一种芯片分选装置的制作方法
1.本实用新型应用于半导体芯片封装的技术领域,特别涉及一种芯片分选装置。
背景技术:
2.在半导体芯片生产中,需要对生产完成的芯片进行测试,测试设备将芯片按测试结果进行分级,芯片生产工厂需要将测试后的芯片按分级进行挑选和排片。半导体芯片分选是半导体芯片生产过程中的核心生产工艺,工作过程主要是在芯片测试完成后,根据芯片生产工厂的存储、运输需要以及后段封装生产设备的上料要求,需要将芯片分选转移至适当规格晶圆铁圈或静电托盘中。对应的芯片分选流程分别有芯片从晶圆铁圈转移到晶圆铁圈;芯片从晶圆铁圈转移到静电托盘;芯片从静电托盘转移到晶圆铁圈;芯片从静电托盘转移到静电托盘。现有的半导体芯片分选设备均采用xyz三轴移载台并搭载一组取放吸嘴,搭配对应的晶圆铁圈自动上下料机构或静电托盘自动上下料机构组成。采用点到点重复取放作业方式,取放吸嘴每次吸取物料的位置均相同,每次放置物料的位置相同,配合晶圆铁圈或静电托盘上下料组件的移载,完成芯片的分选作业。由于取放头只能两点作业,故设备只能支持单种分选方式,即只能在以下四种作业方式中的一种进行作业:芯片从晶圆铁圈转移到晶圆铁圈;芯片从晶圆铁圈转移到静电托盘;芯片从静电托盘转移到晶圆铁圈;芯片从静电托盘转移到静电托盘。设备生产方式固定,分选方式过于单一,每次切换生产流程则需要更换设备,导致工作效率低下。中国专利cn201871496u公开了芯片的晶粒分选装置,其将承载的芯片供选料臂选取晶粒,将挑选出的晶粒移送至工作区的薄膜上,实现了芯片从晶圆铁圈转移到晶圆铁圈,难以满足不同方式的上下料,因此有必要提供一种结构紧凑、能够快速切换生产流程的芯片分选装置。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种结构紧凑、能够快速切换生产流程的芯片分选装置。
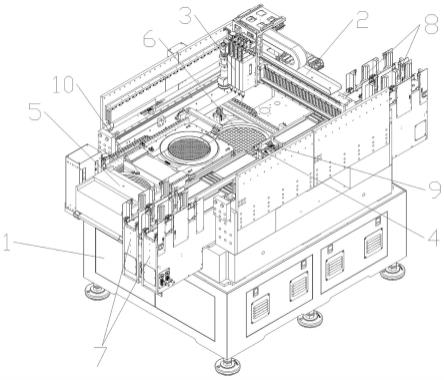
4.本实用新型所采用的技术方案是:本实用新型包括设置在机架上的龙门组件、吸嘴组件、视觉对位组件、晶圆铁圈供料模组、晶圆铁圈放料模组、托盘供料模组以及托盘放料模组,所述吸嘴组件连接在所述龙门组件的动作端,所述视觉对位组件、所述晶圆铁圈供料模组、所述晶圆铁圈放料模组、所述托盘供料模组以及所述托盘放料模组设置在所述龙门组件的内侧下方,所述吸嘴组件通过吸取芯片在各个模组中进行切换上下料,所述视觉对位组件的上方设置有用于装载芯片的承载台。
5.由上述方案和图1可见,所述吸嘴组件的一侧设置有定位相机,所述定位相机位于所述龙门组件的动作端,跟随着所述吸嘴组件一并移动,所述定位相机主要用于扫描定位芯片产品在晶圆铁圈或托盘上的上料和下料位置,保证所述吸嘴组件能够精准吸附或放置芯片产品,所述芯片分选装置包括三轴移动机构,架空于所述晶圆铁圈供料模组、所述晶圆铁圈放料模组、所述托盘供料模组以及所述托盘放料模组的上方,驱动所述吸嘴组件进行
吸附或放置芯片产品;所述视觉对位组件用于检测所述承载台上的芯片,根据上一道工序测试机的分析结果,进行分级、挑选和排片,从而判断芯片流到具体的位置,所述晶圆铁圈供料模组、所述晶圆铁圈放料模组分别对所述晶圆铁圈进行芯片的供料和放料,所述托盘供料模组和所述托盘放料模组分别对所述托盘进行芯片的供料和放料,所述芯片分选装置可完成四种作业方式:从晶圆铁圈转移到晶圆铁圈;从晶圆铁圈转移到托盘;从托盘转移到晶圆铁圈;从托盘转移到托盘。所述芯片分选装置的功能较为全面,切换生产流程简单。相比市面上仅能单一进行分选,采用点到点重复取放作业方式,取放吸嘴每次吸取物料的位置均相同,每次放置物料的位置相同,难以满足多样化分选,所述芯片分选装置能够分选多种芯片,满足测试的多样化。
6.一个优选方案是,所述晶圆铁圈供料模组包括第一升降台、第一夹爪、定位台以及脱膜组件,所述脱膜组件设置在所述定位台的下方,所述第一夹爪设置在所述定位台的一侧,所述第一升降台设置在所述定位台的进料端,所述第一夹爪在所述定位台和所述第一升降台之间进行上下料。
