一种连续上料机构的制作方法
1.本实用新型涉及包装设备技术领域,特别是涉及一种连续上料机构。
背景技术:
2.很多产品出厂前都需要采用包装袋或包装膜进行包装,对于盒状、罐状产品,例如:细菌培养皿,有的是需要单独包装,有的是需要多个产品打包包装,现有的上料机构一般都是单个产品逐一进行上料,对于多个产品打包的情况需要进行多次上料,因此,影响产品上料的效率。
技术实现要素:
3.本实用新型所要解决的技术问题是:为了克服现有技术中的不足,本实用新型提供一种连续上料机构。
4.本实用新型解决其技术问题所要采用的技术方案是:一种连续上料机构,包括夹爪取料机构和旋转收料机构,其中,所述夹爪取料机构包括取料支撑组件、x轴移动组件、z轴移动组件和夹爪组件,所述x轴移动组件设置在取料支撑组件的上方,所述z轴移动组件连接在x轴移动组件上,且x轴移动组件能够带动z轴移动组件在x轴方向直线运动,所述夹爪组件设置在z轴移动组件上,且z轴移动组件能够带动夹爪组件在z轴方向运动,所述夹爪组件用于夹取产品输送至旋转收料机构上;x轴方向与z轴方向相互垂直,本实施例中x轴方向为水平方向,z轴方向为竖直方向。
5.所述旋转收料机构包括储料组件、支撑旋转组件和顶升气缸,所述储料组件用于放置夹爪组件抓取的产品,且所述储料组件设置在支撑旋转组件上,支撑旋转组件能够带动储料组件转动,使储料组件内的产品由收料工位转运至顶升工位,所述顶升气缸设置在顶升工位的正下方,用于向上顶起产品。
6.连续上料机构具有抓取工位、收料工位和顶升工位,夹爪组件在抓取工位和收料工位之间往复运动,支撑旋转组件在收料工位和顶升工位之间往复转动,其中,抓取工位指夹爪抓取产品的位置;收料工位指抓取组件将产品放入储料筒的位置;顶升工位指通过顶升气缸将储料筒内产品向上顶入包装袋的工位。
7.进一步,为了提高上料的效率,所述夹爪组件至少为一组,通过转接板连接在z轴移动组件的限位支撑板上,所述夹爪组件包括夹爪气缸、夹爪转接块和夹爪,所述夹爪气缸连接在转接板的底部,所述夹爪转接块和夹爪均为两个,且两个夹爪转接块相对设置在夹爪气缸底部的执行端上,通过夹爪气缸能够带动夹爪转接块相互靠近或远离,两个夹爪分别设置在夹爪转接块的底部。
8.进一步,所述x轴移动组件包括x轴支撑板、x轴移动伺服电机、同步带、同步带轮、x轴导轨、x轴滑块和光电传感器,所述x轴支撑板的背面连接在取料支撑组件上,所述x轴导轨为两根,平行设置在x轴支撑板前面的上下两端,每个x轴导轨上设有一x轴滑块,用于z轴移动组件的连接;所述同步带轮为两个设置在x轴导轨之间的左右两端,同步带设置在同步
带轮上,且其中一个同步带轮与x轴移动伺服电机传动连接,所述光电传感器设置在x轴支撑板的底部,用于检测z轴移动组件的位置;x轴支撑板上还设有用于走线的拖链,拖链的一端通过拖链支撑板连接在z轴移动组件的z轴支撑板上,能够随同z轴移动组件在x轴导轨上运动。
9.进一步,所述z轴移动组件包括z轴升降气缸、z轴支撑板、z轴导轨、z轴滑块和限位支撑板,所述z轴支撑板的背面通过x轴滑块滑动连接在x轴导轨上,所述z轴升降气缸设置在z轴支撑板的前面的上端,所述z轴导轨竖向安装在z轴升降气缸下方的z轴支撑板上,所述z轴滑块滑动连接在z轴导轨上,所述z轴升降气缸的推杆上连接所述限位支撑板,且所述限位支撑板的背面连接在x轴滑块上,且所述限位支撑板下端与z轴支撑板底部之间还设有限位缓冲件。
