输送模块及光学检测装置的制作方法
1.本实用新型是关于一种输送模块,以及配置有此输送模块的光学检测装置。
背景技术:
2.随着现今人们对电子产品的需求日益增加,电子产品中零件部件的品质也因而成为半导体产业的重要课题。除了改善及提升零件部件的制造技术外,能够准确地对零件部件进行检测也变得越来越重要。
3.举例而言,在半导体产业中,光学检测装置普遍被采用以对不同的印刷电路板进行各种光学检测。因此,光学检测装置的作业效能无疑受到相当的关注。
技术实现要素:
4.本实用新型的目的之一在于提供一种输送模块,其能输送较重的待测物,并让影像获取元件及光源以相对待测物较贴近的角度对待测物的底部进行影像获取及照明。
5.根据本实用新型的一实施方式,一种输送模块包含输送带、机台以及至少一转轴。机台配置以驱动输送带至少部分于某一平面沿某一方向传动。转轴具有中心轴线,而转轴配置以绕中心轴线转动,且转轴包含沿中心轴线相连接的锥形部以及柱形部。柱形部可转动地连接机台,锥形部的表面至少部分重合上述的平面以承托输送带。
6.在本实用新型一或多个实施方式中,上述的锥形部的表面围绕而形成若干锐角,此锐角远离柱形部。中心轴线与平面之间形成若干角度,上述的锐角等于上述的角度的两倍。
7.在本实用新型一或多个实施方式中,上述的输送模块还包含至少一轴承。此轴承设置于机台,转轴的柱形部沿中心轴线穿越轴承。
8.在本实用新型一或多个实施方式中,上述的轴承的数量为多个,这些轴承沿中心轴线彼此分离。
9.在本实用新型一或多个实施方式中,上述的转轴的数量为多个,这些转轴沿上述的方向排列并彼此分离。
10.在本实用新型一或多个实施方式中,上述的中心轴线彼此平行。
11.本实用新型的目的的一在于提供一种光学检测装置,其能输送较重的待测物,并让影像获取元件及光源以相对待测物较贴近的角度对待测物的底部进行影像获取及照明。
12.根据本实用新型的一实施方式,一种光学检测装置包含两输送带、机台、多个转轴以及影像获取元件。输送带配置以承托并输送待测物,输送带沿第一方向彼此分离。机台配置以驱动输送带分别至少部分于某一平面沿第二方向传动,第二方向垂直于第一方向。转轴沿第二方向排列成两排,转轴彼此分离并与输送带位于平面的相对两侧。转轴分别具有中心轴线,且分别配置以绕中心轴线转动。转轴包含沿中心轴线相连接的锥形部以及柱形部。锥形部位于柱形部之间。柱形部可转动地连接机台,锥形部的表面至少部分重合上述的平面以承托对应的输送带。影像获取元件与转轴位于上述的平面的相同侧,并配置以获取
待测物的影像。
13.在本实用新型一或多个实施方式中,上述的锥形部的表面围绕而形成若干锐角,此锐角远离对应的柱形部,对应的中心轴线与平面之间形成若干角度,上述的锐角等于上述对应的角度的两倍。
14.在本实用新型一或多个实施方式中,上述的光学检测装置还包含光源。此光源与转轴位于上述的平面的相同侧,并配置以朝向待测物照明。
15.在本实用新型一或多个实施方式中,上述的光学检测装置还包含多个轴承。这些轴承设置于机台,转轴的柱形部沿对应的中心轴线穿越至少一轴承。
16.本实用新型上述实施方式至少具有以下优点:
17.(1)由于转轴的锥形部具有锥形的形状,且锥形部的表面围绕而形成锐角,因此,光源能够以相对待测物较贴近的角度(相同于锥形部的锐角)朝向待测物的底部照明,而影像获取元件亦能够以相对待测物较贴近的角度(相同于锥形部的锐角)对待测物的底部进行影像获取。而且,有赖于锥形部的形状,待测物的底部靠近输送带因转轴的遮挡而无法被影像获取元件进行影像获取或被光源照明的部分能够有效缩减,因而能提升光学检测装置的操作灵活性。
18.(2)由于转轴的锥形部具有锥形的形状,且承托输送带的锥形部相对柱形部朝上倾斜,因此,转轴具有坚固的几何结构作为悬臂以承托输送带及待测物的重量。
19.(3)当待测物承托于输送带上并受到输送带的带动而沿第二方向移动时,由于转轴可绕中心轴线转动,因此转轴不会对承托于锥形部上的输送带产生过大的摩擦力。如此一来,对于重量较大的待测物,光学检测装置亦可容易地使其在输送带上沿第二方向移动。
附图说明
20.图1为绘示依照本实用新型一实施方式的光学检测装置的立体示意图;
21.图2为绘示图1的光学检测装置的立体示意图,其中输送带及待测物被省略;
22.图3为绘示图1沿线段a-a的剖面图;
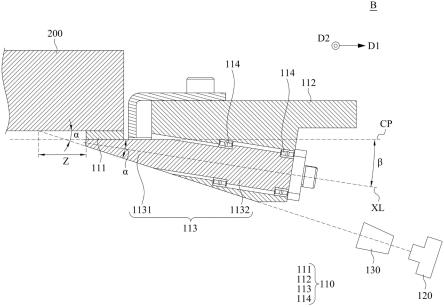
23.图4为绘示图3的范围b的局部放大示意图,其中影像获取元件及光源相对待测物倾斜;
24.图5为绘示图3的范围b的局部放大示意图,其中影像获取元件相对待测物倾斜而光源位于待测物的正下方;
25.图6为绘示图3的范围b的局部放大示意图,其中光源相对待测物倾斜而影像获取元件位于待测物的正下方。
