多穴位自动摆盘装置的制作方法
1.本实用新型涉及物料传送技术领域,特别涉及一种多穴位自动摆盘装置。
背景技术:
2.在目前机械化生产线上高度机械化自动化背景下,自动转运、摆盘、装箱过程都大幅实现机械化电子化,但是对于应用于终端消费品所需的金属部件和精密电子元器件等,因为精度较高且质地怕磕碰等问题,大部分需要人工轻拿轻放进行摆盘。所以在现有的生产过程中,只能半机械化半人工来完成生产流程,效率受到制约,产能相应地受到瓶颈环节制约。
3.由于电子消费品终端零件的用量大,使用人工对的零件进行摆盘作业,需要花费大量的人力资源,且重复的摆盘动作会使从业人员产生生理疲劳,造成劳动强度大的局面。
技术实现要素:
4.为了解决上述问题,本实用新型提供以下技术方案:
5.本实用新型提供多穴位自动摆盘装置,所述装置包括上料装置、下料装置和抓取装置,所述抓取装置包括第一抓取装置和第二抓取装置,所述第一抓取装置与第二抓取装置连接,所述上料装置上放置空的泡壳,所述第二抓取装置将空的泡壳夹取堆叠移动到所述下料装置上,并通过第一抓取装置将一个或多个产品装载在下料装置上的泡壳内。
6.所述第一抓取装置将产品从流水线上或放置产品的放置台上夹取到成品缓存台,所述第二抓取装置可以一个一个的抓取产品,也可以一次夹取多个产品。
7.进一步的,所述第一抓取装置包括固定板,所述固定板上设有至少一个通孔,所述通孔内设有第一吸盘,所述第一吸盘用于吸附产品。
8.进一步的,所述第二抓取装置设置在所述固定板上,所述第二抓取装置包括转接板和第一驱动件,所述转接板与所述第一驱动件连接,并在第一驱动件的驱动下移动;所述转接板的两端部设有第二吸盘,所述第二吸盘用于吸附泡壳。
9.优选的,所述抓取装置包括连接板和立板,所述立板与所述连接板连接,所述固定板设置在所述立板的下方,所述立板呈l形,方便与所述连接板和固定板连接。当所述固定板上设有多个第一吸盘时,为了保持平衡,所述第一吸盘分别设于所述立板的两侧。
10.优选的,所述第二抓取装置设置在所述固定板的板沿处的中部,所述第一驱动件设于所述转接板的中部,防止在吸附泡壳的时候发生侧翻。
11.进一步的,所述下料装置设有下料放置空间,所述下料放置空间包括第一下料放置空间和第二下料放置空间,所述第一下料放置空间和所述第二下料放置空间之间设有阻挡装置,所述阻挡装置用于阻挡所述上料装置或所述下料装置上的泡壳随其传送方向继续移动。
12.进一步的,所述第一下料放置空间处和所述第二下料放置空间处均设有底位光电传感器,当底位光电传感器感应到所述泡壳的存在,则触发相应下料放置空间处的阻挡装
置伸展。
13.进一步的,所述第一下料放置空间处还设有高位光电传感器,当高位光电传感器感应到满载的泡壳,则触发下料放置空间内的阻挡装置收缩。
14.优选的,所述上料装置设有放置泡壳的上料放置空间,所述上料放置空间包括第一上料放置空间和第二上料放置空间;所述上料放置空间内堆叠放置空泡壳,堆叠的高度可以和摆盘装箱的高度一样。
15.所述第一上料放置空间和所述第二上料放置空间之间设有所述阻挡装置,所述第一上料放置空间处设有第一光电传感器,所述第二上料放置空间处设有第二光电传感器,当所述第一光电传感器感应不到所述泡壳,则触发所述阻挡装置收缩,当所述第一光电传感器和所述第二光电传感器均感应到所述泡壳的存在,则触发所述阻挡装置伸展。
16.进一步的,所述阻挡装置包括阻挡电机和阻挡板,所述阻挡电机和阻挡板连接,所述阻挡板随所述阻挡电机的伸缩杆伸缩。
