手持式电动升降机的制作方法
1.本实用新型大体上涉及将汽化器容器安装到机柜(例如,固体递送机柜)中及/或从机柜移除。更明确来说,本实用新型涉及用于使用具有止动件的手持式电动升降机将汽化器容器安装到固体递送机柜中及/或从固体递送机柜移除的设备及系统,所述止动件与固体递送机柜的通道相互作用,以与手持式电动升降机的轮接合及/或脱离。
背景技术:
2.在源试剂(例如用于例如化学气相沉积、原子层沉积及/或离子植入工艺的工艺中的蒸气的液体及/或固体源试剂)的使用中,源试剂经加热以形成用于沉积或植入的源试剂蒸气,汽化器容器可适于固持源试剂。在操作之前及/或之后,将汽化器容器安装到机柜(例如,固体递送机柜)中或从机柜移除,且需要根据行业标准满足安装及移除的安全要求。
技术实现要素:
3.本实用新型大体上涉及将汽化器容器安装到机柜(例如,固体递送机柜)中及/或从机柜移除。更明确来说,本实用新型涉及用于使用具有止动件的手持式电动升降机将汽化器容器安装到固体递送机柜中及/或从固体递送机柜移除的设备及系统,所述止动件与固体递送机柜的通道相互作用,以与手持式电动升降机的轮接合及/或脱离。
4.当在操作之前及/或之后,将汽化器容器安装到机柜(例如固体递送机柜)中及/或从机柜移除时,需要满足安装及移除的安全及其它要求(例如,半导体装备及材料国际(semi)标准,例如参见https://www.semi.org)。还需要考虑安装在客户现场处(通常在具有例如格栅地板等的狭窄区域中)的固体递送机柜的占地面积限制,以及提升重的固体递送汽化器容器所需的承重能力。本文所公开的实施例可提供一种具有止动件的手持式电动升降机,所述止动件与固体递送机柜的通道相互作用,以确保安全且辅助地将汽化器容器安装到固体递送机柜中及/或从固体递送机柜移除。
5.在实施例中,一种手持式电动升降机包含长形桅杆、经附接到所述桅杆的效应器(effector)、经配置以移动所述升降机的处置器,及至少一个脚轮。所述效应器由电源控制以沿所述桅杆移动。所述至少一个脚轮中的每一者包含止动件及轮。所述止动件是长形的并安置在所述轮上方。所述止动件经配置以与所述轮接合,以防止所述轮在所述止动件被向下推动时旋转。所述止动件经进一步配置以与所述轮脱离,以允许所述轮在所述止动件被释放时旋转。
6.在实施例中,所述轮是旋转轮。
7.在实施例中,所述至少一个脚轮包含两个前脚轮,所述升降机进一步包括两个后脚轮。
8.在实施例中,所述升降机的宽度为或约为21英寸。
9.在实施例中,所述升降机的承重能力范围为从为或约为120磅到为或约为200磅。
10.在实施例中,所述止动件包含长形销。
11.在实施例中,所述止动件包含弹性体。当所述止动件没有被推动时,所述弹性体经配置以释放所述止动件,使得所述止动件与所述轮脱离。
12.在实施例中,一种递送系统包含:手持式电动升降机,其经配置以提升至少一个汽化器容器;及机柜,其经配置以固持所述至少一个汽化器容器。所述升降机包含长形桅杆、经附接到所述桅杆的效应器、经配置以移动所述升降机的处置器,及至少一个脚轮。所述效应器由电源控制以沿所述桅杆移动。所述至少一个脚轮中的每一者包含止动件及轮。所述止动件是长形的并安置在所述轮上方。所述止动件经配置以与所述轮接合,以防止所述轮在所述止动件被向下推动时旋转。所述止动件经进一步配置以与所述轮脱离,以允许所述轮在所述止动件被释放时旋转。所述机柜包含至少一个通道,其经配置以容纳所述至少一个脚轮。
13.在实施例中,所述至少一个通道包含两个通道。所述两个通道中的每一者经配置以分别容纳所述两个前脚轮中的每一者。
14.在实施例中,所述至少一个通道安置在所述机柜的底部处。
