一种基于K210的智能分类垃圾桶
一种基于k210的智能分类垃圾桶
技术领域
1.本实用新型涉及智能垃圾桶技术领域,具体为一种基于k210的智能分类垃圾桶。
背景技术:
2.垃圾分类是指按一定规定或标准将垃圾分类存储、投放和搬运,从而转变成公共资源的一系列活动的总称,垃圾分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用,减少垃圾处理量和处理设备的使用,降低处理成本,减少士地资源的消耗,具有社会、经济、生态三方面的效益,在进行垃圾分类时常使用语音识别智能垃圾桶或智能分类垃圾桶,使用语音识别智能垃圾桶时,使用者可通过语音的方式问询该垃圾属于什么类型的垃圾,语音识别智能垃圾桶对使用者的问询进行答复并打开相应的垃圾桶,使用者即可将垃圾丢至对应的垃圾桶内,使用智能分类垃圾桶时,将垃圾放入智能分类垃圾桶内,智能分类垃圾桶自动对垃圾进行识别并将该垃圾送至对应的垃圾桶内,实现垃圾的分类存放。
3.现有技术中,在进行垃圾分类时常使用语音识别智能垃圾桶或智能分类垃圾桶,使用语音识别智能垃圾桶时,需使用者的普通话水平要求较高,而对于聋哑人类残障人士无法使用,使用智能分类垃圾桶时,智能分类垃圾桶的结构过于复杂,生产成本较高。
技术实现要素:
4.本实用新型提供了一种基于k210的智能分类垃圾桶,具备使用方便和生产成本低的优点,以解决现有技术中,在进行垃圾分类时常使用语音识别智能垃圾桶或智能分类垃圾桶,对于聋哑人类残障人士无法使用语音识别智能垃圾桶,使用智能分类垃圾桶时,智能分类垃圾桶的结构过于复杂,生产成本较高的问题。
5.为实现使用方便和生产成本低的目的,本实用新型提供如下技术方案:一种基于k210的智能分类垃圾桶,包括底座,所述底座的顶部固定连接有挡板,所述底座的顶部放置有垃圾桶本体,所述挡板的顶部设置有分类机构,所述分类机构包括壳体,所述壳体固定连接在挡板的顶部,所述壳体的顶部活动连接有盖板,所述壳体的顶部固定连接有上舵机,所述上舵机的输出轴贯穿壳体并固定连接有拨板,所述拨板活动连接在壳体的内部,所述挡板顶部开设的凹槽内固定连接有下舵机,所述下舵机的输出轴贯穿壳体并固定连接有托盘,所述托盘活动连接在壳体的内部,且托盘的顶部与拨板的底部活动连接,所述壳体的内壁分别固定连接有摄像头和k210开发板,所述摄像头的顶部固定连接有照明灯,所述上舵机、下舵机和摄像头均与k210开发板电性连接。
6.作为本实用新型的一种优选技术方案,所述垃圾桶本体的数量为四个,四个所述垃圾桶本体分别为有害垃圾分类桶、可回收垃圾分类桶、厨余垃圾分类桶和其他垃圾分类桶。
7.作为本实用新型的一种优选技术方案,所述垃圾桶本体的表面设置有透明看窗,所述透明看窗为透明亚克力板。
8.作为本实用新型的一种优选技术方案,所述垃圾桶本体内壁的两侧分别固定连接
有光敏传感器和激光发射头,所述光敏传感器和激光发射头均与k210开发板电性连接。
9.作为本实用新型的一种优选技术方案,所述壳体的顶部固定连接有显示屏,所述显示屏与k210开发板电性连接。
10.作为本实用新型的一种优选技术方案,所述挡板和拨板均呈“十”字形。
11.与现有技术相比,本实用新型提供了一种基于k210的智能分类垃圾桶,具备以下有益效果:
12.1、该基于k210的智能分类垃圾桶,通过设置上舵机、拨板、托盘和下舵机,在使用时,打开盖板将垃圾放入壳体内的托盘上,摄像头对垃圾进行识别,通过上舵机和下舵机分别带动拨板和托盘运动,利用托盘与拨板的配合将垃圾输送至不同类型的垃圾桶本体内,实现垃圾的自动分类,无需进行语音识别,缩短垃圾分类投入时间,且整体结构简单,达到了使用方便和生产成本低的效果,以解决现有技术中,在进行垃圾分类时常使用语音识别智能垃圾桶或智能分类垃圾桶,对于聋哑人类残障人士无法使用语音识别智能垃圾桶,使用智能分类垃圾桶时,智能分类垃圾桶的结构过于复杂,生产成本较高的问题。
