一种智能拖体收放系统的制作方法
1.本实用新型涉及一种拖体收放装置,尤其涉及一种智能拖体收放系统。
背景技术:
2.伴随着海洋科学和海洋工程的不断发展,声呐技术作为探测海底地貌、结构、障碍物等的重要工具被广泛应用于国防以及民用领域。拖曳声纳大多装备在水面舰艇上,按照其基阵结构特点,分为拖体声呐和拖线阵声呐。拖体声呐因其主动工作方式以及深度可调的特点应用最为广泛,同时随着海洋探测的需求不断增加,以拖体声呐为基础,相继演变出各种形式的水下拖体,除搭载声呐设备外,还可搭载其他各种检测仪器,满足不同探测需求。拖体释放若单纯采用人工或人工辅助,既增加劳动强度,同时人员安全也存在隐患,难以完成复杂海况下的安全释放回收。此外随着无人技术的不断发展,对于各种拖体的可靠释放回收成为一项关键技术。
3.水下拖体的释放及回收,目前普遍采用收放绞车加a型架或单臂吊的方式进行收放,此种方式较为原始简单,大多需要人工进行干预,存在安全隐患。还可采用收放绞车加专用收放架的方式,解决了a型架与绞车间的配合问题,进一步提高了安全性,但是仍然存在占用空间大,结构复杂等缺点。如以下专利:
4.发明专利cn111362164a,涉及一种用于布放回收深海拖曳式声呐系统的装置,采用绞车加单臂吊的形式进行拖体收放,尽管结构简单,各部分相对独立,易于操作。但装置占用了较大甲板空间,空间利用率不高,需要人工辅助操作,不适于中小型舰艇,且无法实现无人作业。
5.发明专利cn109866883b,涉及一种艇用拖曳声呐的布放回收装置,采用绞车加门架的形式进行拖体收放,整体占用空间较大,装置作业过程中需要人工操作,拖体回收过程中还易发生姿态偏移,造成无法回收,需要人工辅助摆正拖体姿态,不能满足无人要求。
6.发明专利cn110104509a,公开了一种整体平推式变幅伸缩收放装置,采用整体平推方式将装置整体包含拖体置于水面上方,利用变幅机构旋转下放拖体。由于结构复杂,整体重量大,其仅适用于大型拖体,因此只能安装于大型舰船使用。同时,装置整体进行平推运动,会造成重心偏移,影响船体的运行稳定及高速运行。此外该装置仍需人员操作,对于拖体偏移需要人工观察后进行回转摆正,无法实现完全无人操作。
7.发明专利cn102180242b,公开了一种平移折叠式收放装置,利用多级折叠臂组实现了拖体的释放回收,虽然整体空间紧凑,但是仍然采用整体出舱的形式,依然会造成重心偏移的情况,影响船体运行。另外,该装置采用全液压驱动,尽管液压驱动适应大负载且运行平稳,但其需单独选配液压站以及液压控制系统,存在泄漏污染问题。
8.发明专利cn111319723a,涉及一种水下拖曳体自主收放装置,其包含多级滑动架以及摆动架,采用滑道式的收放方式对拖体进行收放。该方案虽然能够实现无人操作,但拖体回收过程要求拖体平稳,无径向旋转,如拖体发生旋转,拖体无法完全收入接收口,易造成拖体损坏,由此其难以适应复杂的海况情况。此外,装置的纵向长度较大,占用较多空间,
且采用全液压驱动的装置,还需单独选配液压站,增大了使用成本。
9.实用新型专利cn212503753,公开一种用于拖体收放的门架装置,利用驱动缸将门形架连同拖体部分旋转至船尾外侧水面上,进而进行拖体的释放回收,虽然收放过程方便快捷,但对于门架结构强度要求较高,装置收回后高度较高,不适于小型艇的安装使用,而且装置整体安装于船尾外侧,释放过程中会造成船体扰动。
技术实现要素:
10.为解决上述现有技术中存在的问题,本实用新型提供一种智能拖体收放系统,其为可装载在中小型舰艇上的全自动智能拖体收放系统,能够适应各种不同复杂海况,安全可靠地释放回收声呐设备。
11.为实现上述目的,本实用新型的具体技术方案如下:
12.一种智能拖体收放系统,其特征在于,所述拖体收放系统包括连杆收放装置、自动绞车装置、拖体柔性收放装置;
13.两个所述连杆收放装置对称设置在所述自动绞车装置两侧;两个所述连杆收放装置的伸出端对称铰接安装在所述拖体柔性收放装置顶端的两侧,与所述拖体柔性收放装置组成连杆收放门架结构;所述连杆收放装置包括电动推杆,所述电动推杆与所述连杆收放装置相连,所述电动推杆伸缩驱动所述连杆收放装置向上或向下旋转;
14.所述拖体柔性收放装置包括线缆滑轮、楔形定位夹、伞形拖体回收罩;所述线缆滑轮位于所述伞形拖体回收罩上方;所述伞形拖体回收罩中间设有导向槽;所述自动绞车装置上缠绕的缆绳绕过所述线缆滑轮穿过所述导向槽与所述伞形拖体回收罩下方的拖体相连;所述自动绞车装置自动卷收缆绳,所述楔形定位夹安装在所述缆绳的伸出端,所述楔形定位夹上部夹紧所述缆绳;所述楔形定位夹底部为楔形端;所述楔形定位夹通过所述楔形端以预定方向穿过所述导向槽,带动所述拖体以预定回收方向回收。
15.进一步地,所述伞形拖体回收罩底部设有柔性垫,通过所述柔性垫所述伞形拖体回收罩柔性定位所述拖体。
16.进一步地,所述连杆收放装置为双层四连杆结构,还包括固定外连杆、固定内连杆、过度连杆、固定连杆、推杆铰支座、连杆铰支座;
17.所述固定外连杆、所述过度连杆、所述固定连杆和所述连杆铰支座共同组成第一层四连杆结构;所述固定外连杆、所述固定内连杆、所述连杆铰支座和所述拖体柔性收放装置共同组成第二层四连杆结构;
18.所述电动推杆的固定端铰接安装在所述推杆铰支座上,所述固定外连杆、所述固定内连杆和所述固定连杆的底端分别铰接设置在所述连杆铰支座上,所述固定外连杆和所述固定内连杆的顶端分别与所述拖体柔性收放装置铰接相连,所述电动推杆的伸缩端与所述过度连杆和所述固定连杆的顶端铰接相连,所述过度连杆的底端与所述固定外连杆铰接相连。
19.进一步地,所述拖体柔性收放装置还包括铰接短轴、方形固定盘、铰接长轴;两个所述方形固定盘对称安装在所述拖体柔性收放装置支架顶端;所述铰接短轴的两端分别穿过两个所述方形固定盘上部靠近舰艇的一端,与所述固定内连杆铰接;所述铰接长轴的两端分别穿过两个所述方形固定盘下部远离所述舰艇的一端,与所述固定外连杆铰接。
20.进一步地,所述楔形定位夹由两个楔形定位板拼装组成,两个所述楔形定位板上部夹紧所述缆绳。
21.进一步地,所述伞形拖体回收罩由两个对称结构的对接体组成,两个所述对接体对称安装在所述拖体柔性收放装置支架底端两侧;两个所述对接体之间留有预定间距的间隙,所述间隙为所述导向槽。
22.进一步地,所述自动绞车装置包括卷筒、卷扬电机、自动排缆组件;所述卷扬电机位于所述卷筒一侧,所述卷扬电机与所述自动排缆组件相连,所述自动排缆组件位于所述卷筒前方,用于引导所述缆绳自动排列在所述卷筒上。
23.进一步地,所述自动排缆组件为丝杠螺母副,所述丝杠螺母副包括丝杠、导缆轮;所述导缆轮螺纹连接在所述丝杠上,所述缆绳绕在所述导缆轮上,所述丝杠设置在所述卷筒前方,所述丝杠的两端分别安装行程开关;所述卷扬电机驱动所述丝杠旋转带动所述导缆轮沿所述丝杠在水平方向上左右移动。
24.进一步地,所述自动绞车装置上设有张力检测传感器,用于实时监测所述缆绳张力变化情况。
25.进一步地,所述电动推杆上安装有力矩检测传感器,用于检测所述连杆收放装置的力矩变化。
26.本实用新型的有益效果:
27.本实用新型采用全电动设备,无需外加液压站等附属设备,结构简单,占用空间小,其具备自动释放、自动放缆、自动深度控制、自动姿态调整、自动回收、自动排缆、自动上架等自主控制能力,可远程控制和自动控制,完全实现无人操作,适用于中小型有人/无人舰艇使用。