15.在实施例中,所述至少一个通道经配置使得当所述至少一个脚轮容纳于所述至少一个通道中时,所述至少一个通道的顶壁向下推动所述止动件以防止所述轮旋转。
16.在实施例中,所述机柜经固定到格栅地板。
17.在实施例中,所述机柜经螺栓固定到所述格栅地板。
18.在实施例中,所述至少一个通道包含顶壁。当所述止动件与所述轮脱离时,所述顶壁的高度低于所述止动件的高度,使得当所述至少一个脚轮容纳于所述至少一个通道中时,所述顶壁向下推动所述止动件,且所述止动件与所述轮接合。
附图说明
19.参考形成本实用新型的一部分的附图,且附图说明其中可实践本说明书中所描述的系统及方法的实施例。
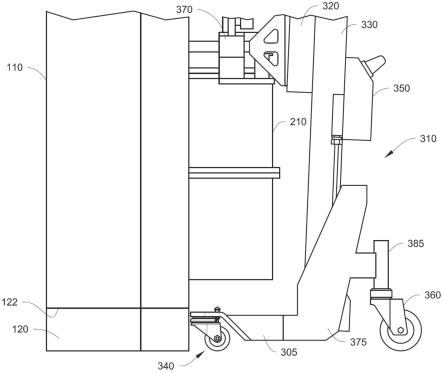
20.图1说明根据实施例的递送系统的手持式电动升降机的侧视图,所述手持式电动升降机提升汽化器容器以将汽化器容器安装到机柜中。
21.图2说明根据实施例的递送系统的手持式电动升降机的后侧视图,所述手持式电动升降机与机柜相互作用,且汽化器容器安装在机柜中。
22.图3说明根据实施例的手持式电动升降机的脚轮的分解视图。
23.图4a说明根据实施例的手持式电动升降机的脱离的脚轮的横截面侧视图。
24.图4b说明根据实施例的图4a的手持式电动升降机的脱离的脚轮在不同角度的横截面视图。
25.图4c说明根据实施例的图4a的手持式电动升降机的脱离的脚轮的前侧视图。
26.图4d说明根据实施例的递送系统中的图4a的手持式电动升降机的脱离的脚轮的侧视图。
27.图5说明根据实施例的手持式电动升降机的脚轮的横截面侧视图。
28.图6a说明根据实施例的手持式电动升降机的接合的脚轮的横截面视图。
29.图6b说明根据实施例的图6a的手持式电动升降机的接合的脚轮的前侧视图。
30.图6c说明根据实施例的递送系统中的图6a的手持式电动升降机的接合的脚轮的
后侧视图。
31.图6d说明根据实施例的递送系统中的图6a的手持式电动升降机的接合的脚轮的侧视图。
32.图7a说明根据实施例的手持式电动升降机的脱离的脚轮的侧视图。
33.图7b说明根据实施例的手持式电动升降机的接合的脚轮的侧视图。
34.图7c说明根据实施例的手持式电动升降机的脱离的脚轮的侧视图。
35.图7d说明根据实施例的手持式电动升降机的接合的脚轮的侧视图。
36.贯穿全文,相同的参考数字表示相同的部件。
具体实施方式
37.本实用新型大体上涉及将汽化器容器安装到机柜(例如,固体递送机柜)中及/或从机柜移除。更明确来说,本实用新型涉及用于使用具有止动件的手持式电动升降机将汽化器容器安装到固体递送机柜中及/或从固体递送机柜移除的设备及系统,所述止动件与固体递送机柜的通道相互作用,以与手持式电动升降机的轮接合及/或脱离。
38.以下定义适用于本实用新型。如本文所定义,术语“固体递送机柜”可指例如用于存储容器(例如,固体递送汽化器容器等)的机柜(例如,具有搁板的橱柜)。
39.如本文所定义,术语“固体递送汽化器”可指例如,其中提供固体反应剂(例如三氯化铝(例如,alcl3))或任何其它合适的化学品以在汽化器被加热时汽化的汽化器。
40.如本文所定义,术语“容器”或“汽化器容器”可指例如适于固持源试剂的容器。在实施例中,容器可具有机械加工到非常接近公差(例如,在1/1000到3/1000英寸范围内)的圆柱形形状。将了解,第8,821,640号美国专利中描述汽化器及/或容器的不同实施例,所述专利的全部内容在此以引用的方式并入本文中。在实施例中,“容器”还可指例如“安瓿”。将了解,第6,921,062号美国专利中描述汽化器及/或安瓿的不同实施例,所述专利的全部内容在此以引用的方式并入本文中。
