一种双工位墙板码垛机的制作方法
1.本实用新型涉及墙板生产装备领域,特别是一种双工位墙板码垛机。
背景技术:
2.轻质墙板因具有轻质、保温隔热、抗震、隔音等诸多优异性能,已在一定应用领域逐渐取代了传统式建筑墙体材料。近年来,国家提出装配式建筑自动化、绿色化、规模化、可持续化发展。轻质墙板生产线制备过程中,在砂浆浇护、模具脱模后,需对其墙板初成品进行批量式码垛,经过一段时间自然放置后再进行养护窑内的蒸压养护,经蒸压养护后的墙板还需要再次进行码垛吊装。码垛机的作用在于起到从墙板制作阶段向墙板养护阶段的自动化衔接,以及完成最后的吊装成品流程,码垛机对于轻质墙板的最终制备品质、墙板生产线效率均能产生决定性影响。目前,码垛机普遍以机械手式及负压吸盘式为主。其中,机械手式码垛机技术难、成本高,定位及抓取精度难以保障,不利于大规模生产线制备;而负压吸盘式码垛机工作可靠性差,特别针对于多层复合轻质墙板,在整体养护前阶段,水泥砂浆并未完全反应成型,墙板体系内各物质的物理、化学结合性仍较差,负压吸盘极易破坏墙板完整性,如何发明一种低成本,高效率的码垛机已经成为行业内亟待解决的问题。
技术实现要素:
3.本实用新型的目的在于提供一种双工位墙板码垛机,通过两组升降机构和板材传送辊来控制固化车的逐层升降以及墙板的水平移动,实现墙板的高效平稳码垛。
4.本实用新型通过以下技术方案达到上述目的:
5.一种双工位墙板码垛机,包含机架、养护车升降架、板材传送辊。
6.所述机架为对称布置的箱式框架结构,所述箱式框架通过底部矩形框架与地面固定连接,所述箱式框架之间通过连接板固定连接。
7.所述养护车升降架包含升降架、链式提升装置。所述升降架为框架结构,所述升降架顶部设有养护车定位管。所述链式提升装置包含第一电机、传动链条、链轮、第一配重块、第二配重块、第一传动轴、第二传动轴,所述链式提升装置的第一电机、链轮、第一传动轴、第二传动轴分别通过安装座与机架固定连接。所述第一配重块、第二配重块、升降架分别通过移动副与机架连接。
8.所述板材传送辊包含固定架、第二电机、第三电机、传动链、链轮、第一动力辊、第二动力辊、第三动力辊、第四动力辊、第一传动辊、第二传动辊、第三传动辊、第四传动辊、第五传动辊。所述固定架包含底部框架和主立柱组件,所述底部框架与机架固定连接;所述主立柱组件底端与底部框架顶端固定连接,所述主立柱组件顶端分别与第二电机、第三电机、第一动力辊、第二动力辊、第三动力辊、第四动力辊、第一传动辊、第二传动辊、第三传动辊、第四传动辊、第五传动辊的安装座固定连接。
9.所述链轮包含第一链轮、第二链轮、第三链轮、第四链轮、第五链轮、第六链轮、第七链轮、第八链轮、第九链轮、第十链轮、第十一链轮、第十二链轮、第十三链轮、第十四链
轮。所述第一链轮、第十一链轮、第十四链轮分别与第一电机、第二电机、第三电机固定连接;所述第二链轮与第一传动轴一端固定连接,所述第三链轮通过安装座与机架固定连接,所述第四链轮与第二传动轴一端固定连接;所述第五链轮、第六链轮、第七链轮、第八链轮分别与第一传动轴、第二传动轴固定连接;所述第九链轮、第十链轮分别与第一动力辊、第二动力辊固定连接,所述第十二链轮、第十三链轮分别与第三动力辊、第四动力辊固定连接。
10.所述传动链包含第一传动链、第二传动链、第三传动链、第四传动链、第五传动链、第六传动链、第七传动链。所述第一传动链依次通过转动副与第一链轮、第二链轮、第三链轮、第四链轮连接;所述第二传动链一端与第一配重块固定连接,另一端与升降架固定连接,所述第二传动链通过转动副与第五链轮连接;所述第六传动链依次通过转动副与第九链轮、第十链轮、第十一链轮连接。所述第三传动链与第一配重块、升降架、第六链轮的连接方式,所述第四传动链与第二配重块、升降架、第七链轮的连接方式,所述第五传动链与第一配重块、升降架、第八链轮的连接方式和第二传动链与第一配重块、升降架、第五链轮的连接方式相同。所述第七传动链与第十二链轮、第十三链轮、第十四链轮的连接方式和第六传动链与第九链轮、第十链轮、第十一链轮连接方式相同。
