一种柔性透气材料的抓取装置的制作方法
1.本实用新型涉及一种柔性透气材料的抓取装置,主要用于柔性透气材料的取放料。
背景技术:
2.现有柔性透气材料的抓取装置常以气源为动力方式工作,即利用气缸推动针盘扎取物料。例如,公告号为cn 214003316 u的中国实用新型专利公开了“一种t型针式吸盘”,其通过安装在t型结构上的气缸推动针座和不锈钢针,来实现布料的夹取。
3.此种通过气缸推动针座和不锈钢针实现布料的夹取的方式存在着缺陷,例如:由于一些特殊的透气性材料受轻微撕扯就会撕裂,在抓取时就必须避免对材料产生撕扯,因而采用现有的针式吸盘进行抓取,存在物料撕裂的问题。又比如,对于比较薄且比较强韧的透气性材料(如棉布、麻布等),要求同时实现多工位的上下料,采用现有的针式吸盘只能实现取一次放一次的方式,效率低下。
4.另外,对于比较蓬松的物料,因物料蓬松导致其虚位比较大,因而在抓取这类物料的时候往往需要在每次抓取前先压一下再实行抓取,使用现有的针式吸盘只能通过增加力反馈传感器或者高度感应等感应装置,同时机械结构和控制系统也会变复杂,即需要增加可控制行程的机械结构,需要感应器和针式吸盘升降机构联动,通过控制系统调度。
5.同时,现有技术还存在以下缺陷:(1)通过气缸推动两组不锈钢针,通过手动调节调节旋钮来改变气缸的限位,从而改变活塞块停止的位置,达到控制不锈钢针伸出长度的目的,该技术无法通过软件控制调整不锈钢针伸出的长度;(2)通过气缸推动两组不锈钢针,由于气缸的速度很难精准控制,所以该技术很难控制不锈钢针伸出的速度;(3)通过气缸推动两组不锈钢针,由于气缸只有起始位和结束位两个位置,无法在中间位置停止,所以该技术无法由程序控制不锈钢针伸出的长度,既不锈钢针只有伸出和收回两个位置,无中间位置;(4)通过一个气缸推动两组不锈钢针,两组不锈钢针只能同步伸出或者收回,无法分开控制;(5)无接触式感知感应器,即无法感知装置是否接触到物料;(6)无接触式感知感应器,即无法感知物料是否抓取成功。
技术实现要素:
6.为了克服现有技术中对物料的撕扯、效率低下、外部结构复杂等缺陷,本实用新型的目的在于提供一种柔性透气材料的抓取装置,能够有效地解决了至少部分上述问题。
7.为实现上述目的,本实用新型采用如下技术方案:一种柔性透气材料的抓取装置,包括第一针座、第二针座、第一电动伸缩驱动机构和第二电动伸缩驱动机构,所述第一针座上安装有至少一组以第一倾斜角度倾斜的第一穿刺针,所述第二针座上安装有至少一组以第二倾斜角度倾斜的第二穿刺针,所述第一穿刺针与第二穿刺针交错分布且倾斜的方向相反,所述第一电动伸缩驱动机构能够驱动第一针座及其上的第一穿刺针沿第一倾斜角度方向运动,所述第二电动伸缩驱动机构能够驱动第二针座及其上的第二穿刺针沿第二倾斜角
度方向运动。
8.优选地,所述第一电动伸缩驱动机构通过第一驱动连杆驱动第一针座,所述第二电动伸缩驱动机构通过第二驱动连杆驱动第二针座。
9.优选地,所述第一电动伸缩驱动机构和第二电动伸缩驱动机构均电性连接至控制器。
10.优选地,所述第一电动伸缩驱动机构和第二电动伸缩驱动机构均为直线电机。
11.优选地,所述柔性透气材料的抓取装置还包括外壳,所述第一针座和第二针座安装在外壳的内部。
12.优选地,所述外壳的底面设置有若干个用于感知物料的接触式感知感应器。
13.优选地,所述接触式感知感应器的数量为四个,分别设置在外壳的底面四角处。
14.优选地,所述第一针座和第二针座为互补结构,二者共同构成一个平面。
15.优选地,所述第一针座呈梳齿形结构,所述第一针座包括若干根等间隔平行分布的第一梳齿,所述第一梳齿上布设有若干根以第一倾斜角度倾斜的所述第一穿刺针。