41.如本文所定义,术语“高度”可指物体或点相对于地平面的高度。例如,在操作中,手持式电动升降机经安置在地表面上,其轮接触地表面,且止动件的高度可为垂直方向上从地表面到止动件的最高点的距离。
42.本文参考附图描述本实用新型的特定实施例;然而,应理解,所公开的实施例仅为本实用新型的实例,其可以各种形式体现。未详细描述众所周知的功能或构造,以避免在不必要的细节中模糊本实用新型。因此,本文所公开的具体结构及功能细节不应被解释为限制性的,而仅应被解释为权利要求的基础,及用于教示所属领域的技术人员在几乎任何适当的详细结构中以各种方式使用本实用新型的代表性基础。在本说明书中以及在附图中,相同的参考数字表示可执行相同、相似或等效功能的元件。
43.本实用新型的范围应由所附权利要求及其法律等效物而不是本文所给出的实例确定。此外,除非本文中明确描述为“关键”或“必不可少”,否则没有任何元件对本实用新型的实践是必不可少的。
44.将了解,在半导体制造应用中使用本文所公开的递送系统可具有特定的优点,且可解决特定的技术问题。例如,固体递送机柜下方的间隙区域(例如,通道的间隙区域)经定大小以使得如果轮在通道中旋转,那么手持式电动升降机将无法从固体递送机柜下方移除
或容纳于通道中。也就是说,由于通道经定大小以允许轮在轮移除时旋转或转动,因此需要在安装汽化器容器时锁定轮(防止其旋转),且需要保持锁定(防止其旋转),直到轮完全从机柜移除。如果需要操作者手动锁定轮,那么可能会错过锁定步骤,且升降机可能会卡在小间隙区域中。锁定需要自动且可靠地完成。
45.还将了解,固体递送机柜通常安装在狭窄区域中(例如,具有为或约为23英寸到为或约为26英寸的宽度的走廊)。在应用中,狭窄区域可为“u”形。因而,轮必须处于笔直位置(且不能沿任何其它方向转),以便轮在进出固体递送机柜的通道时向前及/或向后移动,以避免轮卡在固体递送机柜下方的通道中。此外,由于走廊的占地面积小,在将轮从固体递送机柜下方的通道中拉出之后,或在将轮推入通道之前,轮需要能够在任何方向上自由旋转及/或移动,以便操作者将手持式电动升降机侧向滑入及/或滑出走廊(狭小空间)。
46.本文所公开的实施例提供一种定向锁定机构(例如,与轮接合/脱离的止动件),其与固体递送机柜的通道(例如,具有预定高度)一起工作,以防止轮卡在狭窄的走廊中,尤其是当手持式电动升降机的轮滑到固体递送机柜下方时,止动件可防止轮四周旋转。也就是说,当被激活(例如,被按下并与轮接合)时,锁定机构经配置以防止轮旋转,且仅允许轮向前及/或向后移动。
47.将进一步了解,需要满足汽化器容器安装及移除的安全及其它要求(例如,semi标准)。因而,提升汽化器容器的升降机需要足够窄,以适应狭窄的走廊,能够从侧面滑入走廊,然后向前推,以将汽化器容器正确地放入机柜中,其承重能力能够安全地提升汽化器容器(例如,使用重型电动机,例如恒定转矩电动机),且足够轻(例如,升降机的重量等于或低于100磅),以由操作者推动/移动,而升降机动作需要电动(例如,非手动移动/提升)。将了解,恒定转矩电动机可被视为“重型”电动机,因为它们可能会在其“接通”循环中经历高转矩负载,这与通常驱动风扇及/或泵的可变转矩电动机不同,且一旦可变转矩电动机启动并运行,它们可能不需要太多功率。另外,生产地板(在其上安装机柜的地板)通常为格栅地板,其要求轮具有在特定范围内的直径(例如,轮的直径等于或大于2英寸)。旋转轮具有经定大小以在格栅地板上自由旋转及移动的直径。