11.该种双工位墙板码垛机的两个工位分别通过链式提升装置控制养护车升降,进一步可通过板材传送辊机构进行墙板的连续上架或架内墙板的连续出架作业。
12.与现有技术相比,本实用新型具有以下突出优点:
13.1.该种双工位墙板码垛机采用双工位作业,可自动化的进行墙板双进板、双出板、单进单出三种码垛作业方式,提高了墙板码垛效率,降低了生产成本。
14.2. 该种双工位墙板码垛机结构简单、造价低,通过链轮和链条合理配置,以及多个传动辊的配合,实现了墙板的高效码垛,既简化了结构,进一步又降低了生产成本。
附图说明
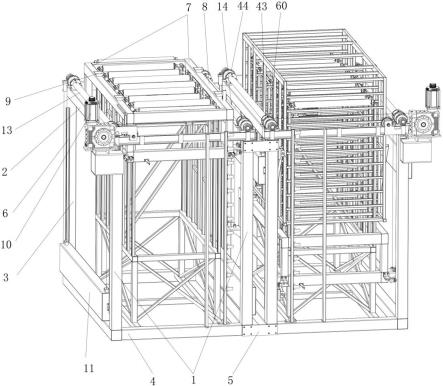
15.图1为本实用新型所述一种双工位墙板码垛机结构示意图之一。
16.图2为本实用新型所述一种双工位墙板码垛机结构示意图之二。
17.图3为本实用新型所述一种双工位墙板码垛机结构示意图之三。
18.图4为本实用新型所述一种双工位墙板码垛机结构示意图之四。
具体实施方式
19.对照图1、图2、图3、图4,该种双工位墙板码垛机,包含机架1、养护车升降架、板材传送辊。
20.对照图1,所述机架1为对称布置的箱式框架结构,包含顶部矩形框架2、立柱3、底部矩形框架4,所述机架1通过底部矩形框架4与地面固定连接,所述箱式框架之间通过连接板5固定连接;所述立柱2内设置有导向滑轨6。
21.对照图1、图2、图3,所述养护车升降架包含升降架7、链式提升装置。所述升降架7为框架结构,所述升降架顶部矩形钢管8上设有养护车定位管9,可防止养护车65在升降过程中发生晃动。所述链式提升装置包含第一电机10、传动链条、链轮、第一配重块11、第二配重块12、第一传动轴13、第二传动轴14,所述链式提升装置的第一电机10、链轮、第一传动轴
13、第二传动轴14分别通过安装座与机架1固定连接。所述第一配重块11两侧设置有第一滚轮15、第二滚轮16,所述第一滚轮15、第二滚轮16分别通过第一移动副17、第二移动副18与机架立柱3的导向滑轨6连接;所述升降架7的竖杆外侧设置有第三滚轮19、第四滚轮20,所述第一滚轮15、第二滚轮16分别通过第三移动副21、第四移动副22与机架立柱3侧面连接。所述第二配重块12与机架立柱3的导向滑轨6连接方式和第一配重块11与机架立柱3的导向滑轨6连接方式相同。
22.对照图1、图2、图3、图4,所述板材传送辊包含固定架23、第二电机24、第三电机25、传动链、链轮、第一动力辊26、第二动力辊27、第三动力辊28、第四动力辊29、第一传动辊30、第二传动辊31、第三传动辊32、第四传动辊33、第五传动辊34。所述固定架23包含底部框架35和主立柱组件36,所述底部框架35与机架底部矩形框架4固定连接;所述主立柱组件36底端与底部框架35顶端固定连接,所述主立柱组件36顶端分别与第二电机24、第三电机25、第一动力辊26、第二动力辊27、第三动力辊28、第四动力辊29、第一传动辊30、第二传动辊31、第三传动辊32、第四传动辊33、第五传动辊34的安装座固定连接。