28.本实用新型通过连杆收放装置实现折叠收放,减少了空间占用,使其可安装于各种类型中小型有人/无人舰艇,而采用双层四连杆结构,不仅能保证稳定收放,还减少了电动推杆的行程,进而可降低电动推杆的成本。
29.本实用新型在楔形定位夹和导向槽的共同作用下,可保证拖体以预定方向进入回收仓,可保证无人情况下拖体能够顺利回收对接,通过对卷扬电机、电动推杆等的控制,实现缆绳收放变矩变速控制,连杆收放门架结构变矩变速控制,可对海浪作用进行补偿,实现高海况下稳定、可靠地收放拖体。而且伞形拖体回收罩底部柔性垫的设计,还可实现拖体在伞形拖体回收罩内的柔性定位,
30.此外,本实用新型通过自动绞车装置的自动排缆技术避免了缆绳出现缠绕不均、乱绳、咬绳、缠绕过程相互挤压等不利情况。本实用新型通过检测张力变化,获取拖体深度,再结合船速及流速控制缆绳收放,实现拖体按一定深度稳定运行。
附图说明
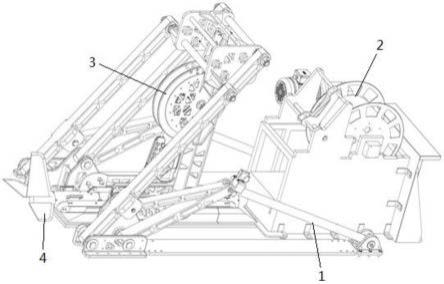
31.图1为本实用新型智能拖体收放系统收纳状态示意图;
32.图2为本实用新型智能拖体收放系统的结构图;
33.图3为本实用新型智能拖体收放系统工作状态示意图;
34.图4为本实用新型中拖体柔性收放装置示意图。
35.其中:1-连杆收放装置、1.1-固定外连杆、1.2-固定内连杆、1.3-过度连杆、1.4-固
定连杆、1.5-电动推杆、1.6-推杆铰支座、1.7-力矩检测传感器、1.8-连杆铰支座、2-自动绞车装置、2.1-卷筒、2.2-卷扬电机、2.3-自动排缆组件、3-拖体柔性收放装置、3.1-铰接短轴、3.2-方形固定盘、3.3-线缆滑轮、3.4-楔形定位夹、3.5-伞形拖体回收罩、3.6-铰接长轴、4-拖体、4.1-拖体安放座、4.2-拖体到位检测开关。
具体实施方式
36.为了使本领域的技术人员更好地理解本技术的技术方案,以下将结合附图及实施例对本实用新型做进一步详细说明。
37.本技术文件中的上、下、左、右、前和后等方位用语是基于附图所示的位置关系而建立的。附图不同,则相应的位置关系也有可能随之发生变化,故不能以此理解为对保护范围的限定。
38.本实用新型中,术语“安装”、“相连”、“相接”、“连接”、“固定”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,也可以是一体地连接,也可以是机械连接,也可以是电连接或可以相互通信,也可以是直接连接,也可以是通过中间媒介间接连接,可以是两个元器件内部的联通,也可以是两个元器件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
39.本实施例记载了一种智能拖体收放系统,该拖体收放系统安装于各种类型中小型有人/无人舰艇,采用折叠收放的形式进行拖体收放,可有效减少空间占用。
40.如图1所示,该拖体收放系统主要由连杆收放装置1、自动绞车装置2、拖体柔性收放装置3组成。
41.两个连杆收放装置1对称设置在自动绞车装置2两侧,两个连杆收放装置1的伸出端对称安装在拖体柔性收放装置3顶端的两侧,两个连杆收放装置1与拖体柔性收放装置3组成连杆收放门架结构。拖体4置于拖体柔性收放装置3下方。自动绞车装置2伸出的缆绳经拖体柔性收放装置3改变方向后与拖体4相连,在连杆收放门架结构伸缩推拉拖体柔性收放装置3和自动绞车装置2卷收缆绳的作用下,回收或释放拖体4。
42.连杆收放门架结构为拖体4折叠出仓入仓的主要结构,本实施例中连杆收放装置1通过双层四连杆结构实现拖体4的整体释放收纳。
43.如图2所示,连杆收放装置1包括固定外连杆1.1、固定内连杆1.2、过度连杆1.3、固定连杆1.4、电动推杆1.5、推杆铰支座1.6、力矩检测传感器1.7、连杆铰支座1.8。