48.本文所公开的实施例提供一种递送系统(例如,具有拥有完全旋转轮及止动件的手持式电动升降机),以满足半导体制造应用的安全性、重量及其它要求。
49.图1说明根据实施例的递送系统(110、210、310)的升降机310的侧视图,所述升降机提升容器210以将容器210安装到机柜110中。将了解,图1还可说明升降机310提升容器210以将容器210从机柜110移除。还将了解,在实施例中,递送系统可包含升降机310及机柜110,而不包含容器210。
50.图2说明根据实施例的递送系统(110、210、310)的升降机310的后侧视图,所述升降机与机柜110相互作用,且容器210安装在机柜110中。应了解,图2还可说明升降机310与机柜110相互作用以从机柜110移除容器210。
51.在实施例中,升降机310可为手持式电动升降机。在实施例中,手持式电动升降机可具有为或约为21英寸的宽度。手持式电动升降机310包含例如在垂直方向上延伸的长形桅杆330。手持式电动升降机310还包含附接到桅杆330的效应器320。效应器320可由手持式电动升降机310的电源350控制,以沿桅杆330移动。手持式电动升降机310进一步包含经配置以(例如,由操作者)移动手持式电动升降机310的处置器380。手持式电动升降机310还包
含脚轮340、360。在实施例中,手持式电动升降机310包含两个前脚轮340及两个后脚轮360。在实施例中,后脚轮360中的一或多者可具有制动器(例如,脚制动器等),以防止手持式电动升降机310向前及/或向后移动。
52.在实施例中,手持式电动升降机310进一步包含附接到效应器320的固持器370。固持器370经配置以固持例如容器210,使得当效应器320由例如操作者控制的电源350控制时,容器210可沿着桅杆330移动(例如,被提升及下降)。
53.在实施例中,容器210可为汽化器容器。汽化器容器可具有为或约为120磅的最小重量,及/或为或约为200磅的最大重量。
54.在实施例中,手持式电动升降机310还包含腿部305、主体部分375及/或适配器385。手持式电动升降机310可包含两个腿部305、两个主体部分375及两个适配器385。每一腿部305连接(例如,固定、附接等)到脚轮340及主体部分375。每一主体部分375连接(例如,固定、附接等)到适配器385。每一适配器385连接(例如,固定、附接等)到脚轮360。手持式电动升降机310的第一中间杆390经配置以连接两个主体部分375的上部。手持式电动升降机310的第二中间杆395经配置以连接两个主体部分375的下部。桅杆330连接(例如,固定、附接等)到第二中间杆395的中间部分。
55.在实施例中,在操作中,所有脚轮340、360安置在地表面上并接触地表面,且手持式电动升降机310的所有其它组件与地表面间隔开。
56.在实施例中,机柜110可为固体递送机柜。固体递送机柜110可包含在水平方向上布置(例如并排)的一或多个搁板。每一搁板可经配置以容纳汽化器容器210。固体递送机柜110包含安置在固体递送机柜110底部处的通道120。在实施例中,固体递送机柜110包含两个通道120。每一通道120具有拥有顶壁122的凹陷部,且可容纳脚轮340。固体递送机柜110可永久固定(例如,经螺栓固定或经由任何其它合适的附接机构)到生产地板(例如,格栅地板等)。
57.图3说明根据实施例的图1及2的手持式电动升降机310的脚轮340的分解视图。
58.将了解,本文所描述及陈述的实施例不限于所描述的数量、大小及/或形状等。也就是说,本文所描述及陈述的数量、大小及/或形状等仅提供用于描述目的,并不旨在限制。
