一种纸箱抓取装置的制作方法
1.本实用新型属于包装运输技术领域,尤其涉及一种纸箱抓取装置。
背景技术:
2.在很多领域的机械化生产中,机械手已经得到了广泛的应用。机械手替代人工的重复性操作,极大地提高了生产效率并降低了人工生产成本。
3.通用发电机组在组装过程中,大部分配件均采用纸箱包装,例如发电机、排气管罩等零部件,由于各个零部件的形状不同,导致各个零部件所采用的包装箱外形尺寸也不同,因此,现有的包装箱难以适用各类通用箱体的搬运。
4.中国实用新型专利cn201910798444.7公开了一种带缓冲装置的吸盘夹具,包括安装底板、导向装置、弹力恢复装置、以及用于吸附产品的吸盘夹具;导向装置安装在安装底板上,吸盘夹具安装在导向装置上且可沿其滑行;吸盘夹具的两边分别安装有用于接受外力的冲击并将冲击力抵消的缓冲装置,缓冲装置一端分别安装在吸盘夹具的两边且接受外力的冲击力并将冲击力抵消,其另一端安装在安装底板上;弹力恢复装置安装在缓冲装置上。或者类似镊子捏合的方式来自动抓取,吸盘吸附要求物件整体性比较完整,比如细长纸箱之类,表面不好吸附,吸附以后底部受力过大会造成底部裂开,影响生产效率。
5.因此,如何提高纸箱抓取效率,并且要保障包装的完整性,成为本领域技术人员亟待解决的问题。
技术实现要素:
6.本实用新型的目的在于提供一种纸箱抓取装置,解决了现有吊架结构抓取效率低、不能保障包装完整性等问题。为了达到上述目的,本实用新型的技术方案如下:
7.一种纸箱抓取装置,包括第一支撑架和第二支撑架,所述第一支撑架和第二支架之间还设置有第一方向滑柱,所述第一支撑架末端设置有平衡装置;所述第一方向滑柱上滑动设置有滑动箱,滑动箱与平衡装置通过拉索连接,所述滑动箱上设置有第二方向滑柱,第二方向滑柱末端设置有连接臂;连接臂上设置有吊架;
8.所述吊架包括连接杆、第一支臂、第二支臂、第一连接臂和第二连接臂,其中第一支臂的顶端和第二支臂顶端均与连接杆上部铰接;所述第一连接臂包括第一连接上臂和第一连接下臂,第二连接臂包括第二连接上臂和第二连接下臂;第一支臂底端与第一连接上臂铰接,第二支臂底端与第二连接上臂铰接;还包括第一转轴,第一连接臂和第二连接臂均与第一转轴转动连接,且第一转轴与连接杆滑动连接;
9.第一连接下臂转动设置有第一夹板,第二连接下臂转动设置有第二夹板。
10.进一步地,还包括防撞板,其中第一夹板和/或第二夹板均连接有防撞板。
11.进一步地,所述第一夹板与第一连接下臂之间还设置有调节单元。
12.进一步地,所述连接杆上设置有定位单元。
13.进一步地,所述连接杆末端设置有限位装置。
14.本技术在具体使用时,第一支撑架和第二支撑架作为整体的支撑机构,第一支撑架和第二支架之间通过转动设置有第一方向滑柱,例如第一方向滑柱可选择丝杠,或者选择光杠,两端通过轴承分别与第一支撑架和第二支撑架连接,第一方向滑柱上滑动设置有滑动箱,滑动箱上设置有第二方向滑柱,第二方向滑柱末端通过固定或可拆卸的方式设置有连接臂;连接臂上通过可拆卸的方式,例如螺纹连接或其它现有连接方式可拆卸的设置有吊架。在实际运用时,依靠第一支撑架和第二支撑架作为本技术基础结构,通过设置的第一方向滑柱,能够让吊架沿着第一方向滑动;通过设置的第二方向滑柱,能够让吊架沿着第一方向滑动,以此第一方向滑柱和第二方向滑柱配合能够拓展吊架的运动轨迹,扩大本技术结构的使用范围。