44.固定外连杆1.1、过度连杆1.3、固定连杆1.4和连杆铰支座1.8共同组成第一层四连杆结构,固定外连杆1.1作为连杆收放门架结构的大臂直接承载拖体4,电动推杆1.5通过伸缩运动推动第一层四连杆结构旋转,实现固定外连杆1.1的旋转运动,四连杆结构的使用可保证运动稳定,且有利于缩减电动推杆1.5的伸缩行程。固定外连杆1.1、固定内连杆1.2、连杆铰支座1.8和拖体柔性收放装置3共同组成第二层平行四边形四连杆结构,在固定外连杆1.1带动拖体4旋转的同时,使拖体柔性收放装置3始终保持竖直,从而保证拖体4始终水平。
45.推杆铰支座1.6在自动绞车装置2外侧安装在舰艇上,连杆铰支座1.8安装在舰艇靠外一侧。电动推杆1.5的固定端铰接安装在推杆铰支座1.6上,固定外连杆1.1、固定内连杆1.2和固定连杆1.4的底端分别铰接设置在连杆铰支座1.8上,固定外连杆1.1和固定内连
杆1.2的顶端分别与拖体柔性收放装置3铰接相连,电动推杆1.5的伸缩端与过度连杆1.3和固定连杆1.4的顶端铰接相连。过度连杆1.3的底端与固定外连杆1.1铰接相连。力矩检测传感器1.7安装在电动推杆1.5上,用于检测固定外连杆1.1的力矩变化。
46.自动绞车装置2为实现拖体4释放、水中拖行、深度调整、拖体回收的主要装置。如图2所示,自动绞车装置2主要由卷筒2.1、卷扬电机2.2、自动排缆组件2.3、蜗轮蜗杆减速器、电磁刹车、编码器、电控柜等组成。
47.卷扬电机2.2位于卷筒2.1一侧,卷扬电机2.2通过蜗轮蜗杆减速器与自动排缆组件2.3相连,本实施例中自动排缆组件2.3为丝杠螺母副,丝杠螺母副包括丝杠、导缆轮,导缆轮螺纹连接在丝杠上,缆绳绕在导缆轮上,丝杠设置在卷筒2.1前方,导缆轮牵引缆绳,缆绳卷收在卷筒2.1上。本实施例中卷扬电机1.2为交流变频电机。卷扬电机2.2驱动丝杠旋转带动导缆轮沿丝杠在水平方向上左右移动,自动排缆组件2.3将卷扬电机2.2的旋转运动转化为直线运动,缆绳自动排缆卷收在卷筒2.1上。
48.为确保导缆轮在安全工作区域,在丝杠的两端分别安装有行程开关,两个行程开关的间距为卷筒2.1工作长度,当缆绳碰触到行程开关时,卷扬电机2.2带动丝杠反转,从而实现自动换向。
49.电磁刹车和编码器分别与电控柜数据相连,电控柜通过电磁刹车与卷扬电机2.2相连,用于控制卷扬电机2.2停车。编码器可选用光电编码器,在卷筒2.1和丝杠上分别设置编码器,卷筒2.1上的编码器用于检测卷筒2.1的转速,并将卷筒转速传送至电控柜,电控柜中的pid控制器根据卷筒2.1转速及丝杠与卷筒2.1的转速比可计算出丝杠的排缆转速,电控柜以此转速为自动排缆组件2.3的预定转速。丝杠上的编码器用于检测丝杠的实时转速,并将实时转速反馈回电控柜的pid控制器,pid控制器将丝杠的实时转速与预定转速进行比较,并根据转速差,调节卷扬电机2.2的转速,进而对丝杠转速进行调整,使其实时转速与预定转速相同,实现丝杠对卷筒2.1实时跟随控制。由此实现对自动排缆组件2.3的闭环反馈控制。
50.自动绞车装置2作业时,卷筒2.1按输入的速度和方向收放缆绳,绕有缆绳的导缆轮在丝杠的带动下按响应的速度和方向水平移动,使缆绳整齐的排列在卷筒2.1上,并通过pid控制器根据丝杠的实时转速和预定转速进行比较,通过卷扬电机2.2调整丝杠转速的自动排缆技术,确保丝杠与卷筒2.1协调运动。当导缆轮移动到丝杠两端时,行程开关向pid控制器发出换向指令,自动排缆组件2.3进行自动换向,通过周期往返运动,自动绞车装置2使缆绳整齐密实地缠绕在卷筒2.1上,实现自动排缆,保证自动绞车装置2能够顺利地进行收放工作。
