一种用于电路板的智能全自动摆料装置的制作方法
1.本实用新型涉及电路板生产技术领域,尤其涉及一种用于电路板的智能全自动摆料装置。
背景技术:
2.电路板可称为印刷线路板pcb,fpc线路板又称柔性线路板柔性电路板是以聚酰亚胺或聚酯薄膜为基材制成的一种具有高度可靠性,绝佳的可挠性印刷电路板。具有配线密度高、重量轻、厚度薄、弯折性好的特点。在电路板的生产过程中,需要将各种零部件安装在电路板上,而且各种零部件都有其特定的位置,因此在生产过程中就需要将各种零部件进行精准的摆放。
3.目前,现有的电路板摆料装置每次都仅能拿取单个零件,并在拿取后每次也就只是对单个零件进行摆放,无法实现多零件的同步拿取和摆放,以此就大大降低了电路板生产中零件摆放的效率;而且在现有技术中,多数是通过夹取的方式进行拿取零件,如此就很容易对零件造成机械损伤,进而降低了电路板生产的质量。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在无法实现多零件的同步拿取和摆放,在夹取的过程中容易对零件造成机械损伤的问题,而提出的一种用于电路板的智能全自动摆料装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种用于电路板的智能全自动摆料装置,包括底板,所述底板上表面左侧固定连接有卡接板,所述底板上表面中部固定连接有机械手,所述底板上表面右侧固定连接有零件盘;
7.所述机械手上端固定连接有吸风机,所述吸风机输入端固定连接有吸附板,所述吸附板前端面等间距开设有吸风槽,所述吸风槽内壁螺纹连接有吸盘,所述吸附板前端面位于吸风槽上部均转动连接有盖板,所述盖板另一端靠近吸附板的一侧固定连接有上磁块,所述吸附板前端面位于吸风槽下部均固定连接有下磁块。
8.优选地,所述吸盘与吸附板内腔相连通,且所述吸盘吸附端设置有多种形状。
9.优选地,所述上磁块与下磁块相对齐,所述下磁块与上磁块磁性连接,且下磁块与上磁块为软磁材料制成。
10.优选地,所述吸附板前端面位于吸风槽处均固定连接有密封圈,所述密封圈为柔性橡胶材质制成。
11.优选地,所述卡接板两侧均开设有滑槽,所述滑槽内部滑动连接有定位板,所述定位板与滑槽侧壁之间固定有定位弹簧。
12.优选地,所述零件盘内壁通过十字板隔断有种类槽,每个所述种类槽内均设置有多个零件槽。
13.相比现有技术,本实用新型的有益效果为:
14.本实用新型通过吸附板、吸风槽、吸盘、以及密封圈的设置,利用吸风机在吸附板内产生负压,以此能够快速的将零件进行吸附摆放,从而提高了该装置的生产效率,并利用吸附的方式能够大大降低拿取过程中对零件造成的损伤,从而提高了对零件的保护效果;并且根据不同生产所需,开启不同数量的吸风槽,并安装上不同种类和数量的吸盘,从而实现多个零件以及多种零件同时进行吸附与摆放,以此进一步提高了该装置的生产效率。
附图说明
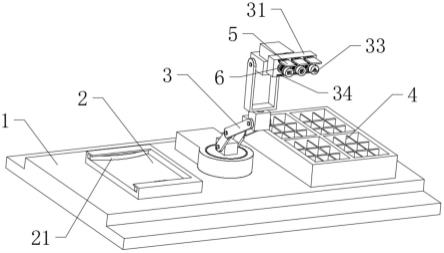
15.图1为本实用新型提出的一种用于电路板的智能全自动摆料装置的主视整体结构示意图;
16.图2为本实用新型提出的一种用于电路板的智能全自动摆料装置的俯视局部剖结构示意图;
17.图3为本实用新型提出的一种用于电路板的智能全自动摆料装置的机械手端部结构示意图。
18.图中:1、底板;2、卡接板;21、定位板;22、定位弹簧;3、机械手;31、吸附板;32、吸风槽;33、吸盘;34、下磁块;4、零件盘;5、盖板;51、上磁块;6、密封圈。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1、图2和图3,一种用于电路板的智能全自动摆料装置,包括底板1,底板1上表面左侧固定连接有卡接板2,底板1上表面中部固定连接有机械手3,底板1上表面右侧固定连接有零件盘4;
