方案的进一步说明,所述下料装置包括:下料斗,与所述下料斗的底部连通的下料管;在所述下料管的底部设有下料口,在所述下料口上设有下料开关阀门。
8.作为上述方案的进一步说明,在所述下料管的外周设有脱气杯,所述脱气杯通过脱气管连接有脱气泵,所述脱气杯与所述下料管通过过滤层连通,所述脱气杯通过脱气管连接有脱气泵。
9.作为上述方案的进一步说明,在所述下料斗和/或所述气爪夹具上设有称重计量传感器。
10.作为上述方案的进一步说明,所述支撑框架为柜体,所述下料装置设在所述柜体上端,在所述柜体上设有容所述匣钵进入所述空腔的开口。
11.作为上述方案的进一步说明,在所述柜体的下部设有与所述空腔连通的粉尘收集箱。
12.作为上述方案的进一步说明,在所述柜体的顶部设有与所述下料装置对应的进料口,所述进料口连接有气流送料设备。
13.作为上述方案的进一步说明,在所述柜体的顶部设有多个排气口,所述排气口设在所述柜体顶部的端角上。
14.作为上述方案的进一步说明,还包括控制系统,在所述柜体的外侧面上设有与所
述控制系统连接的控制面板。
15.本实用新型的有益效果是。
16.一、机器人按设定的xyz坐标轨迹的路线行走将匣钵运输到下料装置下方待匣钵装料完毕后,机器人可直接将匣钵放去其他工位,替代了传统的叠钵、升降、转弯、倒料、清扫等工位,结构简单,降低工人劳动量,提高工作效率。
17.二、设置称重计量传感器精准控制匣钵的装载量。
18.三、在柜体的底部设置与空腔连接的粉尘收集仓,回收物料,避免物料浪费以及减少物料扩散出柜体而污染环境。
附图说明
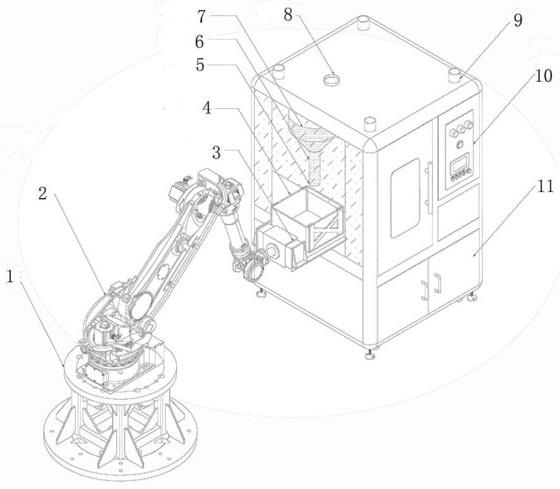
19.图1所示为本实用新型提供的匣钵的自动化装料系统结构图。
20.附图标记说明。
21.1:机器人底座,2:机器臂,3:气爪夹具,4:匣钵,5:下料口,6:脱气杯,7:下料斗,8:进料口,9:排气口,10:控制面板,11:粉尘收集仓。
具体实施方式
22.在本实用新型的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向
”ꢀ
、“纵向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本实用新型的具体保护范围。
23.此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本实用新型描述中,“至少”的含义是一个或一个以上,除非另有明确具体的限定。
24.在本实用新型中,除另有明确规定和限定,如有术语“组装”、“相连”、“连接”术语应作广义去理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;也可以是机械连接;可以是直接相连,也可以是通过中间媒介相连,可以是两个元件内部相连通。对于本领域普通技术人员而言,可以根据具体情况理解上述的术语在本实用新型中的具体含义。
25.在实用新型中,除非另有规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一特征和第二特征不是直接接触而是通过它们之间的另外特征接触。而且,第一特征在第二特征“之上”、“之下”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅是表示第一特征水平高度高于第二特征的高度。第一特征在第二特征
ꢀ“
之上”、“之下”和“下面”包括第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度低于第二特征。
26.下面结合说明书的附图,对本实用新型的具体实施方式作进一步的描述,使本实用新型的技术方案及其有益效果更加清楚、明确。下面通过参考附图描述实施例是示例性
的,旨在解释本实用新型,而不能理解为对本实用新型的限制。
