自动生产线安全装置的制作方法
1.本技术涉及自动生产线技术领域,具体涉及一种自动生产线安全装置。
背景技术:
2.喇叭是一种电子元件,用作电视、手机和扬声器等的发声单元。随着对生产效率和生产品质要求的提高,自动化生产线被更多喇叭生产企业所应用。
3.目前的一种喇叭自动生产线,采用在自动生产线上运动的滑块小车来承载产品到各个加工工位,通过控制滑块小车的运行距离来确保滑块小车的位置正确性。
4.然而,随着自动生产线的运行,各项机械误差逐渐累积,难以保证自动生产线持续、稳定、高精度的运行。长时间运行会使自动生产线上运行的滑块小车的位置产生较大偏差,难以精确定位,就会导致自动生产线的一些机构容易与滑块小车相互碰撞而造成损失,致使自动生产线停摆。
技术实现要素:
5.本技术的主要目的是,提供一种自动生产线安全装置。
6.本技术采用的技术方案为:一种自动生产线安全装置,应用于自动生产线,自动生产线上运行多个滑块小车,所述装置包括:原点感应器、辅助感应器、磁性感应器和顶升机构;其中,所述原点感应器,设置在初始位置,用于感应预设的0号滑块小车是否回到原点;所述辅助感应器,设置在辅助位置,用于感应到有滑块小车抵达辅助位置时,发出启动信号控制所述顶升机构工作;所述顶升机构,设置在工作位置,用于在接收到所述启动信号后开始工作,对抵达工作位置的滑块小车进行定位;磁性感应器,设置在工作位置,用于感应到所述顶升机构升起时,发出禁止信号控制自动生产线停止运行。
7.在一些可选的实施方式中,辅助位置、工作位置和初始位置沿着自动生产线依次设置,其中,辅助位置与工作位置的间距实质相等于工作位置和初始位置的间距,且实质相等于相邻的两个滑块小车的间距。
8.在一些可选的实施方式中,所述装置还包括设置于滑块小车上的定位导套;所述顶升机构包括:顶升感应器、顶升定位销和顶升气缸;所述顶升感应器用于检测是否有滑块小车抵达工作位置;所述顶升气缸用于在有滑块小车抵达工作位置后,将所述顶升定位销顶起,插入滑块小车的定位导套中,实现对滑块小车的精确定位。
9.在一些可选的实施方式中,所述顶升机构还包括:转轴,用于以磁性吸附方式连接滑块小车上的转台,所述转台用于承载待加工的产品;电机,用于带动所述转轴旋转,从而带动所述转台旋转。
10.如上所述,为了解决自动生产线在运行过程中误差增大,滑块小车难以精确定位的技术问题,本技术提出了一种自动生产线安全装置。通过采用上述技术方案,本技术取得的技术效果包括但不限于:
11.(1)通过在初始位置设置感应器,来检测特定的滑动小车,可以控制滑动小车定时
回原点,从而消除累计误差,确保自动生产线持续、稳定、高精度的运行。
12.(2)通过在辅助位置设置感应器,配合顶升机构对滑块小车进行定位,以此可以实现对滑块小车的精确定位,可以防止因滑块小车没到位而出现的撞机,避免自动生产线的一些机构与滑块小车碰撞而造成损失,避免因此导致自动生产线停摆。
附图说明
13.为了更清楚地说明本技术实施例技术方案,下面将对实施例和现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
14.图1是根据本技术一个实施例的自动生产线的局部俯视结构示意图;
15.图2是根据本技术一个实施例的自动生产线安全装置的正视图;
16.图3是根据本技术一个实施例的自动生产线安全装置的侧视图;
17.图4是根据本技术一个实施例的滑块小车的俯视结构示意图;
18.图5是根据本技术一个实施例的滑块小车和顶升机构的剖视结构示意图。
具体实施方式
19.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
20.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”等是用于区别不同的对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
21.下面通过具体实施例,进行详细的说明。
22.参考图1,图1是根据本技术一个实施例的自动生产线的俯视结构示意图。如图1所示,本技术的自动生产线包括:传动机构、轨道以及滑块小车10。其中,轨道为环形轨道,滑块小车10能够在传动机构的带动下在环形轨道上运动。