59.如图3中所展示,脚轮340包含止动件341、轮347及连接器(或框架)346。在实施例中,轮347可为具有紧凑框架的低轮廓轮。在实施例中,脚轮340可包含并排布置的至少两个轮347。腿部305包含位于腿部305的端部中的第一开口305a及第二开口305b。连接器346包含凹陷部346a及突出部346b。在实施例中,凹陷部346a可为开口。突出部346b例如在垂直方向上延伸。突出部346b经配置使得突出部346b的直径略小于、略大于或相同于第二开口305b的直径。突出部346b可穿过第二开口305b,以使用例如任何合适的连接件(例如,压配合、过盈配合、紧固件、粘合剂等)将脚轮340连接(例如,固定、附接等)到腿部305。突出部346b的上表面可与腿部305的端部的上表面齐平(例如,参见下面的图4a)。
60.在实施例中,止动件341包含销(342、344)。销(342、344)可为长形。销(342、344)包含整体上部342及整体下部344。上部342包含头部342a、颈部342b及主体342c。下部344包含突出部344a、肩部344b及底部344c。止动件341还包含弹性体343。在实施例中,弹性体343可为弹簧或任何合适的弹性组件等。止动件341进一步包含外壳345。
61.图4a说明根据实施例的手持式电动升降机310的脱离的脚轮340的横截面侧视图。
图4b说明根据实施例的图4a的(手持式电动升降机310的)脱离的脚轮340在不同角度的横截面视图。图4c说明根据实施例的图4a的(手持式电动升降机310的)脱离的脚轮340的前侧视图。
62.在一个实施例中,头部342a具有拥有平坦或弯曲顶部及圆柱形底部的圆锥形形状。颈部342b具有圆柱形形状。颈部342b的至少一部分收容于外壳345内。外壳345是中空的,且具有上开口及下开口。颈部342b经配置使得颈部342b的直径略小于上开口的直径(即,外壳345的内径),使得颈部342b可在外壳345中在垂直方向上滑动。颈部342b可收容于外壳345中,外壳345的内表面与颈部342b的外表面之间没有间隙或间隙很小。头部342a的圆柱形底部经配置使得圆柱形底部的直径大于外壳345的内径,使得可通过外壳345的上表面阻止圆柱形底部在垂直方向上进一步向下移动。
63.在实施例中,外壳345经配置使得外壳345的外径略小于、略大于或相同于第一开口305a的直径。外壳345可穿过第一开口305a,以使用例如任何合适的连接件(例如,压配合、过盈配合、紧固件、粘合剂等)将止动件341连接(例如,固定、附接等)到腿部305。外壳345的上表面可与腿部305的端部的上表面齐平。
64.在一个实施例中,主体342c经配置使得主体342c的直径小于颈部342b的直径。主体342c的下部具有凹陷部,以容纳突出部344a。突出部344a可收容于主体342c的凹陷部中,凹陷部的内表面与突出部344a的外表面之间没有间隙或间隙很小。主体342c可靠在肩部344b上,使得主体342c的下表面可接触肩部344b的上表面。
65.在实施例中,主体342c经配置使得主体342c的直径略小于外壳345的下开口的直径,使得主体342c可在垂直方向上滑动穿过外壳345的下开口。主体342c与外壳345的下开口之间可能没有间隙或间隙很小。主体342c的至少一部分收容于外壳345内。在实施例中,肩部344b经配置使得肩部344b的直径大于外壳345的下开口的直径,使得可通过外壳345的下表面阻止肩部344b在垂直方向上进一步向上移动。
