智能垃圾桶的制作方法
1.本公开涉及智能家居技术领域,尤其涉及一种智能垃圾桶。
背景技术:
2.垃圾桶是人们日常生活的必备品,用于存放垃圾和对垃圾进行分类,便于对不同类型的垃圾进行有效处理,极大地改善了环境状况。且随着科技的进步和人们生活水平的提高,智能家居逐步成为了人们日常生活中不可缺少的一部分。智能垃圾桶又称智能感应垃圾桶,是相对普通垃圾桶而言的。其中,智能垃圾桶因其干净卫生、使用便捷等优点而成被人们所喜爱。
3.然而,目前所使用的智能垃圾桶均不具备“空接垃圾”和“召之即来”的功能,若智能垃圾桶较远,需要用户走过去丢垃圾费时费力;若远距离扔垃圾,又会使垃圾掉落地上,使得办公室或居室变得脏乱;另外,针对多有行动不便的用户,走到垃圾桶边丢垃圾无疑非常困难,导致用户使用体验差。
技术实现要素:
4.为克服相关技术中存在的问题,本公开提供一种智能垃圾桶。
5.根据本公开实施例的第一方面,提供一种智能垃圾桶,所述智能垃圾桶包括:运动底座;以及桶体,安装于所述运动底座的上方,其中,所述桶体上设置有检测模块和控制模块,所述检测模块用于识别空中垃圾的位置,所述控制模块用于预判所述垃圾的落地点,所述控制模块分别与所述运动底座和所述检测模块连接。
6.在一些实施例中,所述检测模块包括深度相机,所述深度相机安装于所述桶体。
7.在一些实施例中,所述检测模块包括多个所述深度相机,多个所述深度相机间隔安装于所述桶体。
8.在一些实施例中,所述检测模块还包括rgb摄像头,所述rgb摄像头安装于所述桶体。
9.在一些实施例中,所述控制模块包括控制器,所述控制器安装于所述桶体,所述控制器与所述运动底座电连接,所述控制器与所述检测模块信号连接。
10.在一些实施例中,所述运动底座具有同步带轮机构,所述同步带轮机构包括底盘、移动轮组以及同步驱动机构,所述移动轮组和所述同步驱动机构位于所述底盘的两侧,所述同步驱动机构带动所述移动轮组同步转动和运动。
11.在一些实施例中,所述移动轮组包括:随动轮,安装于所述底盘;移动轮,安装于所述底盘并且位于所述随动轮的一侧;以及驱动部件,与所述移动轮连接,并且所述驱动部件与所述控制模块连接。
12.在一些实施例中,所述移动轮为多个,多个所述移动轮安装于所述底盘并且相对于所述随动轮对称设置。
13.在一些实施例中,所述移动轮组的转向架穿过所述底盘,并且穿过所述底盘的所
述转向架与所述同步驱动机构设置在同一侧,
14.所述同步驱动机构包括:同步轮,安装于所述转向架;同步驱动件,安装于所述底盘,所述同步驱动件与所述控制模块连接;以及同步带,所述同步带套设在所述同步轮,用于带动所述移动轮组同步转向。
15.在一些实施例中,所述智能垃圾桶还包括:桶盖,设置于所述桶体的顶端,所述桶盖上设置有感应模块,所述感应模块与所述控制模块信号连接。
16.本公开的实施例提供的技术方案可以包括以下有益效果:本公开通过提供包括运动底座的智能垃圾桶,在桶体上设置检测模块和控制模块,通过检测模块检测到垃圾空中的位置,将位置信息发送到控制模块,控制模块计算最终落点,驱动运动底座前往落点位置接住垃圾,告别传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能;通过检测模块检测到用户向垃圾桶招手,将招手信息发送到控制模块,控制模块驱动运动底座前往用户面前,实现了垃圾桶“召之即来”的功能;针对多有行动不便的用户,进一步提升了用户使用体验。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
18.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
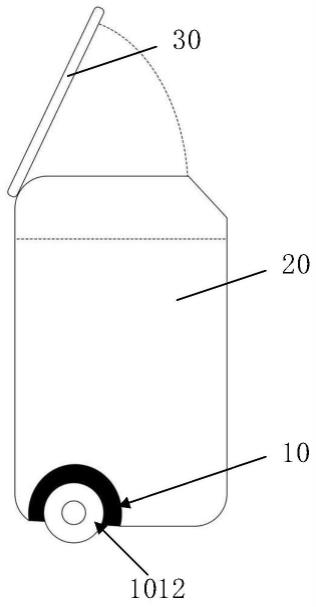
19.图1是根据一示例性实施例示出的一种智能垃圾桶第一视角下的结构示意图。
20.图2是根据一示例性实施例示出的一种智能垃圾桶第二视角下的结构示意图。
21.图3是根据一示例性实施例示出的移动轮组的结构示意图。
22.图4是根据一示例性实施例示出的同步驱动机构的结构示意图。
具体实施方式
23.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
24.垃圾桶是指丢放垃圾的容器。随着人们生活水平提高,家居生活现代化是必然的趋势。几乎传统垃圾行业都推出了各自的智能垃圾桶。智能垃圾桶和普通的垃圾桶相比,使用户的使用便捷。