16.优选地,所述第二针座呈梳齿形结构,所述第二针座包括若干根等间隔平行分布的第二梳齿,所述第二梳齿上布设有若干根以第二倾斜角度倾斜的所述第二穿刺针,所述第二梳齿与第一梳齿交错分布。
17.优选地,所述第一穿刺针和第二穿刺针为不锈钢针。
18.与现有技术相比,本实用新型具有以下有益效果:该抓取装置采用两个电动伸缩驱动机构分别控制至少一组倾斜方向相反的穿刺针,夹取操作可以多样化,适用情景更多;通过交错布置的第一穿刺针和第二穿刺针扎入产品内部,并由按照一定的倾斜角度交错排列的穿刺针产生向上的分力,对产品进行夹取,适用于夹取一些外形不规则的产品,夹取软性材料的产品,夹取比较薄、透气的材料,夹取大面积的产品。另外,还可在外壳底面增加若干个接触式感知感应器,来感知抓取装置是否接触到物料、是否抓取成功。
附图说明
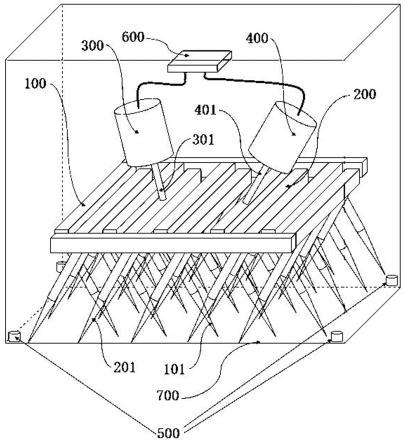
19.图1为本实用新型实施例的整体结构示意图。
20.图2为本实用新型实施例中的第一针座的一种结构示意图。
21.图3为本实用新型实施例中的第二针座的一种结构示意图。
22.图4为本实用新型实施例中的第一针座和第二针座的互补示意图。
23.图5为本实用新型实施例中的第一针座的另一种结构示意图。
24.图6为本实用新型实施例中的第二针座的另一种结构示意图。
25.图7为本实用新型实施例中的第一穿刺针和第二穿刺针的交错交叉示意图。
26.附图标记:100、第一针座;101、第一穿刺针;200、第二针座;201、第二穿刺针;300、第一电动伸缩驱动机构;301、第一驱动连杆;400、第二电动伸缩驱动机构;401、第二驱动连杆;500、接触式感知感应器;600、控制器;700、外壳。
具体实施方式
27.为了让本实用新型的上述特征和优点更明显易懂,下面特举实施例,并配合附图,作详细说明如下。
28.实施例一:如图1~3所示,一种柔性透气材料的抓取装置,包括第一针座100、第二针座200、第一电动伸缩驱动机构300和第二电动伸缩驱动机构400,所述第一针座100上安装有至少一组以第一倾斜角度θ1倾斜的第一穿刺针101,所述第二针座200上安装有至少一组以第二倾斜角度θ2倾斜的第二穿刺针201,所述第一穿刺针101与第二穿刺针201交错分布且倾斜的方向相反(形成交叉),所述第一电动伸缩驱动机构300能够驱动第一针座100及其上的第一穿刺针101沿第一倾斜角度θ1(如30度、45度、60度等)方向运动,所述第二电动伸缩驱动机构400能够驱动第二针座200及其上的第二穿刺针201沿第二倾斜角度θ2(如150度、135度、120度等)方向运动。其中,所述第一倾斜角度θ1与所述第二倾斜角度θ2互补,即二者之和为180度,例如第一倾斜角度θ1为30度,则第二倾斜角度θ2为150度。
29.在本实施例中,所述第一电动伸缩驱动机构300可以通过第一驱动连杆301驱动第一针座100,所述第二电动伸缩驱动机构400可以通过第二驱动连杆401驱动第二针座200。为了方便实现自动化控制,所述第一电动伸缩驱动机构300和第二电动伸缩驱动机构400均电性连接至控制器600。其中,所述第一电动伸缩驱动机构300和第二电动伸缩驱动机构400均优选但不局限于为直线电机(也称线性电机),所述直线电机能够感知自身伸缩位置、调节伸缩长度、调节伸缩速度、多进程,具体型号不限。所述控制器600能够分别通过第一电动伸缩驱动机构300和第二电动伸缩驱动机构400对应控制第一穿刺针101和第二穿刺针201的伸出长度及伸出速度,其具体类型和具体型号不限,优选但不局限于为单片机或plc,例如stc系列的51单片机和西门子plc。
