一种送料机构的制作方法
1.本实用新型涉及废旧物资处理行业,因此提供了一种送料机构。
背景技术:
2.物料被破碎后会形成碎屑,这些碎屑会被收集或者以某种形式被容纳在容器中,当需要对碎屑进行转运时,现有技术中一般通过链网或者传送带将其转运,转运过程中物料的输送量通过控制传送带的输送速度而控制,但是传送带机构设计复杂,能耗较大,仅用于控制输送量会有一定的浪费,现有的物料被收集后在输送无论是通过传送带还是绞龙轴,其对于物料下料速度不可控,因此需要对此处进行改进,其次现有技术中还缺少能够实现,低污染量的物料输送思路,比如通过传送带物料会飞散并被抛飞,在输送至存料罐的过程中,其存料罐需要顶部开口,这种方式存在碎屑或者物料污染的可能性,对于轻质材料应该需要提供能够低磨削量的输送方式。
技术实现要素:
3.实用新型目的在于解决现有产品的物料输送速度控制成本高的问题,本实用新型针对提供了一种送料机构,其实现了下料速度可控,物料输送光滑的特点,具有无磨削磨损、低污染等优秀性能。
4.提供的技术方案为:
5.提供了一种送料机构,包括
6.支架,
7.料斗,固定配装在支架上;
8.出料管,接通在料斗的底端,并且水平伸出;
9.驱动电机,设置在出料管的一侧,并且和同轴配装在出料管内的绞龙轴动力连接;
10.用于产生负压的负压管8,负压管8接通在出料管的出料端。
11.进一步的,所述的支架包括四角对立设置的四个支撑腿,各个支撑腿固定相连形成四角支撑的机架,料斗固定在各个支撑腿之间围合形成空间处。
12.进一步的,所述的料斗为锥形料斗,料斗的底部为缩口状,料斗的底端对接水平延伸的出料管的进料端。
13.进一步的,所述的绞龙轴沿着出料管延伸成盘绕状,绞龙轴的延伸长度小于出料管的长度。
14.进一步的,所述的料斗的上部还配装有用于检测物料高度的对射传感器,对射传感器包括发射端和接收端,发射端和接收端成直线设置分别配装在料斗的对应端板上。
15.进一步的,所述的料斗的出料端为矩形开口,所述的绞龙轴配置在出料端的下方,绞龙轴的长度完全覆盖矩形开口的开口长度。
16.进一步的,所述的料斗的下部为锥斗状的锥斗部分,在锥斗部分的每个折角处都设置有竖直延伸的立板,各个立板的顶角处依次固定相连成方框状。
17.与现有技术而言具有的有益效果在于:
18.1.新设计下料机构可以保证物料下放过程中的速度平稳,以控制在被抽取过程中的出料速度,通过恒定的负压抽取,即可保证物料被下料后可以持续性的被输送至预设空间中。
19.2.通过负压管路实现的负压抽取,对于接收容器而言,其可以根据需求设置为敞口或封口状,其结构设计不再受到结构限制。
20.3.所设计的机构支撑效果佳,组件的组合性能较好,通过支架支撑料斗并搭配绞龙轴,可以输送物料的同时控制物料输出速度,小型绞龙轴的结构较小能耗较低。
21.4.机构的集成度高,一体性较好,本机构包含的各个组件之间衔接配合所组成的动作链,动作过程连贯,衔接性能好,整体机构简单高效,能够胜任大批量的送料梳料工作。
附图说明
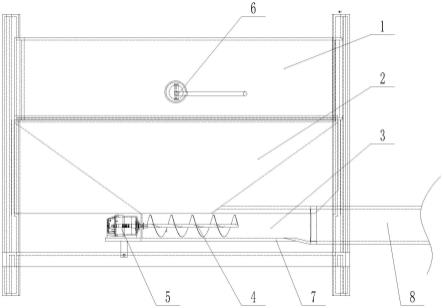
22.图1是送料机构的正视结构图。
23.图2是送料机构轴视结构图。
24.图3是送料机构俯视结构图。
25.图4是送料机构侧视结构图。
26.图5是送料机构仰视结构图。
具体实施方式
27.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
28.以下根据附图1-5对本实用新型做进一步说明,
29.提供了一种送料机构,包括支架10,支架10选用四角支架10,支架10各个支腿之间通过横梁相连。还包括料斗1,料斗1固定配装在支架10上;料斗1选用锥斗状的料斗1,在料斗1的底端接通出料管7,出料管7水平伸出,出料管7选用直管,料斗1选用金属材质的方形锥筒状料斗1,其中料斗1在重力作用下其内的物料会自动下坠进入出料管7中。
30.为保证设备的自动化性能还包括驱动电机5,驱动电机5设置在出料管7的一侧,并且和同轴配装在出料管7内的绞龙轴4动力连接,绞龙轴4为盘旋在中心轴外的盘旋状的具有一定径向高度的刀片体,绞龙轴4跟随自身的中心轴回转,其中出料管7会接通用于产生负压的负压管8,负压管8接通在出料管7的出料端。
31.作为送料机构可选的方案之一,所述的支架10包括四角对立设置的四个支撑腿,各个支撑腿固定相连形成四角支撑的机架,料斗1固定在各个支撑腿之间围合形成空间处,通过料斗1与支撑腿的固定连接保证了,料斗1稳固的支撑性能,料斗1姿态水平,通过将支撑腿的地脚固定设置,保证料斗1整体的稳固性能。
32.所述的料斗1选用锥形料斗1,料斗1的底部为缩口状,料斗1的底端对接水平延伸的出料管7的进料端。
33.作为送料机构可选的方案之一,如图1所示的,所述的绞龙轴4沿着出料管7延伸成
盘绕状,绞龙轴4的延伸长度小于出料管7的长度,绞龙轴4的覆盖面积覆盖料斗1的出料口,绞龙轴4在非动作状态可以封死出料口,绞龙轴4在动作状态会疏通出料口。
34.为提高设备的自动化效能,所述的料斗1的上部还配装有用于检测物料高度的对射传感器6,对射传感器6包括发射端和接收端,发射端和接收端成直线设置分别配装在料斗1的对应端板上,在使用过程中发射端会照射接收端以检测当前时刻的物料高度,所述的料斗1的出料端为矩形开口,所述的绞龙轴4配置在出料端的下方,绞龙轴4的长度完全覆盖矩形开口的开口长度。如图1和图5所示,所述的料斗1的下部为锥斗状的锥斗部分2,在锥斗部分2的每个折角处都设置有竖直延伸的立板,各个立板的顶角处依次固定相连成方框状。
35.对射传感器6型号为dt35-b15251,其具有一发射端和一个接收端,发射端会照射接收端,接收端输出预设的信号,当物料较多时,接收端被遮挡,此时物料量较大,接收端输出物料多信号。
36.在使用过程中,物料会进入料斗11,并抵达出料口处,在出料口处被绞龙轴4所推动并输出,绞龙轴4由驱动电机5所驱动,其中绞龙轴4在出料管7内架设,随着绞龙轴4回转物料会被输送出,并进入负压管8被抽取输送走,其中物料高度由对射传感器6进行检测,当物料较多时,驱动电机5带动绞龙轴4在常规速度上提速,使其加速回转,物料被加速排出,当物料较少时,驱动电机5带动绞龙轴4按照常规速度回转,物料被排出。
37.以上上述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1