23.这里,传动机构包括但不限于是链条传动机构。以链条传动机构为例,包括:设置于自动生产线前端(即机架头部)的主传动轮21,设置于生产线后端(即机架尾部)的从传动轮(图中未示出),链接在主传动轮21和从传动轮上的传动链条(图中未示出),以及,设置在自动生产线前端、用来驱动主传动轮21的传动电机(图中未示出)。可选的,传动电机可采用大功率伺服电机。在传动电机的驱动下,主传动轮21带动链条运动。可选的,传动机构还包括用来控制传动电机的控制器。
24.这里,环形轨道沿着链条布置。可选的,链条位于外侧,环形轨道位于链条的内侧。环形轨道可包括两条直线导轨31以及两条u形导轨32,两条u形导轨32分别设置在前端的主
传动轮21处以及后端的从传动轮处,将设置于两侧的两条直线导轨31连接起来,构成环形轨道。
25.这里,滑块小车10可滑动的设置在环形轨道中,并可通过固定块连接于链条。当链条在主传动轮21的带动下运动时,通过固定块带动滑块小车10在环形轨道上运行。这里,由链条带动,由环形轨道限位,滑块小车10可以稳定的运行。在安装时,可以先装好直线导轨31,然后将至少一个滑块小车10装载到直线导轨31上,然后再安装u形导轨32,并且,将滑块小车10跟连接于链条的固定块33连接起来。如此,将链条的移动转化为滑块小车10的运动。随着主动轮21的转动,滑块小车10就可以在环形轨道上循环往复的运行。
26.这里,整个自动生产线可以沿环形轨道布置多个工作位置(简称工位),多个工位可以分别布置有加工设备。滑块小车10可以设置有多个,在环形轨道上运行并根据需要停在需要进行加工的工位。滑块小车10停下后,可以直接跟所在工位的加工设备对接,由加工设备对滑块小车10上承载的待加工的产品进行操作。
27.为了确保自动生产线持续、稳定、高精度的运行,以及,为了精确定位滑块小车10,避免滑块小车撞机,避免自动生产线停摆,本技术一个实施例提供一种自动生产线安全装置。
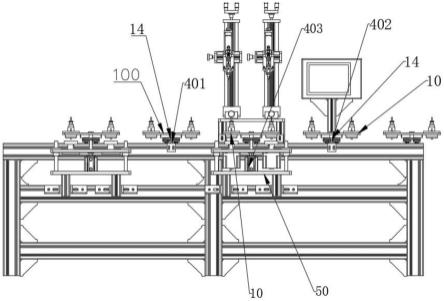
28.参考图2和图3,本技术实施例的自动生产线安全装置,应用于自动生产线,包括:原点感应器41、辅助感应器42、磁性感应器43和顶升机构50。其中,原点感应器41和辅助感应器42可以采用光电传感器。
29.原点感应器41,可通过固定钣金设置在初始位置,用于感应滑块小车10中的预设的0号滑块小车100是否回到原点;
30.辅助感应器42,可通过固定钣金设置在辅助位置,用于感应到有滑块小车10抵达辅助位置时,发出启动信号控制顶升机构50工作;
31.顶升机构50,设置在工作位置,用于在接收到启动信号后开始工作,对抵达工作位置的滑块小车10进行定位;
32.磁性感应器43,设置在工作位置,用于感应到顶升机构50升起时,发出禁止信号控制自动生产线停止运行。
33.如上所述,本技术实施例中,可以在初始位置设置原点感应器41,检测预设的0号滑块小车100,在设定的时机确定0号滑块小车100回到原点(初始位置),来消除累积误差。示例性的,每次工艺流程结束后,通过控制系统让0号滑块小车100回到原点,即初始位置,来消除在生产过程中产生的累积误差。其中,0号滑块小车100以预先指定的一个滑块小车。
34.可选的,在0号滑块小车100下安装传感器销钉(或称为撞针)。当0号滑块小车100回到原点时,撞针完全遮住原点感应器的光线,原点感应器41发出信号,确定0号滑块小车100处于初始位置。可选的,其他滑块小车也都可以安装撞针,任何一辆小车都可以充当0号小车,但系统默认以初始设定的0号小车为开始。
35.可选的,初始位置设置在自动生产线的一个工作位置的下游,与工作位置的间距实质相等于两个相邻的滑块小车10的间距。
36.可选的,在上述工作位置的上游还设置一个辅助位置,该辅助位置与该工作位置的间距实质相等于该工作位置与初始位置的间距,且实质相等于两个相邻的滑块小车10的间距。
37.即,辅助位置、工作位置和初始位置沿着自动生产线依次设置,彼此的间距实质相等,且实质相等于相邻的两个滑块小车10的间距。
38.当0号小车在初始位置时,会有一个滑块小车在工作位置,称为1号滑块小车;也会有一个滑块小车在辅助位置,称为2号滑块小车。