13.2、该基于k210的智能分类垃圾桶,通过设置光敏传感器和显示屏,在使用时,利用光敏传感器与激光发射头的配合,当垃圾桶本体内垃圾到达一定高度时,垃圾对光敏传感器接收激光发射头发射的红光有遮挡作用,光敏传感器向k210开发板输出相应信号,通过显示屏实现垃圾桶本体的满载预警功能,显示屏能够在智能分类垃圾桶待机状态时循环播放垃圾分类宣传视频,在垃圾投放完毕后显示相应的投放信息,在垃圾分类仓满载时显示满载预警,通过垃圾分类宣传视频能在一定程度上起到提高人们垃圾分类自觉性的作用,为垃圾分类的普及与推广做出了一定的贡献。
附图说明
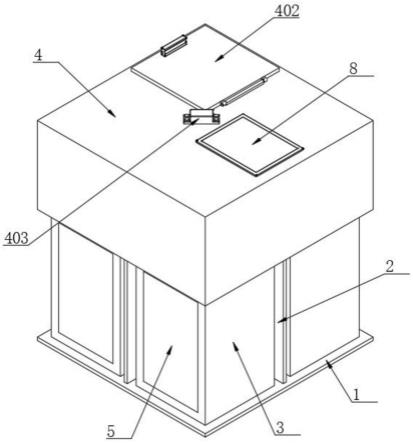
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的壳体位置处左剖图;
16.图3为本实用新型的壳体位置处结构示意图;
17.图4为本实用新型的拨板位置处结构示意图;
18.图5为本实用新型的托盘位置处结构示意图;
19.图6为本实用新型的垃圾桶本体位置处结构示意图。
20.图中:1、底座;2、挡板;3、垃圾桶本体;4、分类机构;401、壳体;402、盖板;403、上舵机;404、拨板;405、下舵机;406、托盘;407、摄像头;408、k210开发板;409、照明灯;5、透明看窗;6、光敏传感器;7、激光发射头;8、显示屏。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-6,本实用新型公开了一种基于k210的智能分类垃圾桶,包括底座1,底座1的顶部固定连接有挡板2,挡板2用于将四个垃圾桶本体3分隔开来,底座1的顶部放置有
垃圾桶本体3,挡板2的顶部设置有分类机构4,分类机构4包括壳体401,壳体401的底部设置有豁口,垃圾通过豁口即可掉落至垃圾桶本体3内,壳体401固定连接在挡板2的顶部,壳体401的顶部活动连接有盖板402,盖板402通过转轴活动连接在壳体401的顶部,盖板402翻转时以转轴为轴翻转,壳体401的顶部固定连接有上舵机403,上舵机403的输出轴贯穿壳体401并固定连接有拨板404,拨板404活动连接在壳体401的内部,挡板2顶部开设的凹槽内固定连接有下舵机405,下舵机405的输出轴贯穿壳体401并固定连接有托盘406,托盘406活动连接在壳体401的内部,且托盘406的顶部与拨板404的底部活动连接,壳体401的内壁分别固定连接有摄像头407和k210开发板408,k210开发板408主要由电源、flash芯片电路、k210芯片和wifi芯片四部分组成,将上舵机403、下舵机405、摄像头407、光敏传感器6、激光发射头7和显示屏8的控制程序烧录在k210开发板408内,即可由k210开发板408对上舵机403、下舵机405、摄像头407、光敏传感器6、激光发射头7和显示屏8进行控制,摄像头407的顶部固定连接有照明灯409,上舵机403、下舵机405和摄像头407均与k210开发板408电性连接,整个智能分类垃圾桶为柜式设计,节省放置空间,增加室内放置的美观度。
23.具体的,垃圾桶本体3的数量为四个,四个垃圾桶本体3分别为有害垃圾分类桶、可回收垃圾分类桶、厨余垃圾分类桶和其他垃圾分类桶。
24.本实施方案中,四个垃圾桶本体3分别存放有害垃圾、可回收垃圾、厨余垃圾和其他垃圾,且在初始状态时托盘406对应有害垃圾分类桶位置。
25.具体的,垃圾桶本体3的表面设置有透明看窗5,透明看窗5为透明亚克力板。
26.本实施方案中,透过透明看窗5方便直接观察垃圾桶本体3内垃圾存储的多少。
27.具体的,垃圾桶本体3内壁的两侧分别固定连接有光敏传感器6和激光发射头7,光敏传感器6和激光发射头7均与k210开发板408电性连接。