7.由上述方案可见,所述晶圆铁圈供料模组用于输送芯片提篮,所述芯片提篮能够装载多层晶圆铁圈,所述晶圆铁圈上通过附着的蓝膜排列着若干芯片,所述芯片提篮由人工装好所述晶圆铁圈后,放置到所述第一升降台上,所述第一夹爪将所述晶圆铁圈从所述芯片提篮中夹取后,移载到所述定位台上,也可将所述定位台上作业完的所述晶圆铁圈夹取移载到所述第一升降台上,进行所述晶圆铁圈的上下料和换片作业,所述脱膜组件对所述蓝膜上承载的芯片做脱膜处理,以便于所述吸嘴组件吸取芯片。
8.一个优选方案是,所述晶圆铁圈放料模组包括第二升降台、第二夹爪、支撑架以及顶升组件,所述顶升组件设置在所述支撑架的内侧,所述第二夹爪在所述支撑架的一侧,所述第二升降台设置在所述支撑架的进料端,所述第二夹爪在所述支撑架和所述第二升降台之间进行上下料。
9.由上述方案可见,所述晶圆铁圈放料模组同样地输送所述芯片提篮,所述芯片提篮由人工装好所述晶圆铁圈后放置到所述第二升降台上,所述第二夹爪将所述晶圆铁圈从所述芯片提篮中夹取后,移载到所述支撑架上,所述顶升组件驱动向上顶升,将所述晶圆铁圈顶起至作业高度并对所述晶圆铁圈夹持定位。当所述晶圆铁圈满载工作完成后,所述顶升组件驱动向下,将所述晶圆铁圈落到所述支撑架上,由所述第二夹爪将所述晶圆铁圈夹紧送至所述芯片提篮中。
10.一个优选方案是,所述托盘供料模组和所述托盘放料模组均包括上料料框组件、收料料框组件以及输送线,所述上料料框组件与所述收料料框组件并列设置,所述上料料框组件设置在所述输送线的进料端,所述输送线设置在所述上料料框组件与所述收料料框组件的内侧,所述托盘供料模组中所述输送线的出料端与所述托盘放料模组中所述输送线的入料端为对接配合。
11.由上述方案可见,人工将待作业的托盘放置到所述上料料框组件中,由组件自动拆盘落盘到所述输送线上,所述输送线移载所述托盘到作业位置,等待芯片的装载,作业完成后,所述输送线移载所述托盘到所述收料料框组件,由组件自动将作业完的所述托盘顶升至所述收料料框组件中。
12.一个优选方案是,所述龙门组件包括大理石底座、x轴直线模组以及两组y轴直线
模组,两组所述y轴直线模组平行设置在所述大理石底座上,所述x轴直线模组的两端分别与两组所述y轴直线模组的动作端连接,所述吸嘴组件包括依次传动连接的z轴直线模组、r轴旋转模组以及若干吸嘴,所述z轴直线模组设置在所述x轴直线模组的动作端。
13.由上述方案可见,所述大理石底座作为所述龙门组件的支撑体,所述x轴直线模组、所述y轴直线模组以及所述z轴直线模组相互配合,构成所述三轴移动机构,同时所述r轴旋转模组能够带动若干所述吸嘴进行旋转,满足芯片的多角度取放,另外,若干所述吸嘴与外部真空源连接,能够吸附若干芯片,进行不间断上下料,减少了所述三轴移动机构的行程,有利于提高所述芯片分选装置的工作效率。
14.一个优选方案是,所述视觉对位组件包括光源、镜筒、工业相机以及调节座,所述工业相机固定在所述调节座上,所述工业相机的扫描口竖直向上设置,所述镜筒和所述光源依次设置在所述工业相机扫描口的上端。
15.由上述方案可见,所述工业相机与外部测试机连接,同时与所述芯片分选装置的控制模组电信号配合,进而控制所述三轴移动机构移动的行程,所述镜筒作为所述工业相机的放目镜或成像设备,所述光源为所述工业相机提供稳定的光源。
16.一个优选方案是,所述第一升降台、所述上料料框组件以及所述收料料框组件的顶部设置有到位传感器,所述到位传感器与所述芯片分选装置的控制模组电信号配合。
17.由上述方案可见,所述到位传感器用于检测所述晶圆铁圈或所述托盘是否满料或者上料发生偏位,进而控制所述晶圆铁圈或所述托盘继续移动。
附图说明
18.图1是本实用新型的立体结构示意图;
19.图2是所述龙门组件的立体结构示意图;
