轨道移动式升降工作平台夹轨器的制作方法
1.本实用新型属于升降作业平台技术,具体涉及一种轨道移动式升降工作平台夹轨器,依靠该夹轨器可以将升降作业平台约束在轨道上并能沿着轨道移动。
背景技术:
2.轨道移动式升降工作平台,其底盘在轨道上移动,由于轨道的宽度一般是确定的,尤其是铁路的轨道,其间距是按照一个国家或地区的标准统一的。而升降工作平台在工作时,由于工作状态时受变幅(变幅的大小取决于作业范围)、风力、手动操作力等因素的影响,轨道轮在轨道上前后、左右两个方向形成的抗倾覆线不足于确保整机的稳定。
3.常见的夹轨器是用于限制轨道上的设备在大风等特殊情况下意外移动,与升降工作平台在移动时需要的夹轨稳定又有本质上的区别。因此,需要设计一种在升降工作平台移动时能够实时夹住轨道的装置。
技术实现要素:
4.本实用新型要解决的技术问题和提出的技术任务是克服现有夹轨器用于限制轨道上的设备在大风等特殊情况下意外移动,不适用于升降工作平台在移动时需要夹轨稳定的缺陷,提供一种轨道移动式升降工作平台夹轨器,依靠该夹轨器可以将升降作业平台约束在轨道上并能沿着轨道移动。
5.为达到上述目的,本实用新型的轨道移动式升降工作平台夹轨器,其特征是包括:
6.支座;
7.动力机,其固定于所述支座,其包括一个竖向的可被驱动着转动的螺纹杆;
8.夹持组件,其升降地被约束在所述支座;其包括螺母及对称的第一夹持部分、第二夹持部分;所述第一夹持部分包括第一夹持构件、第一关节连杆、第一夹轨轮,所述第一夹轨轮装配于所述第一夹持构件的下端;所述第二夹持部分包括第二夹持构件、第二关节连杆、第二夹轨轮,所述第二夹轨轮装配于所述第二夹持构件的下端;所述第一夹持部分与第二夹持部分对称分居于所述螺母两侧,所述第一夹持构件的中部与第二夹持构件的中部之间连接连杆,所述第一夹持构件的上端经所述第一关节连杆连接所述螺母的前侧,所述第二夹持构件的上端经所述第二关节连杆连接所述螺母的后侧;
9.所述螺纹杆与所述螺母通过传动螺纹配合以由所述动力机经所述螺纹杆带着所述螺母升降,所述螺母的升降经所述夹持组件转换为所述夹持组件的升降及所述第一夹轨轮与所述第二夹轨轮彼此靠拢或分开。
10.该夹轨器,由第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道,通过第一夹轨轮与第二夹轨轮彼此分开脱开对轨道的夹持。第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道时,夹轨轮能够沿着轨道滚动,促使升降工作平台在移动时夹轨稳定。
11.为了避免晃动,所述支座具有对称的左壁和右壁,所述第一夹持构件和第二夹持构件的左端与所述左壁滑动配合,所述第一夹持构件和第二夹持构件的右端所述右壁滑动
配合。
12.为了引导第一夹持部分、第二夹持部分在升降时动作,所述左壁的内表面具有左导向板,所述右壁的内表面具有右导向板,所述左导向板具有突出于所述左壁的内表面的左前导向边缘和左后导向边缘,所述右导向板具有突出于所述右壁的内表面的右前导向边缘和右后导向边缘,所述第一夹持构件和第二夹持构件的上端之间连接拉力弹簧,所述拉力弹簧的弹力促使所述第一夹持构件的上端接触在所述左前导向边缘和右前导向边缘,所述拉力弹簧的弹力促使所述第二夹持构件的上端接触在所述左后导向边缘和右后导向边缘。通过左导向板与右导向板的引导,令第一夹轨轮与第二夹轨轮彼此靠拢或分开。
13.尤其是,所述左前导向边缘上端和左后导向边缘上端之间的距离大于所述左前导向边缘下端和左后导向边缘下端之间的距离,所述右前导向边缘上端和右后导向边缘上端之间的距离大于所述右前导向边缘下端和右后导向边缘下端之间的距离。借此结构,令第一夹轨轮与第二夹轨轮彼呈分开状态下降靠近轨道,以便分别位于轨道的前后两侧,为后续的夹持提供位置保证。
14.为了增加配合的平顺性,所述第一夹持构件的上端经圆角接触在所述左前导向边缘和右前导向边缘,所述第二夹持构件的上端经圆角接触在所述左后导向边缘和右后导向边缘。