10.进一步,所述取料支撑机构包括取料底板、取料下底座、取料立柱、取料上底座和抱箍,所述取料立柱为两个,底部分别通过一取料下底座固定连接在取料底板上,所述取料上底座设置在取料立柱的上端,用于连接x轴移动组件的x轴支撑板,所述取料上底座下方的取料立柱上设有抱箍,抱箍用于硬限位,避免立柱上方的x移动机构下降,导致夹爪的高度变化。
11.进一步,所述储料组件包括第一储料筒、第二储料筒和接料伺服电缸,所述第一储料筒和第二储料筒对称设置在支撑旋转组件的两端,所述接料伺服电缸设置在收料工位的储料筒下方,且所述接料伺服电缸的推杆能够伸入储料筒内。采用两个储料筒可以提高上料的效率。
12.进一步,所述第一储料筒和第二储料筒的顶部侧壁上设有光纤传感器,用于检测储料筒内产品的数量。
13.进一步,所述支撑旋转组件包括收料底板和旋转伺服电机,所述收料底板设置在储料筒的下方,且与所述旋转伺服电机的输出轴连接,旋转伺服电机能够带动收料底板转动。使两端的储料筒在收料工位和顶升工位之间交替轮换。
14.当连续上料机构安装在旋转位置或空间受限的设备上时,由于旋转收料机构需要在一定的半径范围内转动的,因此,容易与其他机构产生干涉,因此,所述旋转收料机构还包括避位组件,所述避位组件包括第一小行程避位气缸、第二小行程避位气缸、第一料筒底座、第二料筒底座、第一料筒导轨和第二料筒导轨,所述第一料筒导轨和第二料筒导轨分别为两根,第一料筒导轨设置在第一储料筒两侧的收料底板上,所述第一储料筒底部通过第一料筒底座连接在第一料筒导轨上,且所述第一小行程避位气缸的推杆与第一料筒底座连接,通过第一小行程避位气缸带动第一料筒底座和第一储料筒在第一料筒导轨上运动;第二料筒导轨设置在第二储料筒两侧的收料底板上,所述第二储料筒底部通过第二料筒底座连接在第二料筒导轨上,且所述第二小行程避位气缸的推杆与第二料筒底座连接,通过第二小行程避位气缸带动第二料筒底座和第二储料筒在第二料筒导轨上运动;通过避位组件将两侧的储料筒向中间收拢后,然后再进行旋转,大大减小了储料筒旋转占用的空间范围,避免了与其他机构产生干涉。
15.本实用新型的有益效果是:本实用新型提供的一种连续上料机构,该上料机构能够同时满足单个产品上料或多个产品打包上料送入包装袋进行包装的情况,适用范围广泛,并且该机构结构简单,使用方便,可以装配在不同产品的包装设备上,实现自动上料。
附图说明
16.下面结合附图和实施例对本实用新型作进一步说明。
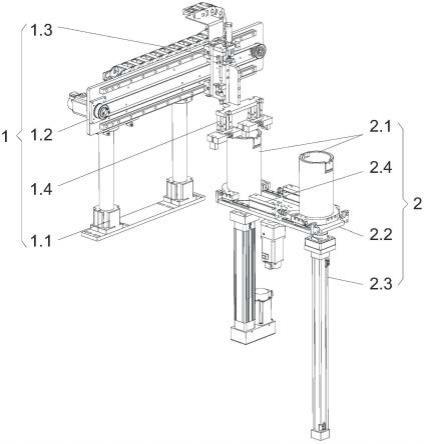
17.图1是本实用新型连续上料机构的结构示意图。
18.图2是夹爪取料机构的结构示意图。
19.图3是取料支撑组件的结构示意图。
20.图4是z轴移动组件的结构示意图。
21.图5是夹爪组件的结构示意图。
22.图6是旋转收料机构的结构示意图。
23.图7是储料筒的剖面结构示意图。
24.图中:1、夹爪取料机构,1.1、取料支撑组件、1.11、取料底板,1.12、取料下底座,1.13、取料立柱,1.14、取料上底座,1.15、抱箍,1.2、x轴移动组件,1.21、x轴支撑板,1.22、x轴移动伺服电机,1.23、同步带,1.24、同步带轮,1.25、x轴导轨,1.26、拖链,1.27、光电传感器,1.28、x轴滑块,1.29、拖链支撑板,1.3、z轴移动组件,1.31、z轴升降气缸,1.32、z轴支撑板,1.33、z轴导轨,1.34、z轴滑块,1.35、限位支撑板,1.36、限位缓冲件,1.4、夹爪组件,1.41、第一转接板,1.42、第二转接板,1.43、夹爪气缸,1.44、夹爪转接块,1.45、夹爪;2、旋转收料机构,2.1、储料组件,2.11、第一储料筒,2.12、第二储料筒,2.13、接料伺服电缸,2.14、光纤传感器,2.15、支撑环板,2.16、光纤安装口,2.2、支撑旋转组件,2.21、收料底板,2.22、旋转伺服电机,2.3、顶升气缸,2.4、避位组件,2.41、第一小行程避位气缸,2.42、第二小行程避位气缸,2.43、第一料筒底座,2.44、第二料筒底座,2.45、第一料筒导轨,2.46、第二料筒导轨。