15.在本技术中,吊架包括连接杆、第一支臂、第二支臂、第一连接臂和第二连接臂,其中第一支臂和第二支臂均可选择型钢,例如选择条状结构的钢条,连接杆也可选择条状结构的钢条;第一支臂的顶端和第二支臂顶端均与连接杆上部铰接;所述第一连接臂和第二连接臂可选择呈l形状的型钢,其中第一连接臂包括第一连接上臂和第一连接下臂,第二连接臂包括第二连接上臂和第二连接下臂;第一支臂底端与第一连接上臂铰接,第二支臂底端与第二连接上臂铰接;还包括第一转轴,第一连接臂和第二连接臂均与第一转轴转动连接;在本技术中连接杆上设置有开孔或者滑槽,第一转轴与连接杆设置的开孔或者滑槽相配合,构成滑动连接;在第一连接下臂转动设置有第一夹板,第二连接下臂转动设置有第二夹板。
16.当需要夹取纸箱材料时,吊架沿着第一方向滑柱下滑至预定位置处,此时吊架下移,第一连接臂和第二连接臂向外扩展,第一夹板和第二夹板的相对位置扩大,便于夹取纸箱或相关物品;当吊架上移,这时第一连接臂和第二连接臂向内收紧,第一夹板和第二夹板的相对位置缩小,便于抓取或移动纸箱;通过本技术结构中采用的吊架作为抓取机构,以及第一方向滑柱、第二方向滑柱等作为移动机构,以及第一支撑架和第二支撑架等作为支撑机构,整体结构简单;并且利用吊架的上升和下降即可实现抓取功能,提升了吊架的抓取效率;同时,本技术中采用第一夹板和第二夹板合围的方式抓取纸箱或相关物品,增大了抓取机构与纸箱的接触面积,能够更大限度的保证纸箱或相关物品包装的完整性。
附图说明
17.图1为本实用新型第一视角示意图;
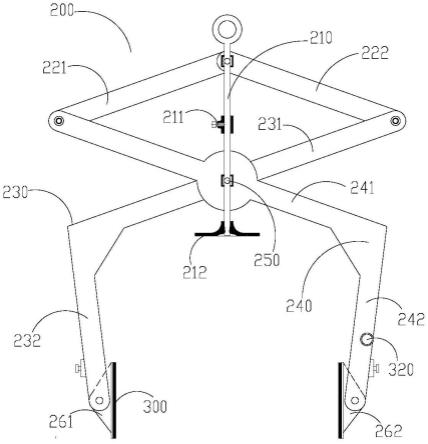
18.图2为本实用新型吊架第一视角示意图;
19.图3为本实用新型吊架第二视角示意图;
20.图4为本实用新型吊架局部放大示意图;
21.图5为本实用新型吊架局部放大示意图;
22.说明书附图中的附图标记包括:110第一支撑架、111平衡装置、120第二支撑架、130第一方向滑柱、140滑动箱、150第二方向滑柱、160第三连接臂、
23.200吊架、210连接杆、211定位单元、212限位装置、221第一支臂、222第二支臂、230第一连接臂、231第一连接上臂、232第一连接下臂、240第二连接臂、241第二连接上臂、242第二连接下臂、250第一转轴、261第一夹板、262第二夹板、
24.263滑架、300防撞板、311第一连接螺钉、312第一连接螺母、313第二连接螺母、314
工字架、320操作手柄。
具体实施方式
25.将参照附图详细描述根据本实用新型的各个实施例。这里,需要注意的是,在附图中,将相同的附图标记赋予基本上具有相同或类似结构和功能的组成部分,并且将省略关于它们的重复描述。术语“第一”或“第二”及其变体的描述仅仅是为了区分各部件,并不限制本实用新型的范围。
26.本说明书的附图为示意图,辅助说明本实用新型的构思,示意性地表示各部分的形状及其相互关系。下面,参照附图,详细描述根据本实用新型的优选实施方式。
27.本实施例提供了一种纸箱抓取装置200,包括第一支撑架110和第二支撑架120,所述第一支撑架110和第二支架之间还设置有第一方向滑柱130,所述第一支撑架110末端设置有平衡装置111;所述第一方向滑柱130上滑动设置有滑动箱140,滑动箱140与平衡装置111通过拉索连接,所述滑动箱140上设置有第二方向滑柱150,第二方向滑柱150末端设置有第三连接臂160;第三连接臂160上设置有吊架200;
28.所述吊架200包括连接杆210、第一支臂、第二支臂222、第一连接臂230和第二连接臂240,其中第一支臂的顶端和第二支臂222顶端均与连接杆210上部铰接;所述第一连接臂230包括第一连接上臂231和第一连接下臂232,第二连接臂240包括第二连接上臂241和第二连接下臂242;第一支臂底端与第一连接上臂231铰接,第二支臂222底端与第二连接上臂241铰接;还包括第一转轴250,第一连接臂230和第二连接臂240均与第一转轴250转动连接,且第一转轴250与连接杆210滑动连接;第一连接下臂232转动设置有第一夹板261,第二连接下臂242转动设置有第二夹板262。