25.相关技术中,智能垃圾桶在实际使用过程中,仍然无法满足用户丢垃圾自由的需求。智能垃圾桶不具备“空接垃圾”和“召之即来”的功能,若智能垃圾桶较远,需要用户走过去丢垃圾费时费力;若远距离扔垃圾,又会使垃圾掉落地上,使得办公室或居室变得脏乱;另外,针对多有行动不便的用户,走到垃圾桶边丢垃圾无疑非常困难,导致用户使用体验差,无法告别传统扔垃圾的方式,实现丢垃圾自由。
26.为解决上述技术问题,本公开的实施例提供一种智能垃圾桶。
27.如图1-2所示,一种智能垃圾桶,包括:运动底座10以及桶体20。
28.桶体20安装于所述运动底座10的上方,其中,所述桶体20上设置有检测模块201和控制模块,所述检测模块201用于识别空中垃圾的位置,所述控制模块用于预判所述垃圾的落地点,所述控制模块分别与所述运动底座10和所述检测模块201连接。
29.在本公开实施例中,桶体20可以为长方体结构,也可以为圆柱体结构,还可以为其他结构的桶体,只要能保证桶体20可以用来盛放垃圾即可。本实施例对此不作具体限定。本公开实施例优选为长方体结构,以便获得更大的容量来盛放垃圾。运动底座10用于实现智能垃圾桶的转动和运动。检测模块201用于识别空中垃圾的位置,当用户随意扔垃圾时,检测模块201能够迅速识别到空中垃圾的位置。控制模块用于预判所述垃圾的落地点,当检测模块201识别到空中垃圾的位置,并将位置信息发送给控制模块时,控制模块预判垃圾的落地点,提前移动到落点位置,接住垃圾。
30.采用上述方案,通过提供包括运动底座10的智能垃圾桶,在桶体20上设置检测模块201和控制模块(图中未示出),通过检测模块201检测到垃圾空中的位置,将位置信息发送到控制模块,控制模块计算最终落点,驱动运动底座10前往落点位置接住垃圾,告别传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能;通过检测模块检测到用户向垃圾桶招手,将招手信息发送到控制模块,控制模块驱动运动底座前往用户面前,实现了垃圾桶“召之即来”的功能;针对多有行动不便的用户,进一步提升了用户使用体验。
31.在一些实施例中,如图2所示,检测模块201包括深度相机2011,所述深度相机2011安装于所述桶体20。
32.其中,深度相机2011利用激光器照明光源,依据飞行时间(time of flight,tof)测距原理,可提供3d图像和点云数据的光电传感器。可以获取目标的深度信息借此实现3d扫描、场景建模、手势交互。
33.作为优选,检测模块201包括多个所述深度相机2011,多个所述深度相机2011间隔安装于所述桶体20。
34.具体地,深度相机2011可以为两个,两个深度相机2011间隔设置于桶体20。深度相机2011可以采用3d结构光相机。3d结构光相机是一种高精度三维测量系统,应用3d结构光相机能够更加精准地进行定位及导航。
35.深度相机2011还可以为三个,三个深度相机2011间隔设置于桶体20。深度相机2011可以采用3d结构光相机。3d结构光相机是一种高精度三维测量系统,应用3d结构光相机能够更加精准地进行定位及导航。
36.深度相机2011可以为四个,四个深度相机2011间隔设置于桶体20。深度相机2011可以采用3d结构光相机。3d结构光相机是一种高精度三维测量系统,应用3d结构光相机能够更加精准地进行定位及导航。
37.在本公开实施例中,通过深度相机2011检测到垃圾空中的位置,将位置信息发送到控制模块,控制模块计算最终落点,驱动运动底座10前往落点位置接住垃圾,告别传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能;通过深度相机
2011检测到用户向垃圾桶招手,将招手信息发送到控制模块,控制模块驱动运动底座前往用户面前,实现了垃圾桶“召之即来”的功能;针对多有行动不便的用户,进一步提升了用户使用体验。
38.在一些实施例中,如图2所示,检测模块201还包括rgb摄像头2012,所述rgb摄像头2012安装于所述桶体20。
39.其中,rgb摄像头2012即红(red,r)、绿(green,g)、蓝(blue,b)三色摄像头,红、绿、蓝三原色以不同比例叠加可呈现各种颜色,其拍摄的图像为rgb图像。