27.如图1所示,一种匣钵的自动化装料系统,包括:支撑框架,下料装置以及用于夹持和移动匣钵4的机器人;所述下料装置固设在所述支撑框架的上端,在所述支撑框架上设有容所述匣钵进入且与所述下料装置对应的空腔,所述机器人包括:机器人底座1,转动地设在所述机器人底座上的机器臂2,在所述机器臂2上设有用于夹持所述匣钵的气爪夹具3。
28.需要说明的是,所述支撑框架为柜体,在所述柜体内设有容所述匣钵4进入的空腔,在所述空腔的一侧设有开口。在所述支撑框架的顶部设有与所述下料装置连通的进料口8。所述下料装置包括:下料斗7,与所述下料斗7连通的下料管,在所述下料管的底部设有下料口5,在所述下料口上设有用于开启或关闭所述下料口5的出料阀门。
29.所述下料管和所述下料斗可拆卸连接。具体的,所述下料管和所述下料斗通过螺纹连接或卡扣连接。在本实施例中,设置一个下料装置,在机器人夹持的匣钵为多宫格匣钵时,在往匣钵中的一个宫格中下料后机器人调节匣钵的位置使得下料口对准另一宫格进行下料。当然,在其它实施方式中,可在所述支撑框架上设置多个下料装置同时对匣钵的宫格下料,不限于本实施例。
30.所述机器臂包括:转动地设在所述机器人底座1上的第一机械臂,以及与所述第一机械臂转动连接的第二机械臂;所述气爪夹具设在所述第二机械臂上。至于机器人的具体结构为本领域技术人员按照实际需要采购的,为本领域的公知常识,在这里不在赘述。
31.进一步的,在所述下料管的外周面上设有脱气杯6。所述脱气杯和所述下料管之间通过过滤层连通,所述脱气杯通过脱气管连接有脱气泵。在所述脱气杯上设有压缩气接头,所述压缩气接头通过管道连接有压缩气源。压缩气通过所述压缩气接口进入脱气杯内,吹落贴附在过滤层内侧的物料,防止过滤层阻塞。在本实施例中,物料是通过气流(空气或氮气)来进行输送至下料斗的;进入下料斗内的物料在喂料期间呈向下坠落状态,物料中的空气需要定量进行排出,脱气杯用于排出物料中的气体,使得进入匣钵内的物料较为密实,减少物料飞扬导致的损耗,至于气流输送物料设备的具体结构是本领域技术人员根据实际需要购买的,在这里不再赘述。
32.在所述下料斗和/或所述气爪夹具上设有称重计量传感器。设置称重计量传感器用于更加精准地控制匣钵装载量。在本实施例中,所述下料斗的外沿搭设在称重计量传感器的顶端,通过称重计量传感器不断反馈重量值到控制系统,直到出料重量达到设定值时控制系统控制关闭出料阀门。在称量计重传感器反馈的重量达到最低限定值时,控制系统发出提醒信号提醒工作人员加料。或在进料口上连接有进料装置,控制系统控制进料装置进料。显然,其它实施方式中,所述下料管可以通过螺旋喂料装置给料,给料量是根据螺杆的转速进行计量,在螺杆上装有电子传感器,螺旋喂料装置通过称重桥架确定经过物料的重量,采用测速传感器测量给料机的运行速度,然后将速度信号和重量信号一起反馈给控制系统,通过分析该流量与设定流量关系,可以调节变频器的驱动速度,使给料机上的物料流量发生变化,从而实现定量给料。
33.在所述柜体的顶端设有排气口9。在本实施例中,所述排气口9的个数为四个,分设在所述柜体顶部的四个端角处。本排气口的作用是为了排出散落在空腔内的粉尘,使用经验验证,排气口设计为4个效果较好。
34.在所述柜体的底部设有与所述空腔连通的粉尘收集仓11,在所述粉尘收集箱11的
侧部设有箱门,在所述粉尘收集仓内可拆卸地安装有具有向上开口的收集柜。
35.另外需要说明的是,还包括控制系统,在所述柜体的外侧面上设有与所述控制系统连接的控制面板10。所述控制面板用于调节参数和控制用电装置的工作。至于控制系统和控制面板的具体结构和工作原理,为本领域技术人员根据实际需要采购的,这是本领域技术人员所掌握的普通技术知识,不再展开详细说明。
36.通过上述的结构和原理的描述,所属技术领域的技术人员应当理解,本实用新型不局限于上述的具体实施方式,在本实用新型基础上采用本领域公知技术的改进和替代均落在本实用新型的保护范围,本实用新型的保护范围应由各权利要求项及其等同物限定之。具体实施方式中未阐述的部分均为现有技术或公知常识。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1