29.如图1所示,在本实施例中,第一支撑架110和第二支撑架120可选择型钢,包括工字钢或者其它型钢固定在地面或墙面或其他基础上,作为整个结构的支撑机构,第一支撑架110和第二支撑架120间隔设置,在两者之间通过转动设置第一方向滑柱130,第一方向滑柱130可选择丝杠,或者选择光杠,两端通过轴承分别与第一支撑架110和第二支撑架120连接;还可选择动力机构,例如选择电动机与第一方向滑柱130连接,驱动第一方向滑柱130旋转,第一方向滑柱130上滑动设置有滑动箱140,进而带动滑动箱140沿着第一方向滑柱130往复移动;例如可选择丝杠和丝杠螺母连接结构,滑动箱140内设置有丝杠螺母与丝杠进行配合,当丝杠转动时,带动丝杠螺母往复移动,及带动滑动箱140往复移动。在本技术其他实施例中,还可以选择其他现有结构,致使滑动箱140沿着第一方向滑柱130往复移动。为了提高本技术结构的稳定性,本技术在第一支撑架110末端设置有平衡装置111,滑动箱140与平衡装置111通过拉索连接,在本实施例中,平衡装置111选择现有技术中常用的结构,例如可选择市售产品平衡器,或者选择平衡器ph5-9;通过设置平衡装置111,能够提升本技术结构在运行过程中的稳定性。
30.滑动箱140上设置有第二方向滑柱150,滑动箱140与第二方向滑柱150相配合的结构和滑动箱140与第一方向柱相配合的结构一致;为了提高滑动箱140与第二方向滑柱150相对移动的稳定性,在本技术中还可选择两个并列设置的第二方向滑柱150,均与滑动箱140配合连接,如此提高二者相对移动的稳定性,也提高了本技术抓取纸箱的稳定性,以及抓取纸箱在移动过程中的稳定性。
31.第二方向滑柱150末端通过固定或可拆卸的方式设置有第三连接臂160;第三连接臂160上通过可拆卸的方式,例如螺纹连接或其它现有连接方式可拆卸的设置有吊架200。在实际运用时,依靠第一支撑架110和第二支撑架120作为本技术基础结构,通过设置的第一方向滑柱130,能够让吊架200沿着第一方向滑动;通过设置的第二方向滑柱150,能够让吊架200沿着第一方向滑动,以此第一方向滑柱130和第二方向滑柱150配合能够拓展吊架200的运动轨迹,扩大本技术结构的使用范围。
32.如图2所示,在本技术中,吊架200包括连接杆210、第一支臂、第二支臂222、第一连接臂230和第二连接臂240,其中第一支臂和第二支臂222均可选择型钢,例如选择条状结构的钢条,连接杆210也可选择条状结构的钢条;第一支臂的顶端和第二支臂222顶端均与连接杆210上部铰接;所述第一连接臂230和第二连接臂240可选择呈l形状的型钢,其中第一连接臂230包括第一连接上臂231和第一连接下臂232,第二连接臂240包括第二连接上臂241和第二连接下臂242;第一支臂底端与第一连接上臂231铰接,第二支臂222底端与第二连接上臂241铰接;还包括第一转轴250,第一连接臂230和第二连接臂240均与第一转轴250转动连接;在本技术中连接杆210上设置有开孔或者滑槽,第一转轴250与连接杆210设置的开孔或者滑槽相配合,构成滑动连接;在第一连接下臂232转动设置有第一夹板261,第二连接下臂242转动设置有第二夹板262。