40.在本公开实施例中,通过rgb摄像头2012拍摄结合的深度相机2011进行垃圾识别,使得智能垃圾桶具有良好的识别准确度,大大提高了“空接垃圾”的准确度。
41.在一些实施例中,如图1-2所示,控制模块包括控制器(图中未示出),所述控制器安装于所述桶体20,所述控制器与所述运动底座10电连接,所述控制器与所述检测模块201信号连接。
42.其中,控制器与所述运动底座10之间可以通过导线连接,控制器与所述运动底座10之间也可以通过usb线连接,还可以采用其他形式的电连接,只要能实现控制器驱动运动底座10即可,本公开对此不做限制。控制器与所述检测模块201之间可以采用蓝牙信号连接,控制器与所述检测模块201之间也可以采用wifi信号连接,只要能实现控制器与检测模块201之间信号传输即可,本公开对此不做限制。
43.由上述结构可知,通过检测模块201检测到垃圾空中的位置,将位置信息发送到控制器,控制器计算最终落点,驱动运动底座10前往落点位置接住垃圾,告别传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能;通过检测模块检测到用户向垃圾桶招手,将招手信息发送到控制器,控制器驱动运动底座前往用户面前,实现了垃圾桶“召之即来”的功能;针对多有行动不便的用户,进一步提升了用户使用体验。
44.在一些实施例中,如图1、图3和图4所示,所述运动底座10具有同步带轮机构101,所述同步带轮机构101包括底盘1011、移动轮组1012以及同步驱动机构1013,所述移动轮组1012和所述同步驱动机构1013位于所述底盘1011的两侧,所述同步驱动机构1013带动所述移动轮组1012同步转动和运动。
45.一方面,通过检测模块201检测到垃圾空中的位置,将位置信息发送到控制模块,控制模块计算最终落点,控制模块控制同步驱动机构1013启动,同步驱动机构1013带动移动轮组1012同步转动和运动,使得运动底座10前往落点位置接住垃圾。避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能。
46.另一方面,通过检测模块检测到用户向垃圾桶招手,将招手信息发送到控制模块,控制模块控制同步驱动机构1013启动,同步驱动机构1013带动移动轮组1012同步转动和运动,使得运动底座10前往用户面前,实现了垃圾桶“召之即来”的功能;针对多有行动不便的用户,进一步提升了用户使用体验。
47.在一些实施例中,如图3所示,移动轮组1012包括:随动轮10121、移动轮10122以及驱动部件10123。
48.随动轮10121安装于所述底盘1011;移动轮10122安装于所述底盘1011并且位于所
述随动轮10121的一侧;以及驱动部件10123与所述移动轮10122连接,并且所述驱动部件10123与所述控制模块连接。
49.其中,随动轮10121和移动轮10122上均设有防滑纹,随动轮10121和移动轮10122均采用万向轮的结构方式,利于移动轮组1012的转动和移动。驱动部件10123采用电机,具体地,驱动部件10123采用步进电机。驱动部件10123与所述控制模块可以电连接,例如,通过导线连接或通过usb线连接,还可以采用其他形式的电连接,只要能实现控制模块启动驱动部件10123即可,本公开对此不做限制。驱动部件10123与所述控制模块可以信号连接,例如,采用蓝牙信号连接,也可以采用wifi信号连接,还可以采用其他形式的信号连接,只要能实现控制模块启动驱动部件10123即可,本公开对此不做限制。
50.由此可知,移动轮组1012中的驱动部件10123驱动移动轮10122转动,配合随动轮10121,使得运动底座10前往落点位置接住垃圾,告别传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力。
51.在一些实施例中,如图2所示,移动轮10122为多个,多个所述移动轮10122安装于所述底盘1011并且相对于所述随动轮10121对称设置。
52.其中,当移动轮10122为两个时,两个所述移动轮10122安装于所述底盘1011并且相对于所述随动轮10121对称设置。
53.当移动轮10122为三个时,三个所述移动轮10122安装于所述底盘1011并且其中两个移动轮10122相对于所述随动轮10121对称设置,第三个移动轮10122与随动轮10121相对设置。