26.【符号说明】
27.100:光学检测装置
28.110:输送模块
29.111:输送带
30.112:机台
31.113:转轴
32.1131:锥形部
33.1132:柱形部
34.114:轴承
35.120:影像获取元件
36.130:光源
37.200:待测物
38.a-a:线段
39.al:左排
40.ar:右排
41.b:范围
42.cp:平面
43.d1:第一方向
44.d2:第二方向
45.xl:中心轴线
46.z:下阴影遮蔽区
47.α:锐角
48.β:角度
具体实施方式
49.以下将以附图揭露本实用新型的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型部分实施方式中,这些实务上的细节是非必要的。此外,为简化附图起见,一些习知惯用的结构与元件在附图中将以简单示意的方式绘示之,而在所有附图中,相同的标号将用于表示相同或相似的元件。且若实施上为可能,不同实施例的特征是可以交互应用。
50.除非另有定义,本文所使用的所有词汇(包括技术和科学术语)具有其通常的意涵,其意涵是能够被熟悉此领域者所理解。更进一步的说,上述的词汇在普遍常用的字典中的定义,在本说明书的内容中应被解读为与本实用新型相关领域一致的意涵。除非有特别明确定义,这些词汇将不被解释为理想化的或过于正式的意涵。
51.请参照图1~2。图1为绘示依照本实用新型一实施方式的光学检测装置 100的立体示意图。图2为绘示图1的光学检测装置100的立体示意图,其中输送带111及待测物200被省略。在本实施方式中,如图1~2所示,一种光学检测装置100包含两输送模块110,而每个输送模块110包含输送带111(输送带111请见图1)、机台112以及多个转轴113(转轴113请见图2)。具体而言,两输送模块110的机台112可为共同结构,而输送带111实际上可为皮带。输送带111沿第一方向d1彼此分离,并配置以承托并沿第二方向d2 输送待测物200,第二方向d2垂直于第一方向d1。在实务的应用中,待测物 200例如可为印刷电路板,但本实用新型并不以此为限。机台112配置以驱动输送带111分别至少部分于平面cp(平面cp请见图3~4)沿第二方向d2 传动,以使输送带111可沿第二方向d2输送待测物200。实际上,输送带111 例如是由机台112的马达驱动,然而,为使附图更简洁,马达未绘示于附图中,而机台112的其他部件亦被省略。具体而言,转轴113沿第二方向d2分成两排排列,例如图2所示的左排al及右排ar,而沿左排al排列及沿右排ar 排列的转轴113均在第二方向d2上彼此分离。
52.请参照图3。图3为绘示图1沿线段a-a的剖面图。在本实施方式中,转轴113与输送带111连接于平面cp,亦即转轴113与输送带111位于平面cp 的相对两侧。如图3所示,输送带111位于平面cp的上方,而转轴113则位于平面cp的下方。再者,转轴113具有中心轴线xl,且转轴113配置以绕中心轴线xl转动,而转轴113包含锥形部1131以及柱形部1132。锥形部1131 与柱形部1132沿中心轴线xl相连接,而柱形部1132可转动地连接机台112。具体而言,如图3所示,多个转轴113的锥形部1131位于柱形部1132之间,亦即多个转轴113的锥形部1131指向机台112的内侧,以利承托待测物200。在本实施方式中,如图2所示,转轴113的中心轴线xl彼此平行,而中心轴线xl实际上可垂直于第二方向d2。
53.另外,光学检测装置100还包含影像获取元件120。影像获取元件120与转轴113位于平面cp的相同侧,如图3所示,影像获取元件120与转轴113 均位于平面cp的下方,而影像获取元件120配置以获得待测物200的底部的影像,从而让使用者可对待测物200进行检测。为使附图更简洁,影像获取元件120未绘示于图1~2中。
54.再者,光学检测装置100还包含光源130。光源130与转轴113位于平面 cp的相同侧,如图3所示,光源130与转轴113均位于平面cp的下方,而光源130实际上相较影像获取元件120更接近待测物200。具体而言,光源130 配置以朝向待测物200的底部照明,以利影像获取元件120获取待测物200 的底部的影像。为使附图更简洁,光源130未绘示于图1~2中。
55.请参照图4。图4为绘示图3的范围b的局部放大示意图,其中影像获取元件120及光源130相对待测物200倾斜。如图4所示,锥形部1131的表面围绕而形成锐角α,锐角α远离柱形部1132,而对应的中心轴线xl与平面 cp之间形成角度β。值得注意的是,在本实施方式中,锐角α等于角度β的两倍,亦即角度β为锐角α的一半。换句话说,通过转轴113相对平面cp以角度β倾斜,锥形部1131的表面可至少部分重合平面cp以承托对应的输送带111。在实务的应用中,锐角α的范围可在16度至20度之间,例如锐角α可为16度、17度、18度、19度或20度等,但本实用新型并不以此为限。举例而言,当锥形部1131的锐角α等于18度时,角度β则等于9度,亦即转轴 113的中心轴线xl相对平面cp倾斜9度。