21.机械手3上端固定连接有吸风机,吸风机输入端固定连接有吸附板31,吸附板31前端面等间距开设有吸风槽32,吸风槽32内壁螺纹连接有吸盘33,吸附板31前端面位于吸风槽32上部均转动连接有盖板5,盖板5另一端靠近吸附板31的一侧固定连接有上磁块51,吸附板31前端面位于吸风槽32下部均固定连接有下磁块34。
22.参照图3,其中,吸盘33与吸附板31内腔相连通,且吸盘33吸附端设置有多种形状;
23.其中,需要进行说明的是,机械手3采用的是stm32/ard/51瓴乐可编程遥控机械手,吸风机采用的是,wm7060-24v直流负压吸风机;
24.通过上述结构的设置,能够自动化的完成对零件的吸取,并且可以精准的对零件进行摆放,从而提高了该装置的工作效率;并利用吸附的方式能够大大降低拿取过程中对零件造成的损伤,从而提高了对零件的保护效果;而且还能够通过开启不同数量的吸风槽32,并安装不同种类和数量的吸盘33,从而实现多个零件以及多种零件的吸附摆放工作,以此进一步提高了该装置的生产效率。
25.参照图3,其中,上磁块51与下磁块34相对齐,下磁块34与上磁块51磁性连接,且下磁块34与上磁块51为软磁材料制成;
26.通过上述结构的设置,利用下磁块34与上磁块51之间的磁性连接,能够使得盖板5
将吸风槽32进行封堵,从而能够提升其他吸风槽32内的吸附力,适用于吸附较重的零件,也可以根据使用的所需调整同时使用的吸风槽32数量,以此提高了该装置的实用性。
27.参照图2、图3,其中,吸附板31前端面位于吸风槽32处均固定连接有密封圈6,密封圈6为柔性橡胶材质制成;
28.通过上述结构的设置,首先能够提高吸盘33与吸风槽32螺纹固定时的密封效果,并且当盖板5下翻使得吸风槽32封闭时,利用吸风机在此处吸风槽32内产生的吸附力,使得盖板5与吸风槽32紧密贴合,从而也提高了盖板5将吸风槽32封闭时的密封效果。
29.参照图1、图2,其中,卡接板2两侧均开设有滑槽,滑槽内部滑动连接有定位板21,定位板21与滑槽侧壁之间固定有定位弹簧22;
30.通过上述结构的设置,能够提高电路板放置时的稳定性,确保摆料的准确性,以此提高了电路板的生产质量。
31.参照图1,其中,零件盘4内壁通过十字板隔断有种类槽,每个种类槽内均设置有多个零件槽;
32.通过上述结构的设置,能够将多种不同的零件进行分类,从而便于对机械手3进行调控,降低了工作过程中寻找零件的所需时间,进而提高了该装置的生产效率。
33.参照图1-3,本实用新型中,首先对机械手3的吸附路径进行设定,然后将电路板推送至卡接板2内,在电路板推送的过程中,将会同时对两侧定位板21进行挤压,从而使得定位弹簧22发生回缩,以此利用定位弹簧22的回弹效果,对电路板实现固定;接下来将吸盘33与吸风槽32之间进行螺纹连接,使得吸盘33与吸风槽32内腔相连通,并且在吸盘33螺纹旋进的过程中,将会对密封圈6进行挤压,以此能够确保吸盘33获取良好的吸附效果,随即利用机械手3各关节的移动和转动使得吸盘33对准零件盘4内所需吸附的零件,然后吸风机开始工作,使得吸盘33内产生负压,进而将零件盘4内各种不同的零件吸附至吸盘33内,随即再次通过机械手3各关节的移动和转动,将零件精准的摆放至电路板上;并且在使用之前,根据不同生产所需,还能够通过开启不同数量的吸风槽32,并安装上不同种类和数量的吸盘33,从而实现多个零件以及多种零件的吸附摆放工作;
34.并且针对不使用的吸风槽32,将盖板5下翻,使得盖板5对吸风槽32进行封闭,并且利用吸风机在此处吸风槽32内产生的吸附力,能够使得盖板5与吸风槽32紧密贴合,以此确保其他吸风槽32内的吸附效果。
35.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1