54.当移动轮10122为四个时,四个所述移动轮10122安装于所述底盘1011并且四个移动轮10122相对于所述随动轮10121对称设置。
55.在一些实施例中,如图4所示,移动轮组1012的转向架(图中未示出)穿过所述底盘1011,并且穿过所述底盘1011的所述转向架与所述同步驱动机构1013设置在同一侧,
56.所述同步驱动机构1013包括:同步轮10131、同步驱动件10132以及同步带10133。
57.同步轮10131安装于所述转向架;同步驱动件10132安装于所述底盘1011,所述同步驱动件10132与所述控制模块连接;以及,所述同步带10133套设在所述同步轮10131,用于带动所述移动轮组1012同步转向。
58.在本公开实施例中,同步轮10131由钢,铝合金,铸铁,黄铜等材料制造,其内孔有圆孔,d形孔,锥形孔等形式,同步轮10131的外部设置有齿状。同步带10133是以钢丝绳或玻璃纤维为强力层,外覆以聚氨酯或氯丁橡胶的环形带,同步带10133的内周制成齿状,使其与同步轮10131外部的齿状相啮合。同步驱动件10132采用电机,具体地,驱动部件10123采用步进电机。
59.通过上述结构可知,同步驱动件10132驱动同步带10133,配合同步轮10131可实现移动轮组1012中随动轮10121和移动轮10122的同步转向运动。
60.在一些实施例中,如图1-2所示,智能垃圾桶还包括:桶盖30。
61.桶盖30设置于所述桶体20的顶端,所述桶盖30上设置有感应模块(图中未示出),所述感应模块与所述控制模块信号连接。
62.其中,感应模块与所述控制模块可以采用蓝牙信号连接,也可以采用wifi信号连接,只要能实现控制模块与感应模块之间信号传输即可,本公开对此不做限制。桶体20与桶
盖30可以采用枢接方式,当感应模块感应到有垃圾时,桶盖30智能开启,以便于垃圾丢进智能垃圾桶中。
63.在本公开实施例中,当用户随意扔垃圾时,检测模块201检测到垃圾在空中的位置,将位置信息发送到控制模块,控制模块计算最终落点,驱动运动底座10前往落点位置并打开桶盖30,接住垃圾。能够实现“空接垃圾”的功能。此外,当用户向智能垃圾桶招手时,智能垃圾桶的检测模块201检测到招手信号,将招手信息发送到控制模块,控制模块驱动运动底座10自主移动到用户面前,实现垃圾桶主动“过来”,即实现“召之即来”功能。告别了传统扔垃圾的方式,避免了用户走过去丢垃圾费时费力,同时避免了发生垃圾掉落地上,使得办公室或居室变得脏乱的情况。实现了丢垃圾自由,能够实现“空接垃圾”功能;尤其针对多有行动不便的用户,进一步提升了用户使用体验。
64.可以理解的是,本公开中“多个”是指两个或两个以上,其它量词与之类似。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
65.进一步可以理解的是,术语“第一”、“第二”等用于描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开,并不表示特定的顺序或者重要程度。实际上,“第一”、“第二”等表述完全可以互换使用。例如,在不脱离本公开范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。
66.进一步可以理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。
67.进一步可以理解的是,除非有特殊说明,“连接”包括两者之间不存在其他构件的直接连接,也包括两者之间存在其他元件的间接连接。
68.进一步可以理解的是,本公开实施例中尽管在附图中以特定的顺序描述操作,但是不应将其理解为要求按照所示的特定顺序或是串行顺序来执行这些操作,或是要求执行全部所示的操作以得到期望的结果。在特定环境中,多任务和并行处理可能是有利的。
69.本领域技术人员在考虑说明书及实践这里公开的实用新型后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利范围指出。
70.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利范围来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1