15.为了增加结构强度,所述第一夹持构件包括经第一筋板连接在一起的第一左侧板和第一右侧板,所述第二夹持构件包括经第二筋板连接在一起的第二左侧板和第二右侧板;所述第一左侧板和第二左侧板贴靠在所述左壁的内表面,所述第一右侧板和第二右侧板贴靠在所述右壁的内表面。
16.为了将第一夹持部分与第二夹持部分约束在适当的位置实现夹持轨道,所述左壁和右壁的前边缘之间连接前挡杆,所述左壁和右壁的后边缘之间连接后挡杆,所述第一夹持构件与第二夹持构件被约束在所述前挡杆与后挡杆之间。
17.为了增加沿着轨道方向的稳定性,所述第一夹轨轮包括至少两个并沿左右方向排列;所述第二夹轨轮包括至少两个并沿左右方向排列。
18.为了实现第一夹持部分与第二夹持部分下降时自行夹持轨道,所述连杆上设有向下延伸的触轨片;为了避免夹持住轨道时触轨片接触轨道产生摩擦,所述第一夹轨轮与所述第二夹轨轮彼此靠拢夹持住轨道时所述触轨片与轨道上表面保持间隙。
19.为了防止对通讯、信号的干扰,所述触轨片、第一夹轨轮与第二夹轨轮均为绝缘体。
20.为了确保安全,所述第一夹持构件和第二夹持构件上均设有钩,所述第一夹轨轮与所述第二夹轨轮彼此靠拢夹持住轨道时所述钩钩住轨道并与轨道保持间隙。在夹轨轮意外失效时,该钩能够起到一定的夹轨作用。
21.为了实现安全联动,配置安全联锁装置,所述第一夹轨轮与所述第二夹轨轮彼此靠拢夹持住轨道时所述安全联锁装置向升降工作平台的主控系统发送夹紧确认信号。据此,动力机可以与升降工作平台的升降控制线路设置成安全联锁控制,当夹轨器处于夹紧状态,将确认信号发送至升降工作平台的主控系统,否则,主控系统接收不到确认信号,无法启动升降工作平台的升降操作。从而实现了夹轨器保护安全作业的功能要求。当夹轨器处于夹轨状态方可进行设备的升高、变幅操作,以确保轨道移动式升降工作平台在高空作
业时的安全。
22.本实用新型由螺纹杆与螺母通过传动螺纹配合,由动力机经螺纹杆带着螺母升降,螺母的升降经夹持组件转换为夹持组件的升降及第一夹轨轮与第二夹轨轮彼此靠拢或分开。第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道时,夹轨轮能够沿着轨道滚动,促使升降工作平台在移动时夹轨稳定。
附图说明
23.图1为本实用新型轨道移动式升降工作平台夹轨器的一个轴侧图;
24.图2为图1所示夹轨器自前向后视角的正投影示意图;
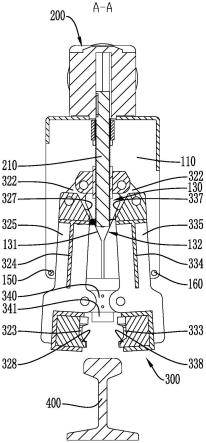
25.图3为图2中的a-a向剖视图;
26.图4为图2中的b-b向剖视图;
27.图5为图1所示夹轨器的结构分解示意图;
28.图6为图5中所示支座与夹持组件自前向后视角的正投影示意图;
29.图7为图6中的c-c向剖视图;
30.图8为本实用新型的夹持组件的结构分解示意图;
31.图中标号说明:
32.100支座:
33.110左壁,120右壁,
34.130左导向板,131左前导向边缘,132左后导向边缘,
35.140右导向板,141右前导向边缘,142右后导向边缘,
36.150前挡杆,160后挡杆,170顶板,180轴套,190耳部
37.200动力机,210螺纹杆;
38.300夹持组件:
39.310螺母,
40.320第一夹持部分,321第一夹持构件,322第一关节连杆,323第一夹轨轮,324第一筋板,325第一左侧板,326第一右侧板,327圆角,328钩,
41.330第二夹持部分,331第二夹持构件,332第二关节连杆,333第二夹轨轮,334第二筋板,335第二左侧板,336第二右侧板,337圆角,338钩,
42.340连杆,341触轨片,
43.350拉力弹簧;
44.400轨道。
具体实施方式
45.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
46.本实用新型的说明书和权利要求书中的术语“包括”和“具有”以及它们的任何变