20.图3是所述晶圆铁圈供料模组的立体结构示意图;
21.图4是所述晶圆铁圈放料模组的立体结构示意图;
22.图5是所述托盘供料模组和所述托盘放料模组的立体结构示意图;
23.图6是所述视觉对位组件的立体结构示意图。
具体实施方式
24.如图1至图6所示,在本实施例中,本实用新型包括设置在机架1上的龙门组件2、吸嘴组件3、视觉对位组件4、晶圆铁圈供料模组5、晶圆铁圈放料模组6、托盘供料模组7以及托盘放料模组8,所述吸嘴组件3连接在所述龙门组件2的动作端,所述视觉对位组件4、所述晶圆铁圈供料模组5、所述晶圆铁圈放料模组6、所述托盘供料模组7以及所述托盘放料模组8设置在所述龙门组件2的内侧下方,所述吸嘴组件3通过吸取芯片在各个模组中进行切换上下料,所述视觉对位组件4的上方设置有用于装载芯片的承载台9。
25.在本实施例中,所述晶圆铁圈供料模组5包括第一升降台51、第一夹爪52、定位台53以及脱膜组件54,所述脱膜组件54设置在所述定位台53的下方,所述第一夹爪52设置在所述定位台53的一侧,所述第一升降台51设置在所述定位台53的进料端,所述第一夹爪52在所述定位台53和所述第一升降台51之间进行上下料。
26.在本实施例中,所述晶圆铁圈放料模组6包括第二升降台61、第二夹爪62、支撑架
63以及顶升组件64,所述顶升组件64设置在所述支撑架63的内侧,所述第二夹爪62在所述支撑架63的一侧,所述第二升降台61设置在所述支撑架63的进料端,所述第二夹爪62在所述支撑架63和所述第二升降台61之间进行上下料。
27.在本实施例中,所述托盘供料模组7和所述托盘放料模组8均包括上料料框组件71、收料料框组件72以及输送线73,所述上料料框组件71与所述收料料框组件72并列设置,所述上料料框组件71设置在所述输送线73的进料端,所述输送线73设置在所述上料料框组件71与所述收料料框组件72的内侧,所述托盘供料模组7中所述输送线73的出料端与所述托盘放料模组8中所述输送线73的入料端为对接配合。
28.在本实施例中,所述龙门组件2包括大理石底座21、x轴直线模组22以及两组y轴直线模组23,两组所述y轴直线模组23平行设置在所述大理石底座21上,所述x轴直线模组22的两端分别与两组所述y轴直线模组23的动作端连接,所述吸嘴组件3包括依次传动连接的z轴直线模组、r轴旋转模组以及若干吸嘴,所述z轴直线模组设置在所述x轴直线模组22的动作端。
29.在本实施例中,所述视觉对位组件4包括光源41、镜筒42、工业相机43以及调节座44,所述工业相机43固定在所述调节座44上,所述工业相机43的扫描口竖直向上设置,所述镜筒42和所述光源41依次设置在所述工业相机43扫描口的上端。
30.在本实施例中,所述第一升降台51、所述上料料框组件71以及所述收料料框组件72的顶部设置有到位传感器10,所述到位传感器10与所述芯片分选装置的控制模组电信号配合。
31.本实用新型的工作原理:
32.所述晶圆铁圈供料模组、所述托盘供料模组分别对所述晶圆铁圈、所述托盘进行芯片的供料,所述定位相机扫描定位芯片产品在所述晶圆铁圈或所述托盘上的上料位置,所述吸嘴组件精准吸附芯片产品,所述龙门组件驱动芯片产品移栽到所述承载台上,所述视觉对位组件用于检测所述承载台上的芯片产品,根据上一道工序测试机的分析结果,进行分级、挑选和排片,从而判断芯片产品流到具体的位置,所述龙门组件根据命令将芯片产品移栽到所述晶圆铁圈放料模组或所述托盘放料模组中,所述定位相机扫描定位芯片产品在所述晶圆铁圈或所述托盘上的下料位置后,所述吸嘴组件进行放料动作,所述芯片分选装置可完成四种作业方式:从晶圆铁圈转移到晶圆铁圈;从晶圆铁圈转移到托盘;从托盘转移到晶圆铁圈;从托盘转移到托盘。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1