28.本实施方案中,在每个垃圾桶本体3中均在四分之三高度处设有一对光敏传感器6和激光发射头7,且激光发射头7照射光线刚好照射于光敏传感器6的感光口,光敏传感器6的do端与k210开发板408的io端口相连,光敏传感器6设有一定的感光阈值,当垃圾桶本体3中垃圾达到某一高度,垃圾桶本体3中环境光线亮度达不到光敏传感器6的设定阈值时,光敏传感器6的do端输出高电平,即此垃圾桶本体3已满载,当k210开发板408检测到光敏传感器6输出的高电平后,随后则在显示屏8上输出该垃圾桶已满,提醒人员应当及时清理垃圾桶本体3中的垃圾,当外界环境光线亮度超过设定阈值时,光敏传感器6的do端输出低电平,即表明此垃圾桶本体3未满载。
29.具体的,壳体401的顶部固定连接有显示屏8,显示屏8与k210开发板408电性连接。
30.本实施方案中,未投入垃圾或垃圾桶本体3未满载时,显示屏8处于待机状态,显示屏8能够循环播放垃圾分类宣传视频,当放入垃圾后,k210开发板408通过摄像头407拍摄所投入垃圾并进行识别和信息的传达,将垃圾的分类信息显示在显示屏8上,当某类垃圾桶本体3满载时,能够通过显示屏8显示满载预警。
31.具体的,挡板2和拨板404均呈“十”字形。
32.本实施方案中,“十”字形的挡板2用于将四个垃圾桶本体3分隔开来,“十”字形的拨板404方便与托盘406配合带动垃圾转动。
33.本实用新型的工作原理及使用流程:在使用时,打开盖板402,将垃圾放入壳体401内的托盘406上,照明灯409为垃圾的拍摄提供光照条件,便于垃圾的准确识别,摄像头407
对垃圾进行拍摄并由k210开发板408对垃圾进行识别,当识别为有害垃圾时,拨板404保持不动,下舵机405控制带动托盘406顺时针旋转九十度,此时托盘406与拨板404分离,垃圾即可投入有害垃圾分类桶中,随后下舵机405带动托盘406复位,当识别为可回收垃圾时,上舵机403和下分别控制拨板404与托盘406同时同速顺时针旋转九十度,随后拨板404保持不动,下舵机405带动托盘406逆时针回转九十度,此时托盘406与拨板404分离,垃圾即可投入可回收垃圾分类桶中,随后下舵机405带动拨板404复位,当识别为厨余垃圾时,上舵机403和下舵机405分别控制拨板404与托盘406同时同速顺时针旋转一百八十度,随后拨板404保持不动,下舵机405控制托盘406逆时针回转九十度,此时托盘406与拨板404分离,垃圾即可投入处于垃圾分类桶中,随后拨板404与托盘406复位,当识别为其他垃圾时,上舵机403和下舵机405分别控制拨板404与托盘406同时同速逆时针旋转九十度,随后拨板404保持不动,下舵机405控制托盘406顺时针回转九十度,此时托盘406与拨板404分离,垃圾即可投入其他垃圾分类桶中,随后拨板404复位,当垃圾桶本体3内垃圾到达一定高度时,利用光敏传感器6与激光发射头7的配合,垃圾对光敏传感器6接收激光发射头7发射的红光有遮挡作用,光敏传感器6向k210开发板408输出相应信号,通过显示屏8实现垃圾桶本体3的满载预警功能,显示屏8能够在智能分类垃圾桶待机状态时循环播放垃圾分类宣传视频,在垃圾投放完毕后显示相应的投放信息,在垃圾分类仓满载时显示满载预警。
34.综上所述,该基于k210的智能分类垃圾桶,通过设置上舵机403、拨板404、托盘406和下舵机405,以解决现有技术中,在进行垃圾分类时常使用语音识别智能垃圾桶或智能分类垃圾桶,对于聋哑人类残障人士无法使用语音识别智能垃圾桶,使用智能分类垃圾桶时,智能分类垃圾桶的结构过于复杂,生产成本较高的问题。
35.需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1