形,意图在于覆盖不排他的包含,例如,包含了一系列技术特征的方法或产品,不必限于清楚地列出的那些技术特征,还可包括没有清楚地列出的能够包含在该方法或产品中的其它技术特征。
47.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图1标识的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
48.在本实用新型的描述中,需要理解的是,被术语“第一”、“第二”等具有顺序概念限定的技术特征,仅在于为了清楚地描述被限定的技术特征,使被限定的技术特征与其它技术特征能够清楚的区别开来,而不代表实际实施时这样命名,因此不能理解为对本实用新型的限制。
49.下面结合具体实施例及附图对本实用新型进行详细介绍。
50.如图1-5所示,该轨道移动式升降工作平台夹轨器包括支座100、动力机200和夹持组件300。
51.如图6-7所示,支座100具有对称的左壁110和右壁120,左壁110和右壁120的顶部由顶板170紧固连接在一起,所述紧固连接优选焊接,还可以是由钢板弯折而成。为了增加强度,左壁和右壁的前侧边缘的上部焊接前侧加强板,左壁和右壁的后侧边缘的上部焊接后侧加强板,而且后侧加强板向左右两侧分别延伸出耳部190,耳部用于将支座安装在升降工作平台的底盘上。具体实施时,根据将支座安装在底盘上的位置、方向以及底盘的结构,可以将耳部设在支座的其它位置,也可以将耳部用其它连接安装结构代替。为了增加强度,左壁和右壁的外表面均焊接竖向加强筋。为了扶持螺纹杆,在顶壁中间部位的下侧焊接有一个轴套180。
52.左壁110的内表面固定设有左导向板130,右壁120的内表面固定设有右导向板140,左导向板130具有突出于左壁的内表面的左前导向边缘131和左后导向边缘132,右导向板140具有突出于右壁的内表面的右前导向边缘141和右后导向边缘142。左导向板130与右导向板140左右对称。而且,左前导向边缘131上端和左后导向边缘132上端之间的距离大于左前导向边缘下端和左后导向边缘下端之间的距离,右前导向边缘141上端和右后导向边缘142上端之间的距离大于右前导向边缘下端和右后导向边缘下端之间的距离。而且,各个导向边缘平滑。左导向板与右导向板用于控制第一夹持构件和第二夹持构件的运动轨迹。
53.左壁110和右壁120的前边缘之间连接前挡杆150,左壁和右壁的后边缘之间连接后挡杆160。
54.因此,支座的左壁110和右壁120、前挡杆150与后挡杆160、前侧加强板与后侧加强板以及顶板170之间限定了安装空间。
55.动力机200固定于支座的顶板170的上表面,其包括一个竖向的可被驱动着转动的螺纹杆210。动力机优选用减速电机,或者是电机配减速机构,也可以是液压马达。
56.如图8所示,夹持组件300包括螺母310及对称的第一夹持部分320、第二夹持部分330。
57.第一夹持部分320包括第一夹持构件321、第一关节连杆322、两个第一夹轨轮323,
两个第一夹轨轮323沿左右方向排列装配于第一夹持构件321的下端。第二夹持部分330包括第二夹持构件331、第二关节连杆332、两个第二夹轨轮333,两个第二夹轨轮沿左右方向排列装配于第二夹持构件的下端。第一夹持部分320与第二夹持部分330对称分居于螺母310两侧,第一夹持构件321的中部与第二夹持构件331的中部之间连接两个连杆340,第一夹持构件321的上端经第一关节连杆322连接螺母310的前侧,第二夹持构件331的上端经第二关节连杆332连接螺母310的后侧。
58.而且,第一夹持构件321包括经第一筋板324连接在一起的第一左侧板325和第一右侧板326,第二夹持构件331包括经第二筋板334连接在一起的第二左侧板335和第二右侧板336。所述第一夹持构件和第二夹持构件上均设有钩328、338。