39.辅助位置的辅助感应器42,主要用来确定是否有滑块小车10是否到达对应的辅助位置,若有,用来发出启动信号,使顶升机构50工作,对抵达工作位置的滑块小车10进行定位。
40.需要强调的是:
41.原点感应器41,只在0号滑块小车100回到初始位置时起作用,用于确定系统回到了初始位置;
42.辅助感应器42,用于发出启动信号,启动其他部分如顶升机构50进行工作,可以起到了防撞机的功能,当辅助感应器42没有信号,意味着滑块小车10没到位,则顶升机构50不工作,以避免撞机。
43.磁性感应器43,可以安装在顶升机构50,用来感应顶升机构50的位置,当顶升机构50升起时,发送禁止信号使得自动生产线被禁止运动,但顶升机构50下降时,自动生产线被允许运动,避免因为机械卡死或人为升起顶升机构而造成撞机情况。
44.参考图4和图5,图5是根据本技术一个实施例的滑块小车的俯视结构示意图,图5是根据本技术一个实施例的滑块小车和顶升机构的剖视结构示意图。
45.如图4和图5所示,本技术一个实施例的滑块小车10包括水平移动板11和滑块12,滑块12安装在自动生产线的轨道上、能够在轨道上运动,水平移动板11固定在滑块12上,水平移动板11上设置有定位导套13和传感器销钉14,传感器销钉14可用于被感应器检测到。
46.这里,滑块12可通过固定块33与自动生产线的链条连接起来,从而跟随链条的运动而在轨道上运行。
47.在一些可选的实时方式中,水平移动板11上还设置有转台15和固定底座16,转台15用于承载待加工的产品并且可相对于水平移动板11旋转,固定底座16用于固定加工治具。示例性的,产品例如为喇叭,加工治具例如包括磁规。磁规是喇叭生产中用来定位磁铁等组件的一种治具。
48.如图5所示,本技术一个实施例中,顶升机构50可包括:顶升感应器(图中未示出)、顶升定位销51和顶升气缸52。
49.其中,顶升感应器,用于在感应到滑块小车10上传感器销钉14时,确认有滑块小车10抵达工作位置;
50.顶升气缸52,用于在有滑块小车10停在工作位置后,将顶升定位销51顶起,使顶升定位销51插入滑块小车10的定位导套13中,实现对滑块小车10的精确定位;以及,操作完成后,可以带动顶升定位销51从滑块小车10的定位导套13中退出。
51.在一些可选的实时方式中,顶升机构还包括:
52.转轴53,用于磁性吸附方式连接滑块小车10上的的转台15,转台15用于承载待加工的产品;
53.电机54,用于带动转轴53旋转,从而带动转台15旋转。
54.在一些可选的实时方式中,工作位置处还设置有位于滑块小车10上方的点胶机,
点胶机用于对放置在滑块小车10的转台15上的产品(例如喇叭)进行点胶操作。
55.在一些可选的实时方式中,顶升机构还包括:用来固定电机54的电机固定板55,用来固定顶升气缸52的气缸固定板56以及至少两根滑动轴57,气缸固定板56通过至少两根滑动轴57连接至上方的电机固定板55。滑动轴56的作用是用来起辅助顶升气缸52带动电机54向上移动,保证了电机固定块55不会左右晃动,让整块顶升部分保持水平。示例性的,滑动轴56可以在顶升气缸52的左右各设置一根。
56.以上,为了解决自动生产线在运行过程中误差增大,滑块小车难以精确定位的技术问题,本技术提出了一种自动生产线安全装置。通过采用上述技术方案,本技术取得的技术效果包括但不限于:
57.(1)通过在初始位置设置感应器,来检测特定的滑动小车,可以控制滑动小车定时回原点,从而消除累计误差,确保自动生产线持续、稳定、高精度的运行。
58.(2)通过在辅助位置设置感应器,配合顶升机构对滑块小车进行定位,以此可以实现对滑块小车的精确定位,可以防止因滑块小车没到位而出现的撞机,避免自动生产线的一些机构与滑块小车碰撞而造成损失,避免因此导致自动生产线停摆。
59.以上,通过具体实施例对本技术的技术方案进行了详细说明。在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述的部分,可以参见其它实施例的相关描述。
60.应当理解,上述各实施例仅用以说明本技术的技术方案,而非对其限制。本领域的普通技术人员,可以对上述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1