具体实施方式
25.现在结合附图对本实用新型作详细的说明。此图为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
26.如图1所示,本实用新型的一种连续上料机构,包括夹爪取料机构1和旋转收料机构2,其中,所述夹爪取料机构1包括取料支撑组件1.1、x轴移动组件1.2、z轴移动组件1.3和夹爪组件1.4,所述x轴移动组件1.2设置在取料支撑组件1.1的上方,所述z轴移动组件1.3连接在x轴移动组件1.2上,且x轴移动组件1.2能够带动z轴移动组件1.3在x轴方向直线运动,所述夹爪组件1.4设置在z轴移动组件1.3上,且z轴移动组件1.3能够带动夹爪组件1.4在z轴方向运动,所述夹爪组件1.4用于夹取产品输送至旋转收料机构2上;x轴方向与z轴方向相互垂直,本实施例中x轴方向为水平方向,z轴方向为竖直方向。所述旋转收料机构2包括储料组件2.1、支撑旋转组件2.2和顶升气缸2.3,所述储料组件2.1用于放置夹爪组件1.4抓取的产品,且所述储料组件2.1设置在支撑旋转组件2.2上,支撑旋转组件2.2能够带动储料组件2.1转动,使储料组件2.1内的产品由收料工位转运至顶升工位,所述顶升气缸2.3设置在顶升工位的正下方,用于向上顶起产品。
27.如图2所示为夹爪取料机构1的结构示意图,其中,x轴移动组件1.2包括x轴支撑板1.21、x轴移动伺服电机1.22、同步带1.23、同步带轮1.24、x轴导轨1.25、x轴滑块1.28和光电传感器1.27,所述x轴支撑板1.21的背面连接在取料支撑组件1.1的取料上底座1.14上,所述x轴导轨1.25为两根,平行设置在x轴支撑板1.21前面的上下两端,每个x轴导轨1.25上
设有一x轴滑块1.28,用于z轴移动组件1.3的连接;所述同步带轮1.24为两个设置在x轴导轨1.25之间的左右两端,同步带1.23设置在同步带轮1.24上,且其中一个同步带轮1.24与x轴移动伺服电机1.22传动连接,所述光电传感器1.27设置在x轴支撑板1.21的底部,用于检测z轴移动组件1.3的位置;x轴支撑板1.21上还设有用于走线的拖链1.26,拖链1.26的一端通过拖链支撑板1.29连接在z轴移动组件1.3的z轴支撑板1.32上,能够随同z轴移动组件1.3在x轴导轨1.25上运动。
28.如图3所示,取料支撑机构包括取料底板1.11、取料下底座1.12、取料立柱1.13、取料上底座1.14和抱箍1.15,所述取料立柱1.13为两个,底部分别通过一取料下底座1.12固定连接在取料底板1.11上,所述取料上底座1.14设置在取料立柱1.13的上端,用于连接x轴移动组件1.2的x轴支撑板1.21,所述取料上底座1.14下方的取料立柱1.13上设有抱箍1.15,抱箍1.15用于硬限位,避免立柱上方的x移动机构下降,导致夹爪1.45的高度变化。