23.对照图1、图3、图4,所述链轮包含第一链轮37、第二链轮38、第三链轮39、第四链轮40、第五链轮41、第六链轮42、第七链轮43、第八链轮44、第九链轮45、第十链轮46、第十一链轮47、第十二链轮48、第十三链轮49、第十四链轮50。所述第一链轮37、第十一链轮47、第十四链轮50分别与第一电机10、第二电机24、第三电机25的动力输出轴固定连接;所述第二链轮38与第一传动轴13一端固定连接,所述第三链轮39通过安装座与机架1顶部矩形框架2固定连接,所述第四链轮40与第二传动轴14一端固定连接;所述第五链轮41、第六链轮42、第七链轮43、第八链轮44分别与第一传动轴13、第二传动轴14固定连接;所述第九链轮45、第十链轮46分别与第一动力辊26、第二动力辊27固定连接,所述第十二链轮48、第十三链轮49分别与第三动力辊28、第四动力辊29固定连接。
24.对照图1、图2、图3、图4,所述传动链包含第一传动链51、第二传动链52、第三传动链53、第四传动链54、第五传动链55、第六传动链56、第七传动链57。所述第一传动链51依次通过第一转动副58、第二转动副59、第三转动副60与第一链轮37、第二链轮38、第三链轮39、第四链轮40连接;所述第二传动链52一端与第一配重块11固定连接,另一端与升降架7固定连接,所述第二传动链52通过第四转动副61与第五链轮41连接;所述第六传动链56依次通过第五转动副62、第六转动副63、第七转动副64与第九链轮45、第十链轮46、第十一链轮47连接。所述第三传动链53与第一配重块11、升降架7、第六链轮56的连接方式,所述第四传动链54与第二配重块12、升降架7、第七链轮43的连接方式,所述第五传动链55与第一配重块11、升降架7、第八链轮44的连接方式和第二传动链52与第一配重块11、升降架7、第五链轮55的连接方式相同。所述第七传动链57与第十二链轮48、第十三链轮49、第十四链轮50的连接方式和第六传动链56与第九链轮45、第十链轮46、第十一链轮47连接方式相同。
25.对照图1、图2、图3、图4,所述第一电机10通过第一传动链51驱动第一传动轴13与第二传动轴14转动,进一步驱动升降架7通过滚轮相对机架立柱3进行升降运动,同时第一配重块11、第二配重块12的滚轮沿机架立柱3的导向滑轨6同步运动,所述升降架7可带动养护车65进行升降运动。所述第二电机24、第三电机25分别通过第六传动链56、第七传动链57驱动第一动力辊26、第二动力辊27、第三动力辊28、第四动力辊29同向转动,传送墙板。该种双工位墙板码垛机设置有多个信号传感器,当检测到养护车65、墙板进入指定位置,对应的
电机开始通电,驱动各机构进行运动。
26.该种双工位墙板码垛机的具体作业工况如下:
27.对照图1、图2、图3、图4,该种双工位墙板码垛机在初始位置,此时升降架7位于最高点,养护车65由传输轨道输送到升降架7上,升降架7顶部的定位管9锁紧养护车65底部车轮66;进一步第一电机驱动升降架7和养护车65降落到最低位置,养护车65第一层与板材传送辊平面持平。
28.对照图1、图2、图3、图4,进一步,墙板由上一道工序传输到该工位,当信号传感器检测到墙板,第二电机24、第三电机25开始通电,驱动动力辊转动,进而动力辊与传动辊同步拖动墙板横移到养护车65第一层后,第二电机24、第三电机25停止通电,动力辊停止运动,墙板落在养护车65第一层。更进一步,第一电机24驱动升降架7上升一层,养护车65第二层与板材传送辊平面持平,开始第二层墙板码垛。周而复始,直到所有的层数都码垛完成。升降架7顶部的定位管9解锁,拉出养护车65,开始下一循环。
29.对照图1、图2、图3、图4,该种双工位墙板码垛机,出板作业流程与进板作业流程相反,首先将养护车65底层墙板传送出去;进一步,养护车65下降一层,传输该层墙板。周而复始,直到整个墙板传输完成,升降架7将养护车65抬升到顶端,将养护车65拉走,开始下一循环。
30.除说明书所述的技术特征外,均为本专业技术人员的已知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1