33.当需要夹取纸箱材料时,吊架200沿着第一方向滑柱130下滑至预定位置处,此时吊架200下移,第一连接臂230和第二连接臂240向外扩展,第一夹板261和第二夹板262的相对位置扩大,便于夹取纸箱或相关物品;当吊架200上移,这时第一连接臂230和第二连接臂240向内收紧,第一夹板261和第二夹板262的相对位置缩小,便于抓取或移动纸箱;通过本技术结构中采用的吊架200作为抓取机构,以及第一方向滑柱130、第二方向滑柱150等作为移动机构,以及第一支撑架110和第二支撑架120等作为支撑机构,整体结构简单;并且利用吊架200的上升和下降即可实现抓取功能,提升了吊架200的抓取效率;同时,本技术中采用第一夹板261和第二夹板262合围的方式抓取纸箱或相关物品,增大了抓取机构与纸箱的接触面积,能够更大限度的保证纸箱或相关物品包装的完整性。
34.进一步地,在本技术的其他实施例中,还包括防撞板300,其中第一夹板261和/或第二夹板262均连接有防撞板300;实际使用时,防撞板300可选择8mm厚聚胺脂板,其外形和第一夹板261相匹配,防撞板300可通过螺栓连接或镶嵌连接的方式与第一夹板261或第二夹板262连接。通过设置防撞板300,尤其是采用聚胺脂板,更加降低了在抓取纸箱或相关物品时对纸箱的损害,同时采用还能耐磨损,提升本技术机构的使用寿命。
35.进一步地,所述第一夹板261与第一连接下臂232之间还设置有调节单元。如图4所示,所示调节单元的一种方案包括设置在第一夹板261后部的滑架263,所述滑架263与第一夹板261一体化设置,滑架263上设置有滑孔,通过螺栓穿过滑孔将第一夹板261与第一连接下臂232固定连接,调整螺栓在滑孔内的相对位置,即可进行调整第一夹板261和第一连接下臂232的相对位置,可适用于不同纸箱或不同物品的抓取;为了进一步提高第一夹板261和第一连接下臂232之间的稳定性,在本技术中可通过在第一夹板261上一体设置两个以上的滑架263,通过多个滑架263分别与第一连接下臂232连接,进一步提升本技术结构的稳定性。进一步地,所述调节单元的另一种方案还可包括第一连接螺钉311、第一连接螺母312和第二连接螺母313,所述第一夹板261后部设置有第一连接孔,为了便于连接,可在第一夹板
261后固定设置有工字架314,如图4所示,在工字架314上设置有连接通孔,其中第一连接螺钉311与连接通孔相匹配,实际使用时,将第一连接螺母312和第二连接螺母313设置于工字架314两侧,均与第一连接螺钉311连接,通过调整第一连接螺钉311与连接通孔的相对位置,进而调整第一夹板261与第一连接下臂232之间的相对位置,如此也可适用于不同纸箱或不同物品的抓取。在实际使用中,第一夹板261与第一连接下臂232之间的调节单元可包括上述第一种方案,也可包括上述第二方案,还可选择上述两种方案的组合。
36.进一步地,所述连接杆210上设置有定位单元211。如图2所示,其中定位单元211设置在第一转轴250上方,通过设置定位单元211,可限制第一转轴250的移动幅度,一方面可避免第一连接臂230和第二连接臂240因转动幅度过大而出现吊架200各运转部件卡滞现象;另一方面,可提升本技术结构在运转过程的稳定性。在本技术中,所述定位单元211包括定位套管和定位螺钉,通过定位螺钉和定位套管的配合,构成在连接杆210上的定位单元211,整体结构简单,并且成本低。
37.进一步地,所述连接杆210末端设置有限位装置212。如图2所示,限位装置212可选择限位板焊接至连接杆210的末端,用于限制第一转轴250向下的移动边界,整体结构简单,并且成本低。
38.进一步地,所述第二连接臂240设置有操作手柄320。如图2、图3所示,在本技术中,为了便于操作者操作本技术结构,可选择在第二连接臂240上一体设置有操作手柄320,在具体实施中,可选择φ25管握把焊接连接第二连接臂240上,方便操作者使用本技术结构。
39.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1