29.如图4所示,z轴移动组件1.3包括z轴升降气缸1.31、z轴支撑板1.32、z轴导轨1.33、z轴滑块1.34和限位支撑板1.35,所述z轴支撑板1.32的背面通过x轴滑块1.28滑动连接在x轴导轨1.25上,所述z轴升降气缸1.31设置在z轴支撑板1.32的前面的上端,所述z轴导轨1.33竖向安装在z轴升降气缸1.31下方的z轴支撑板1.32上,所述z轴滑块1.34滑动连接在z轴导轨1.33上,所述z轴升降气缸1.31的推杆上连接所述限位支撑板1.35,且所述限位支撑板1.35的背面连接在x轴滑块1.28上,且所述限位支撑板1.35下端与z轴支撑板1.32底部之间还设有限位缓冲件1.36,通过限位缓冲件1.36可以限制z轴下降的距离,提高安全性,同时,通过限位缓冲件1.36上的弹簧进行缓冲,避免下降时的冲击。
30.如图5所示,夹爪组件1.4至少为一组,本实施例中夹爪组件1.4为两组,通过转接板连接在z轴移动组件1.3的限位支撑板1.35上,转接板包括第一转接板1.41和第二转接板1.42,第一转接板1.41和第二转接板1.42形成倒置的t型结构,且第一转接板1.41固定在限位支撑板1.35上,两组夹爪组件1.4对称设置在第二转接板1.42底部的左右两侧,便于实现多个夹爪气缸1.43的连接。夹爪组件1.4包括夹爪气缸1.43、夹爪转接块1.44和夹爪气缸1.43连接在转接板的底部,所述夹爪转接块1.44和夹爪1.45均为两个,且两个夹爪转接块1.44相对设置在夹爪气缸1.43底部的执行端上,通过夹爪气缸1.43能够带动夹爪1.45转接块1.44相互靠近或远离,两个夹爪1.45分别设置在夹爪转接块1.44的底部。夹爪1.45相对的侧面上设有与产品外壁形状匹配的夹持面,本实施例中用于细菌培养皿夹持,细菌培养皿外形为圆形,因此,本实施例中夹持面为弧形夹持面。
31.如图6所示为旋转收料机构2的结构示意图,其中,储料组件2.1包括第一储料筒2.11、第二储料筒2.12和接料伺服电缸2.13,所述第一储料筒2.11和第二储料筒2.12对称设置在支撑旋转组件2.2的两端,所述接料伺服电缸2.13设置在收料工位的储料筒下方,且所述接料伺服电缸2.13的推杆能够伸入储料筒内。采用两个储料筒可以提高上料的效率。如图7所示,本实施例中第一储料筒2.11和第二储料筒2.12的结构相同,第一储料筒2.11和第二储料筒2.12的顶部侧壁上设有光纤安装口2.16,光纤安装口2.16内安装有光纤传感器2.14,用于检测储料筒内产品的数量,储料筒的底部均设有支撑环板2.15,中间的孔便于接料伺服电缸和顶升气缸2.3的抬升,支撑环板2.15用于支撑产品。
32.支撑旋转组件2.2包括收料底板2.21和旋转伺服电机2.22,所述收料底板2.21设置在储料筒的下方,且与所述旋转伺服电机2.22的输出轴连接,旋转伺服电机2.22能够带
动收料底板2.21转动。使两端的储料筒在收料工位和顶升工位之间交替轮换。当连续上料机构安装在旋转位置或空间受限的设备上时,由于旋转收料机构2需要在一定的半径范围内转动的,因此,容易与其他机构产生干涉,因此,所述旋转收料机构2还包括避位组件2.4,所述避位组件2.4包括第一小行程避位气缸2.41、第二小行程避位气缸2.42、第一料筒底座2.43、第二料筒底座2.44、第一料筒导轨2.45和第二料筒导轨2.46,所述第一料筒导轨2.45和第二料筒导轨2.46分别为两根,第一料筒导轨2.45设置在第一储料筒2.11两侧的收料底板2.21上,所述第一储料筒2.11底部通过第一料筒底座2.43连接在第一料筒导轨2.45上,且所述第