59.两个连杆340上均设有向下延伸的触轨片341,第一夹轨轮323与第二夹轨轮333彼此靠拢夹持住轨道时触轨片341与轨道400上表面保持间隙。
60.在高速铁路等轨道上作业,两轨道之间需要电信号隔离,防止对通讯、信号的干扰,因此,该种使用场合的夹轨器可以将夹轨轮、触轨片用工程塑料等绝缘材料制作。
61.将图8所示夹持组件300自下向上置于支座内的安装空间。第一左侧板325和第二左侧板335分别作为第一加持构件的左端、第二加持构件的左端贴靠在左壁110的内表面,第一右侧板326和第二右侧板336分别作为第一加持构件的右端、第二加持构件的右端贴靠在右壁120的内表面。使得第一夹持构件和第二夹持构件的左端与左壁滑动配合,第一夹持构件和第二夹持构件的右端右壁滑动配合。第一夹持构件和第二夹持构件的上端之间连接拉力弹簧350,拉力弹簧的弹力促使第一夹持构件321的上端接触在左前导向边缘131和右前导向边缘141,拉力弹簧的弹力促使第二夹持构件331的上端接触在左后导向边缘132和右后导向边缘142。而且,第一夹持构件的上端经圆角327接触在左前导向边缘131和右前导向边缘141,第二夹持构件的上端经圆角337接触在左后导向边缘132和右后导向边缘142。第一夹持构件与第二夹持构件被约束在前挡杆与后挡杆之间。从而,使得夹持组件被约束在支座内升降。
62.螺纹杆210穿过轴套180与螺母310通过传动螺纹配合,轴套与螺纹杆上的光轴段配合。由动力机经螺纹杆带着螺母升降,螺母的升降经夹持组件转换为夹持组件的升降及第一夹轨轮与第二夹轨轮彼此靠拢或分开。
63.此外,配置安全联锁装置,在夹持组件的行程中安装行程开关,第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道时触动行程开关,安全联锁装置向升降工作平台的主控系统发送夹紧确认信号。行程开关可以是机械式开关,也可以是光电式开关。
64.前述结构的夹轨器,由动力机200经螺纹杆210带着螺母310升降,螺母310的升降经夹持组件300转换为夹持组件的升降。在触轨片341接触轨道400前,第一夹持构件321与第二夹持构件331的姿态受导向板控制而不受连接在螺母上关节连杆控制,第一夹持构件与第二夹持构件向下移动时,第一夹轨轮323与第二夹轨轮333彼此分开。在第一夹持构件与第二夹持构件向下移动的过程中,第一夹轨轮与第二夹轨轮彼此分开接近轨道,触轨片341先触碰轨道400。当触轨片与轨道触碰后,第一夹持构件与第二夹持构件的姿态、夹轨轮与轨道的夹紧程度完全受螺母310及连接在螺母上的关节连杆控制,第一夹持构件与第二夹持构件向下移动时,此时第一夹持构件321与第二夹持构件331受螺母的下行力控制,关节连杆将第一夹持构件与第二夹持构件的上端撑开,第一夹持构件与第二夹持构件摆动,
第一夹持构件与第二夹持构件的下端靠拢,促使第一夹轨轮与第二夹轨轮靠近轨道直至完全接触轨道实现夹紧。由于第一夹轨轮和第二夹轨轮的轮廓形状与轨道的形状吻合,第一夹轨轮和第二夹轨轮夹紧轨道的过程具有自行适配调节位置的过程,因此,第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道时,触轨片与轨道上表面保持间隙,无需将触轨片做成轮式。
65.而且,第一夹轨轮与第二夹轨轮彼此靠拢夹持住轨道时,钩钩住轨道并与轨道保持间隙。
66.由于螺纹杆与螺母具有轴向自锁的性能,因此在作业过程中,只要动力机不转动,夹轨器的夹紧能力能够保持。
67.该夹轨器,第一夹持构件与第二夹持构件的下端靠拢时有利于缩小收藏尺寸,张开时有利于夹轨轮接近轨道。其中,第一夹轨轮与第二夹轨轮均为两个,增加了安全性冗余。同侧两个夹轨轮之间设有钩,钩与轨道的间隙要大于夹轨轮与轨道的间隙,以确保正常状态下,钩与轨道不接触,在轨道轮意外失效时,该钩能够起到一定的夹轨作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1