一种用于保护机器人的运输结构的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种用于保护机器人的运输结构。
背景技术:
2.目前,一般是采用将机器人直接放置在运输车上,机器人的轮组与运输车接触,然后采用定位结构对机器人进行定位,但是采用这种方式,在运输机器人的过程中,机器人的轮组容易被压坏,同时,定位结构的结构简陋,定位效果差,从而导致机器人容易发生晃动。
技术实现要素:
3.本实用新型的目的是克服了现有技术的问题,提供了一种可以保护机器人的轮组且可避免机器人在运输的过程中发生晃动的用于保护机器人的运输结构。
4.为了达到上述目的,本实用新型采用以下方案:
5.一种用于保护机器人的运输结构,包括底盘托架和上装固定架;所述上装固定架设于所述底盘托架上;所述底盘托架包括:
6.底框,所述上装固定架设于所述底框上;
7.底托架,其两端连接所述底框的两端,用于承托机器的本体;
8.轮托架,所述底托架的两侧分别连接有一个与所述底框连接且用于定位机器人两侧的轮组。
9.进一步地,所述上装固定架包括支撑竖杆和限位顶架;4根所述支撑竖杆均匀分布所述底框上;所述限位顶架分别与4根所述支撑竖杆的上端连接。
10.进一步地,所述限位顶架包括顶方框、顶横杆和顶纵杆;所述顶方框的四个角的位置分别与4根所述支撑竖杆的上端连接;所述顶横杆位于所述顶方框内且横设于所述顶方框的两端的中间位置上;两根所述顶纵杆间隔纵设于所述顶方框与顶横杆之间。
11.进一步地,相邻的两根所述支撑竖杆之间均横设有位于所述底托架上方的限位横杆。
12.进一步地,所述限位横杆与所述底框之间的距离为0.8-1m。
13.进一步地,所述底托架包括底支杆、托撑方框和后限位架;所述托撑方框的两端与所述底框的两端相对应;所述托撑方框的四个角的位置均通过一根所述底支杆与所述底框连接;所述后限位架设于所述托撑方框的后端上。
14.进一步地,所述后限位架呈n形结构。
15.进一步地,所述底支杆长度为20-30cm。
16.进一步地,所述轮托架包括第一横杆、第二横杆和轮支杆;两根所述第一横杆的一端连接在所述托撑方框的一侧;两根所述第一横杆间隔设置;所述第二横杆连接在两根所述第一横杆的另一端之间;所述第一横杆的另一端与所述底框之间通过一根所述轮支杆连接;所述托撑方框、两根第一横杆和一根第二横杆围成用于定位机器人两侧的轮组的定轮空间。
17.进一步地,所述底盘托架和上装固定架均由3030铝型材制成。
18.与现有的技术相比,本实用新型具有如下优点:
19.本实用新型分为底盘托架和上装固定架两部分,具体以底框、底托架和轮托架作为底盘托架,利用底托架对机器人的底盘托起和支撑,使机器人的轮组悬空,防止运输过程中将机器人的轮组压坏,同时,轮托架对机器人的轮组限位,防止机器人整体发生周向上的转动,以及再利用上装固定架对机器人的上部分定位,从而避免机器人在运输的过程中发生晃动,运输稳定性好,对运输的机器人起到良好的保护作用。
附图说明
20.下面结合附图和具体实施方式对本技术作进一步详细的说明。
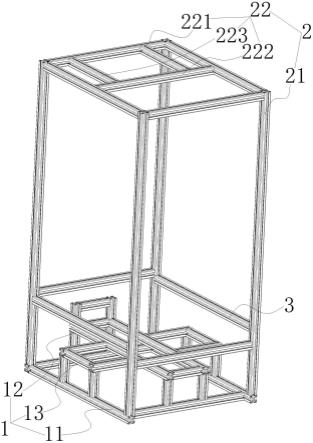
21.图1是本实用新型的用于保护机器人的运输结构的立体结构示意图。
22.图2是本实用新型的底盘托架的立体结构示意图。
23.图中包括:
24.底盘托架1、底框11、底托架12、底支杆121、托撑方框122、后限位架123、轮托架13、第一横杆131、第二横杆132、轮支杆133、上装固定架2、支撑竖杆21、限位顶架22、顶方框221、顶横杆222、顶纵杆 223、限位横杆3。
具体实施方式
25.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
26.如图1至图2所示,一种用于保护机器人的运输结构,包括底盘托架1和上装固定架2;所述上装固定架2设于所述底盘托架1上;所述底盘托架1包括底框11、底托架12和轮托架13。其中,所述上装固定架2设于所述底框11上;底托架12的两端连接所述底框11的两端,用于承托机器的本体;所述底托架12的两侧分别连接有一个与所述底框11连接且用于定位机器人两侧的轮组。