66.在实施例中,弹簧343可安置在外壳345内部及主体342c外部。弹簧343可在垂直方向上安置在颈部342b与外壳345的底部内表面之间。当头部342a被向下推动(例如,在垂直方向上)时,弹簧343可被来自颈部342b的力压缩。当头部342a上没有力(即,头部342a被释放)时,弹簧343可被解压缩,以将颈部342b(及头部342a)释放回其未推动的位置。将了解,在止动件341被组装并连接到腿部305之后,上部342可使用例如任何合适的连接件(例如,压配合、过盈配合、紧固件、粘合剂等)连接(例如,固定、附接等)到下部344,例如通过将主体342c及突出部344a连接在一起,使得销(342、344)可通过例如来自弹簧343、通道120的顶壁122(参见图6c及6d)等的力在垂直方向上作为一个整体向上及/或下移动。
67.在实施例中,凹陷部346a经配置使得凹陷部346a的直径大于底部344c的直径,使得底部344c可在垂直方向上滑动穿过凹陷部346a,以在头部342a被向下推动时到达轮347并与其接合。当头部342a未被向下推动时,底部344c的底表面位于凹陷部346a的上表面处、上方或周围,凹陷部346a在垂直方向上安置在轮347上方。
68.在实施例中,轮347具有中心347a。在垂直方向上,头部342a的轴、颈部342b的轴、主体342c的轴、弹簧343的轴、外壳345的轴、突出部344a的轴、肩部344b的轴、底部344c的轴彼此对准或重叠,并在侧平面视图中穿过中心347a。
69.图4d说明根据实施例的递送系统(110、210、310)中的图4a的(手持式电动升降机
310的)脱离的脚轮340的侧视图。
70.如图4d中所展示,通道120的顶壁122的高度低于上部342的头部342a的顶部的高度,且高于上部342的头部342a的底部(例如,圆柱形底部)的高度。通道120的顶壁122的高度高于脚轮340的所有其它组件及腿部305的所有其它组件,使得脚轮340可容纳于通道120中。
71.图5说明根据实施例的手持式电动升降机310的脚轮340的横截面侧视图。如图5中所展示,止动件341的上部342的头部342a在垂直方向上被向下推动,使得下部的底部穿过凹陷部346a,但止动件341没有被向下推动到足以与轮347接合。也就是说,止动件341仍位于轮347上方,且未与轮347接合,以防止轮347四周旋转。
72.图6a说明根据实施例的手持式电动升降机310的接合的脚轮340的横截面视图。图6b说明根据实施例的图6a的(手持式电动升降机310的)接合的脚轮340的前侧视图。图6c说明根据实施例的递送系统(110、210、310)中的图6a的(手持式电动升降机310的)接合的脚轮340的后侧视图。图6d说明根据实施例的递送系统(110、310)中的图6a的(手持式电动升降机310的)接合的脚轮340的侧视图。
73.在实施例中,在操作中,脚轮340的轮347安置在地板上(例如,制造地板,例如格栅地板等)。当脚轮340朝向通道120移动时,通道120的顶壁122可接触上部342的锥形头部342a。随着脚轮340进一步朝通道120移动并进入通道120,通道120的顶壁122可通过在锥形头部342a的侧上滑动并到达头部342a的顶表面而在垂直方向上向下推动止动件341(上部342及下部344)并压缩弹簧343。将了解,头部342a的锥形设计(或铁饼设计、曲线形状设计或任何其它合适的设计)可实现此类滑动。通道120经配置使得当脚轮340的整个止动件341容纳于通道120中时(参见图6c及6d),下部344的底部344c与轮347接合,以防止轮347旋转。也就是说,通道120的顶壁122的高度(即,头部342a的完全推动顶部的高度)确保下部344的底部344c与轮347接合,以防止当脚轮340的整个止动件341容纳于通道120中时轮347旋转。将了解,当下部344的底部344c与轮347接合以防止轮347旋转时,轮347仍可在朝着或远离通道120的方向上向前及/或向后移动。