17.进一步的,所述抓取装置为三轴机械手,可以实现x、y、z方向的移动,所述三轴机械手上设有传感器和感应片,用于精确定位。
18.进一步的,所述下料装置的两侧均设有侧挡板,防止在传动带的传送过程中发生偏离以及防止泡壳放置错位。
19.优选的,所述上料装置的两端均设有挡板,和下料装置传送方向一致的下料装置一端也设有挡板,所述第一下料放置空间和所述第一上料放置空间的两侧均设有定位柱,用于泡壳的定位,保证了抓取机构放置泡壳的准确度。
20.优选的,上料装置和所述下料装置平行设置,所述上料装置和所述下料装置的传送反向相反。
21.进一步的,所述第一吸盘和所述第二吸盘为真空吸盘,所述真空吸盘与真空发生器配合使用,通过真空发生器的喷管高速喷射压缩空气控制对所述产品和接泡壳的吸附与释放。
22.优选的,通过控制真空发生器喷射压缩空气量来控制第一吸盘工作,第一吸盘可以一次吸附一个产品,也可以一次吸附多个产品。
23.本实用新型具有以下有益效果:
24.(1)本实用新型通过在抓取装置上设有第一抓取装置和第二抓取装置,分别对泡壳和产品进行抓取,通过真空发生器与第一抓取装置的配合使用,可以实现一次抓取一个产品或一次抓取多个产品;
25.(2)本实用新型通过在下料装置设有第一下料放置空间和第二下料放置空间,并在第一下料放置空间内设有底位光电传感器和高位光电传感器,并通过底位光电传感器感应到所述泡壳的存在,则触发相应下料放置空间处的阻挡装置伸展,阻挡泡壳随下料装置的传送方向移动,实现对泡壳自动化堆叠,方便后续的装箱处理;
26.(3)本实用新型通过在下料装置两侧均设有侧挡板,下料装置传送方向一致的下料装置一端也设有挡板,利用简单的结构实现对泡壳的固定以及防止泡壳的错位放置。
附图说明
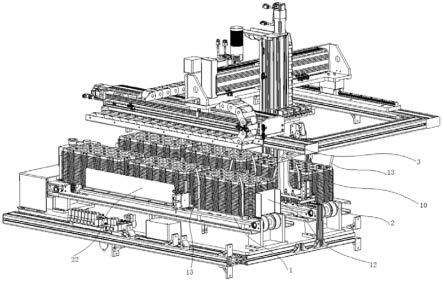
27.图1是本实用新型的整体结构示意图。
28.图2是本实用新型的抓取装置的抓取局部示意图。
29.图3是本实用新型的下料装置示意图。
30.图4是本实用新型的上料装置示意图。
31.图5是本实用新型的阻挡装置示意图。
具体实施方式
32.以下结合附图对本实用新型的具体实施方式做详细描述,应当指出的是,实施例只是对实用新型的具体阐述,不应视为对实用新型的限定,实施例的目的是为了让本领域技术人员更好地理解和再现本实用新型的技术方案,本实用新型的保护范围仍应当以权利要求书所限定的范围为准。
33.如图1所示,本实用新型提供多穴位自动摆盘装置,所述装置包括上料装置 1、下料装置2和抓取装置3,所述抓取装置3包括第一抓取装置31和第二抓取装置32,所述第一抓取装置31与第二抓取装置32连接,所述上料装置1上放置空的泡壳10,所述第二抓取装置32将空的泡壳10夹取堆叠移动到所述下料装置2上,并通过第一抓取装置31将一个或多个产品装载在下料装置上的泡壳内。
34.所述第一抓取装置31将产品从流水线上或放置产品的放置台上夹取到成品缓存台,所述第二抓取装置32可以一个一个的抓取产品,也可以一次夹取多个产品。
35.如图2所示,所述第一抓取装置31包括固定板311,所述固定板311上设有至少一个通孔3110,所述通孔3110内设有第一吸盘312,所述第一吸盘312 用于吸附产品。
36.在一些优选方案中,所述第二抓取装置32设置在所述固定板311上,所述第二抓取装置32包括转接板321和第一驱动件322,所述转接板321与所述第一驱动件322连接,并在第一驱动件322的驱动下移动;所述转接板321的两端部设有第二吸盘323,所述第二吸盘323用于吸附泡壳10。