27.该用于保护机器人的运输结构分为底盘托架1和上装固定架2两部分,具体以底框11、底托架12和轮托架13作为底盘托架1,利用底托架12对机器人的底盘托起和支撑,使机器人的轮组悬空,防止运输过程中将机器人的轮组压坏,同时,轮托架13对机器人的轮组限位,防止机器人整体发生周向上的转动,以及再利用上装固定架2对机器人的上部分定位,从而避免机器人在运输的过程中发生晃动,运输稳定性好,对运输的机器人起到良好的保护作用。
28.具体的,所述上装固定架2包括支撑竖杆21和限位顶架22;4根所述支撑竖杆21均匀分布所述底框11上;所述限位顶架22分别与4 根所述支撑竖杆21的上端连接。4根支撑竖杆21对机器人在竖向方向起到良好的限位作用,防止机器人在运输的过程中倾倒,同时,限位顶架22有利于机器人的顶部定位,再与底盘托架1相结合,使机器人由上到下都起到良好的定位作用,防止机器人在运输过程中发生晃动。
29.其中,所述限位顶架22包括顶方框221、顶横杆222和顶纵杆223;所述顶方框221的四个角的位置分别与4根所述支撑竖杆21的上端连接;所述顶横杆222位于所述顶方框221内且横设于所述顶方框221 的两端的中间位置上;两根所述顶纵杆223间隔纵设于所述顶
方框221 与顶横杆222之间。一根顶横杆222和两根顶纵杆223设置在顶方框 221内,顶方框221、顶横杆222和顶纵杆223三者形成的限位空间,有利于对机器人的顶部限位,防止机器人在运输过程中发生晃动,对运输的机器人起到良好的保护作用。
30.为了加强对机器人的下端限位保护,防止机器人在运输的过程中倾倒,相邻的两根所述支撑竖杆21之间均横设有位于所述底托架12 上方的限位横杆3。
31.优选的,所述限位横杆3与所述底框11之间的距离为0.8-1m。通过合理设置限位横杆3与所述底框11之间的距离更好地防止机器人在运输的过程中倾倒。当限位横杆3与底框11之间的距离为1m时,防护效果达到最佳。
32.在本实施例中,所述底托架12包括底支杆121、托撑方框122和后限位架123;所述托撑方框122的两端与所述底框11的两端相对应;所述托撑方框122的四个角的位置均通过一根所述底支杆121与所述底框11连接;所述后限位架123设于所述托撑方框122的后端上。利用底支杆121支撑起托撑方框122,托撑方框122可以对机器人的底盘托起和支撑,使机器人的轮组悬空,防止运输过程中将机器人的轮组压坏,同时,后限位架123对机器人起到良好的阻挡作用,防止机器人向后倾倒滑动。优选的,所述后限位架123呈n形结构,结构简单,具有良好的限位作用。具体的,所述底支杆121长度为20-30cm。
33.具体的,所述轮托架13包括第一横杆131、第二横杆132和轮支杆133;两根所述第一横杆131的一端连接在所述托撑方框122的一侧;两根所述第一横杆131间隔设置;所述第二横杆132连接在两根所述第一横杆131的另一端之间;所述第一横杆131的另一端与所述底框 11之间通过一根所述轮支杆133连接。所述托撑方框122、两根第一横杆131和一根第二横杆132围成用于定位机器人两侧的轮组的定轮空间。利用轮支杆133与托撑方框122对第一横杆131和第二横杆132 实现连接和支撑,然后利用两根第一横杆131和一根第二横杆132形成空间,对机器人的轮组起到良好的限位作用。
34.优选的,所述底盘托架1和上装固定架2均由3030铝型材制成,具有良好耐久度,重量轻,成本低等特点。
35.综上,本实用新型实施例提供一种用于保护机器人的运输结构,其中,该用于保护机器人的运输结构分为底盘托架1和上装固定架2 两部分,具体以底框11、底托架12和轮托架13作为底盘托架1,利用底托架12对机器人的底盘托起和支撑,使机器人的轮组悬空,防止运输过程中将机器人的轮组压坏,同时,轮托架13对机器人的轮组限位,防止机器人整体发生周向上的转动,以及再利用上装固定架2对机器人的上部分定位,从而避免机器人在运输的过程中发生晃动,运输稳定性好,对运输的机器人起到良好的保护作用。
36.以上所述仅是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1