74.在实施例中,在操作中,当脚轮340的整个止动件341容纳于通道120中,且脚轮340从通道120移开时,头部342a的顶部开始与通道120的顶壁122间隔开(即,止动件341不被顶壁122推动),且止动件341的弹簧343在垂直方向上解压缩并向上推动止动件341,使止动件341与轮347脱离,以允许轮347在止动件341从轮347释放时旋转。
75.图7a说明根据实施例的手持式电动升降机310的脱离的脚轮的侧视图。图7b说明根据实施例的手持式电动升降机310的接合的脚轮的侧视图。图7a及7b中的头部342d具有与图1到6d中的头部342a不同的设计。图7a及7b中的止动件的其它组件可与图1到6d中的那些相同。
76.如图7a及7b中所展示,头部342d具有铁饼形状,且附接到止动件的颈部。在实施例中,头部342d可为固定的。在另一实施例中,头部342d可沿其轴在垂直于纸张的方向上转动。当止动件与轮脱离时,头部342d的顶部具有高度a2,且脚轮的颈部(头部342d附接到的地方)具有高度a1。将了解,a1是物体(例如,通道120的顶壁122等)可开始向下按压止动件(例如,销)使得止动件与轮接合(例如,与轮中的槽接合)以防止轮旋转的位置/高度。当止动件与轮接合时,头部342d的顶部的高度变为a3,这是通道(例如,通道120)的顶壁的高度。
a3小于a2。a1小于a2。在实施例中,a3可小于a1。在另一实施例中,a3可等于a1。在实施例中,a1、a2及/或a3可经设计使得当向下按压止动件时,止动件(例如,销)可接合进轮的槽中达0.50英寸或更大的距离。
77.将了解,在一些实施例中,可使用止动件的其它设计或变体(例如,插座中的钥匙锁等)来与轮接合,以防止轮在例如轮位于止动件下方时旋转。例如,图7c说明根据实施例的手持式电动升降机310的脱离的脚轮的侧视图。图7d说明根据实施例的手持式电动升降机310的接合的脚轮的侧视图。如图7c及7d中所展示,止动件710可为弹簧加载的轮锁扣(例如,活板等)。机器边缘720可经设计或配置以向下压迫止动件710,以防止轮旋转。
78.方面:
79.方面1到7中的任一者都可与方面8到20中的任一者结合。
80.方面1.一种手持式电动升降机,所述升降机包括:长形桅杆;效应器,其附接到所述桅杆,所述效应器由电源控制以沿所述桅杆移动;处置器,其经配置以移动所述升降机;及至少一个脚轮,其中所述至少一个脚轮中的每一者包含止动件及轮,所述止动件是长形的并安置在所述轮上方,所述止动件经配置以与所述轮接合,以防止所述轮在所述止动件被向下推动时旋转,所述止动件经进一步配置以与所述轮脱离,以允许所述轮在所述止动件被释放时旋转。
81.方面2.根据方面1所述的手持式电动升降机,其中所述轮是旋转轮。
82.方面3.根据方面1或方面2所述的手持式电动升降机,其中所述至少一个脚轮包含两个前脚轮,所述升降机进一步包括两个后脚轮。
83.方面4.根据方面1到3中任一方面所述的手持式电动升降机,其中所述升降机的宽度为或约为21英寸。
84.方面5.根据方面1到4中任一方面所述的手持式电动升降机,其中所述升降机的承重能力范围从为或约为120磅到为或约为200磅。
85.方面6.根据方面1到5中任一方面所述的手持式电动升降机,其中所述止动件包含长形销。