一小行程避位气缸2.41的推杆与第一料筒底座2.43连接,通过第一小行程避位气缸2.41带动第一料筒底座2.43和第一储料筒2.11在第一料筒导轨2.45上运动;第二料筒导轨2.46设置在第二储料筒2.12两侧的收料底板2.21上,所述第二储料筒2.12底部通过第二料筒底座2.44连接在第二料筒导轨2.46上,且所述第二小行程避位气缸2.42的推杆与第二料筒底座2.44连接,通过第二小行程避位气缸2.42带动第二料筒底座2.44和第二储料筒2.12在第二料筒导轨2.46上运动;通过避位组件2.4将两侧的储料筒向中间收拢后,然后再进行旋转,大大减小了储料筒旋转占用的空间范围,避免了与其他机构产生干涉。
33.工作过程:
34.连续上料机构具有抓取工位、收料工位和顶升工位,夹爪组件1.4在抓取工位和收料工位之间往复运动,支撑旋转组件2.2在收料工位和顶升工位之间往复转动,其中,抓取工位指夹爪1.45抓取产品的位置;收料工位指抓取组件将产品放入储料筒的位置;顶升工位指通过顶升气缸2.3将储料筒内产品向上顶入包装袋的工位。
35.本实施例中,由于采用了两个夹爪组件1.4,因此,x轴支撑板1.21的底部的光电传感器1.27为四个,在抓取工位处设置两个光电传感器1.27,在收料工位设置两个光电传感器1.27分别用于检测z轴移动组件1.3是否到位,从而判断夹爪1.45是否到位,便于进行下一步的动作。
36.首先,x轴移动伺服电机1.22通过同步带1.23带动z轴移动组件1.3运动到抓取工位,然后,z轴升降气缸1.31下降,使夹爪1.45下降到能够夹持产品的位置,夹爪气缸1.43动作,使两侧的夹爪1.45靠近,夹持住产品,z轴升降气缸1.31升起,x轴移动伺服电机1.22反向转动,带动z轴移动组件1.3运动到收料工位,此时,第一储料筒2.11位于收料工位,然后z轴升降气缸1.31下降,夹爪气缸1.43控制夹爪1.45松开产品,将产品放入第一储料筒2.11内,此时,接料伺服电缸2.13处于向上顶起的状态,当产品进入第一储料筒2.11,放置在接料伺服电缸2.13上后,接料伺服电缸2.13下降一个产品高度,然后重复上述动作,继续上料,当第一储料筒2.11内放置的产品达到规定的数量后,由光纤传感器2.14将数量发送至控制单元,控制单元通过旋转伺服电机2.22带动收料底板2.21旋转180
°
使第一储料筒2.11转动至顶升工位,第二储料筒2.12转动至收料工位,需要注意的是,在转动前接料伺服电缸2.13的推杆需要从第一储料筒2.11内退出,使产品支撑在支撑环板2.15上,而接料伺服电缸2.13的推杆脱离产品,避免转动时的干涉。第二储料筒2.12开始接收产品,而第一储料筒2.11的产品则通过顶升工位的顶升气缸2.3将产品顶起,推入顶升工位上方的包装袋内,完成一次上料。当第二储料筒2.12内产品数量达到要求时,再次转动实现轮换。
37.在旋转伺服电机2.22启动前,第一小行程避位气缸2.41和第二小行程避位气缸2.42同时动作,将第一储料筒2.11和第二储料筒2.12向中心收拢,减小了储料筒旋转占用
的空间范围,避免了与其他机构产生干涉。
38.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关的工作人员完全可以在不偏离本实用新型的范围内,进行多样的变更以及修改。本项实用新型的技术范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1