30.本实施例的工作原理如下:第一电动伸缩驱动机构300驱动第一针座100和安装在第一针座100上的第一穿刺针101沿第一倾斜角度θ1 方向运动;由第二电动伸缩驱动机构400驱动第二针座200和安装在第二针座200的第二穿刺针201沿第二倾斜角度θ2 方向运动;通过若干组交错布置的第一穿刺针101和第二穿刺针201,扎入产品内部,并由按照一定的倾斜角度交错排列的穿刺针产生向上的分力,对产品进行夹取,适用于夹取一些外形不规则的产品,如夹取软性材料的产品,夹取比较薄、透气的材料,夹取大面积的产品。所述控制器600能够控制第一电动伸缩驱动机构300和第二电动伸缩驱动机构400在任意位置停止,进而控制第一穿刺针101和第二穿刺针201伸出任意长度后停止,例如可根据物料特性,设置第一穿刺针101和/或第二穿刺针201先刺透物料后,再收回一小段距离,在保证物料抓取的同时防止物料粘连;所述控制器600是分别控制第一电动伸缩驱动机构300和第二电动伸缩驱动机构400的,进而分开控制第一穿刺针101和第二穿刺针201伸出和收回,例如可根据物料特性,由控制器600控制第一穿刺针101伸出穿透物料后,再由控制器600控制第二穿刺针201伸出穿透物料,避免两组穿刺针同时穿透物料对物料产生撕扯;可以在特殊情况下只使用第一穿刺针101或第二穿刺针201(即其中一个方向的穿刺针),例如对于特殊情况下垂直放置的物料,且不能撕扯并尽量减少刺孔的情况下,即可由控制器600控制驱动其中一个电动伸缩驱动机构,使针尖朝上的一组穿刺针伸出,即可抓取物料;所述控制器600能够控制第一电动伸缩驱动机构300和第二电动伸缩驱动机构400实现多进程,例如可根据物料特性,设置第一穿刺针101和第二穿刺针201伸出长度,一次抓取多层物料,每次收回一片物料的厚度,实现取一次放多次的功能,提高效率。
31.实施例二:如图1~3所示,一种柔性透气材料的抓取装置,其与实施例一的主要区别在于:所述柔性透气材料的抓取装置还包括外壳700,所述第一针座100和第二针座200安
装在外壳700的内部。
32.在本实施例中,所述外壳700的底面设置有若干个用于感知物料的接触式感知感应器500(或称接触觉传感器),例如接触式感知感应器500的数量优选但不局限于为四个,分别设置在外壳700的底面四角处。其中,所述接触式感知感应器500能够感知抓取装置是否接触到物料以及接触情况,能够在抓取物料之后感知物料是否抓取成功,其具体类型和具体型号不限,如气压式、超导式、磁感式、电容式、光电式等类型的接触传感器。
33.实施例三:如图4和图7所示,一种柔性透气材料的抓取装置,其与实施例一或实施例二的主要区别在于:所述第一针座100和第二针座200为互补结构,二者共同构成一个平面。
34.在本实施例中,如图2和图5所示,所述第一针座100优选但不局限于呈梳齿形结构,所述第一针座100包括若干根等间隔平行分布的第一梳齿,所述第一梳齿上布设有若干根以第一倾斜角度θ1倾斜的所述第一穿刺针101;如图3和图6所示,所述第二针座200优选但不局限于呈梳齿形结构,所述第二针座200包括若干根等间隔平行分布的第二梳齿,所述第二梳齿上布设有若干根以第二倾斜角度θ2倾斜的所述第二穿刺针201,所述第二梳齿与第一梳齿交错分布。其中,所述第一穿刺针101和第二穿刺针201优选但不局限于为不锈钢针,使用寿命长。
35.以上所述,仅为本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,任何熟悉本领域的技术人员但凡未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做任何简单的修改、均等变化与修饰,皆应属本实用新型的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1