86.方面7.根据方面1到6中任一方面所述的手持式电动升降机,其中所述止动件包含弹性体,当所述止动件没有被推动时,所述弹性体经配置以释放所述止动件,使得所述止动件与所述轮脱离。
87.方面8.一种递送系统,其包括:手持式电动升降机,其经配置以提升至少一个汽化器容器;及机柜,其经配置以固持所述至少一个汽化器容器,其中所述升降机包含长形桅杆;效应器,其附接到所述桅杆,所述效应器由电源控制以沿所述桅杆移动;处置器,其经配置以移动所述升降机;及至少一个脚轮,其中所述至少一个脚轮中的每一者包含止动件及轮,所述止动件是长形的并安置在所述轮上方,所述止动件经配置以与所述轮接合,以防止所述轮在所述止动件被向下推动时旋转,所述止动件经进一步配置以与所述轮脱离,以允许所述轮在所述止动件被释放时旋转,所述机柜包含至少一个通道,其经配置以容纳所述至少一个脚轮。
88.方面9.根据方面8所述的递送系统,其中所述轮是旋转轮。
89.方面10.根据方面8或方面9所述的递送系统,其中所述至少一个脚轮包含两个前脚轮,所述升降机进一步包括两个后脚轮。
90.方面11.根据方面10所述的递送系统,其中所述至少一个通道包含两个通道,所述两个通道中的每一者经配置以分别容纳所述两个前脚轮中的每一者。
91.方面12.根据方面8到11中任一方面所述的递送系统,其中所述升降机的宽度为或约为21英寸。
92.方面13.根据方面8到12中任一方面所述的递送系统,其中所述升降机的承重能力范围从为或约为120磅到为或约为200磅。
93.方面14.根据方面8到13中任一方面所述的递送系统,其中所述止动件包含长形销。
94.方面15.根据方面8到14中任一方面所述的递送系统,其中所述止动件包含弹性体,当所述止动件没有被推动时,所述弹性体经配置以释放所述止动件,使得所述止动件与所述轮脱离。
95.方面16.根据方面8到15中任一方面所述的递送系统,其中所述至少一个通道安置在所述机柜的底部处。
96.方面17.根据方面8到16中任一方面所述的递送系统,其中所述至少一个通道经配置使得当所述至少一个脚轮容纳于所述至少一个通道中时,所述至少一个通道的顶壁向下推动所述止动件以防止所述轮旋转。
97.方面18.根据方面8到17中任一方面所述的递送系统,其中所述机柜经固定到格栅地板。
98.方面19.根据方面18所述的递送系统,其中所述机柜经螺栓固定到所述格栅地板。
99.方面20.根据方面8到19中任一方面所述的递送系统,其中所述至少一个通道包含顶壁,当所述止动件与所述轮脱离时,所述顶壁的高度低于所述止动件的高度,使得当所述至少一个脚轮容纳于所述至少一个通道中时,所述顶壁向下推动所述止动件,且所述止动件与所述轮接合。
100.本实用新型中所公开的实例将在所有方面被视为说明性的且非限制性的。本实用新型的范围由所附权利要求书而不是前述描述指示;且在权利要求的同等含义及范围内的所有变更均旨在包含在其中。
101.本说明书中所使用的术语旨在描述特定实施例,且并非旨在限制。除非另有明确指示,否则术语“一”、“一个”及“所述”也包含复数形式。本说明书中所使用的术语“包括”及/或“包含”规定所陈述的特征、整数、步骤、操作、元件及/或组件的存在,但不排除一或多个其它特征、整数、步骤、操作、元件及/或组件的存在或添加。
102.关于前述描述,应理解,在不背离本实用新型的范围的情况下,可进行详细的更改,尤其是在所使用的构造材料以及部件的形状、大小及布置方面。本说明书及所描述的实施例仅是示范性的,本实用新型的真正范围及精神由随附权利要求书指示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1