37.优选的,所述抓取装置3包括连接板33和立板34,所述立板34与所述连接板33连接,所述固定板311设置在所述立板34的下方,所述立板34呈l形,方便与所述连接板33和固定板311连接。当所述固定板311上设有多个第一吸盘312时,为了保持平衡,所述第一吸盘312分别设于所述立板34的两侧。
38.优选的,所述第二抓取装置32设置在所述固定板311的板沿处的中部,所述第一驱动件322设于所述转接板321的中部,防止在吸附泡壳的时候发生侧翻。
39.在一些优选方案中,所述下料装置2设有下料放置空间21,所述下料放置空间21包括第一下料放置空间211和第二下料放置空间212,所述第一下料放置空间211和所述第二下料放置空间212之间设有阻挡装置4,所述阻挡装置4 用于阻挡所述上料装置1或所述下料装置2上的泡壳随其传送方向继续移动。
40.如图3所示,所述第一下料放置空间211处和所述第二下料放置空间212处均设有底位光电传感器5,当底位光电传感器5感应到所述泡壳10的存在,则触发相应下料放置空间21处的阻挡装置4伸展。
41.在一些优选方案中,所述第一下料放置空间211处还设有高位光电传感器6,当高位光电传感器6感应到满载的泡壳10,则触发下料放置空间21内的阻挡装置4收缩。
42.如图4所示,所述上料装置1设有放置泡壳的上料放置空间11,所述上料放置空间
11包括第一上料放置空间111和第二上料放置空间112;所述上料放置空间11内堆叠放置空泡壳,堆叠的高度可以和摆盘装箱的高度一样。
43.所述第一上料放置空间111和所述第二上料放置空间112之间设有所述阻挡装置4,所述第一上料放置空间111处设有第一光电传感器7,所述第二上料放置空间112处设有第二光电传感器8,当所述第一光电传感器7感应不到所述泡壳,则触发所述阻挡装置4收缩,当所述第一光电传感器7和所述第二光电传感器8均感应到所述泡壳的存在,则触发所述阻挡装置4伸展。
44.如图5所示,所述阻挡装置4包括阻挡电机41和阻挡板42,所述阻挡电机 41和阻挡板42连接,所述阻挡板42随所述阻挡电机41的伸缩杆伸缩。
45.在一些优选方案中,所述抓取装置3为三轴机械手,可以实现x、y、z方向的移动,所述三轴机械手上设有传感器和感应片,用于精确定位。
46.在一些优选方案中,所述下料装置2的两侧均设有侧挡板22,防止传送过程中发生偏离以及防止泡壳放置错位。
47.所述上料装置1的两侧均设有侧挡板22。
48.优选的,所述上料装置1的两端均设有挡板12,和下料装置2传送方向一致的下料装置一端也设有挡板12,所述第一下料放置空间211和所述第一上料放置空间111的两侧均设有定位柱13,用于泡壳的定位,保证了抓取机构3放置泡壳的准确度。
49.优选的,上料装置1和所述下料装置2平行设置,所述上料装置1和所述下料装置2的传送反向相反。
50.在一些优选方案中,所述第一吸盘312和所述第二吸盘323为真空吸盘,所述真空吸盘与真空发生器配合使用,通过真空发生器的喷管高速喷射压缩空气控制对所述产品和接泡壳的吸附与释放。
51.优选的,通过控制真空发生器喷射压缩空气量来控制第一吸盘312工作,第一吸盘312可以一次吸附一个产品,也可以一次吸附多个产品。
52.尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1