56.进一步而言,由于转轴113的锥形部1131具有锥形的形状,且锥形部1131 的表面围绕而形成锐角α,因此,光源130能够以相对待测物200较贴近的角度(相同于锐角α)朝向待测物200的底部照明,而影像获取元件120亦能够以相对待测物200较贴近的角度(相同于锐角α)对待测物200的底部进行影像获取,如图4所示。举例而言,当锥形部1131的锐角α等于18度时,光源 130能够相对待测物200倾斜18度以朝向待测物200的底部照明,而影像获取元件120亦能够相对待测物200倾斜18度以对待测物200的底部进行影像获取。
57.而且,有赖于锥形部1131的形状,待测物200的底部靠近输送带111因转轴113的遮挡而无法被影像获取元件120进行影像获取或被光源130照明的部分(或称为“下阴影遮蔽区z”,如图4所示)能够有效缩减,因而能提升光学检测装置100的操作灵活性。在实务的应用中,举例而言,下阴影遮蔽区 z的宽度可缩减至8.3厘米。
58.在实务的应用中,输送模块110还包含多个轴承114。这些轴承114设置于机台112,而转轴113的柱形部1132沿对应的中心轴线xl穿越至少一轴承 114。举例而言,如图4所示,被柱形部1132穿越的轴承114的数量为两个,且这些轴承114沿中心轴线xl彼此分离,因而有利于转轴113支撑输送带111 及待测物200的重量。
59.进一步而言,由于转轴113的锥形部1131具有锥形的形状,且承托输送带111的锥
形部1131相对柱形部1132朝上倾斜,因此,转轴113具有坚固的几何结构作为悬臂以承托输送带111及待测物200的重量。
60.再者,当待测物200承托于输送带111上并受到输送带111的带动而沿第二方向d2移动时,由于转轴113可绕中心轴线xl转动,因此转轴113不会对承托于锥形部1131上的输送带111产生过大的摩擦力。如此一来,对于重量较大的待测物200,光学检测装置100亦可容易地使其在输送带111上沿第二方向d2移动。
61.举例而言,通过转轴113坚固的结构,光学检测装置100可承托重达15 公斤的待测物200,而通过转轴113可相对输送带111转动的连接关系,光学检测装置100更可容易地使重达15公斤的待测物200在输送带111上沿第二方向d2移动。
62.请参照图5~6。图5为绘示图3的范围b的局部放大示意图,其中影像获取元件120相对待测物200倾斜而光源130位于待测物200的正下方。图6 为绘示图3的范围b的局部放大示意图,其中光源130相对待测物200倾斜而影像获取元件120位于待测物200的正下方。在操作光学检测装置100时,根据实际状况,影像获取元件120与光源130分别相对待测物200的倾斜角度可以不同。举例而言,如图5所示,影像获取元件120相对待测物200以相同于锐角α的角度倾斜,而光源130则位于待测物200的正下方。另外,如图6 所示,光源130相对待测物200以相同于锐角α的角度倾斜,而影像获取元件 120则位于待测物200的正下方。
63.综上所述,本实用新型上述实施方式所揭露的技术方案至少具有以下优点:
64.(1)由于转轴的锥形部具有锥形的形状,且锥形部的表面围绕而形成锐角,因此,光源能够以相对待测物较贴近的角度(相同于锥形部的锐角)朝向待测物的底部照明,而影像获取元件亦能够以相对待测物较贴近的角度(相同于锥形部的锐角)对待测物的底部进行影像获取。而且,有赖于锥形部的形状,待测物的底部靠近输送带因转轴的遮挡而无法被影像获取元件进行影像获取或被光源照明的部分能够有效缩减,因而能提升光学检测装置的操作灵活性。
65.(2)由于转轴的锥形部具有锥形的形状,且承托输送带的锥形部相对柱形部朝上倾斜,因此,转轴具有坚固的几何结构作为悬臂以承托输送带及待测物的重量。
66.(3)当待测物承托于输送带上并受到输送带的带动而沿第二方向移动时,由于转轴可绕中心轴线转动,因此转轴不会对承托于锥形部上的输送带产生过大的摩擦力。如此一来,对于重量较大的待测物,光学检测装置亦可容易地使其在输送带上沿第二方向移动。
67.虽然本实用新型已以实施方式揭露如上,然其并非用以限定本实用新型,任何熟悉此技艺者,在不脱离本实用新型的精神和范围内,当可作各种的更动与润饰,因此本实用新型的保护范围当视所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1