51.另外,自动绞车装置2上还设有张力检测传感器,用于检测缆绳上的张力变化,实时监测缆绳张力变化情况。张力检测传感器将张力信息反馈给pid控制器,pid控制器根据张力信息、卷筒转速信息,计算绳宽距离变化、丝杠行走一个绳宽距离所需的转动的圈数及卷扬电机2.2需要的转速,pid控制器控制卷扬电机2.2带动丝杠旋转,实现自动排缆功能。
52.拖体柔性收放装置3如图4所示,包括铰接短轴3.1、方形固定盘3.2、线缆滑轮3.3、楔形定位夹3.4、伞形拖体回收罩3.5、铰接长轴3.6。
53.两个方形固定盘3.2对称安装在拖体柔性收放装置3支架顶端。铰接短轴3.1的两端分别穿过两个方形固定盘3.2上部靠近舰艇的一端,与固定内连杆1.2铰接。铰接长轴3.6
的两端分别穿过两个方形固定盘3.2下部远离舰艇的一端,与固定外连杆1.1铰接。由于铰接长轴3.6与铰接短轴3.1相比较长,因此,固定外连杆1.1与固定内连杆1.2在转动时不互相影响。
54.在铰接长轴3.6下方,线缆滑轮3.3安装在拖体柔性收放装置3支架上,卷收在自动绞车装置2上的缆绳一端绕过线缆滑轮3.3后,改变方向朝向伞形拖体回收罩3.5,穿过楔形定位夹3.4与线缆滑轮3.3下方的拖体4相连。
55.本实施例中楔形定位夹3.4由两个楔形定位板拼装组成,缆绳由两个楔形定位板之间穿过与拖体4上方的筋板相连。两个楔形定位板上部通过多个螺栓紧固夹紧缆绳,楔形定位板下端为楔形端,楔形端只能以预定方向穿过伞形拖体回收罩3.5中间的导向槽。当拖体4回收时,楔形定位夹3.4的楔形端通过旋转调整至预定方向,且在调整的同时带动拖体4调整至预定回收方向,调整完成后楔形端以预定方向穿过伞形拖体回收罩3.5的导向槽,并带动拖体4进入伞形拖体回收罩3.5的回收范围,方便拖体4回收。
56.或者,在另一实施例中,楔形定位夹3.4采用一体式结构,楔形定位夹3.4内具有通孔,且楔形定位夹3.4上部利用夹紧件压紧缆绳,楔形定位夹3.4下部为楔形端。
57.伞形拖体回收罩3.5安装在拖体柔性收放装置3支架下方,其与拖体4的对接结构可根据拖体4形式设计,通过更换对接结构,可以针对各种形式的拖体4进行自主收放作业。
58.本实施例以伞形对接结构的伞形拖体回收罩3.5为例进行说明,伞形拖体回收罩3.5由两个对称结构的对接体组成,两个对接体对称安装在拖体柔性收放装置3支架底端两侧,形成伞形对接结构。两个对接体之间留有预定间距的间隙,该间隙为导向槽,楔形定位夹3.4由该导向槽中穿过,两个对接体的外端通过连接件相接,避免楔形定位夹3.4脱离导向槽。在拖体4回收时,拖体4上方的筋板在缆绳及楔形定位夹3.4作用下,嵌入导向槽中,使得拖体4紧压在对接体内侧。为避免拖体4与伞形拖体回收罩3.5相接时损伤拖体4,本实施例还在两个对接体底部分别设有柔性垫,在保证一定缓冲的同时,还可实现柔性定位。
59.在两个连杆收放装置1之间,拖体安放座4.1置于舰艇上,拖体4在非作业时,回收至拖体安放座4.1上。在拖体安放座4.1上设有拖体到位检测开关4.2,用于检测拖体4入仓状态,并将拖体定位信息传送至pid控制器。
60.本实施例的拖体收放系统在电动推杆1.5向外推动连杆收放门架结构向下旋转,以及自动绞车装置2释放缆绳作用下,可将拖体4释放至预定位置。
61.收回拖体4时,电动推杆1.5通过收缩运动带动连杆收放门架结构向上旋转,同时,自动绞车装置2卷收缆绳。缆绳首先牵引楔形定位夹3.4回收至伞形拖体回收罩3.5中间的导向槽中,在楔形定位夹3.4楔形端与导向槽的作用下,楔形定位夹3.4在上提过程中,经过伞形拖体回收罩3.5中的导向槽,楔形定位夹3.4在楔形导向作用下自动旋转,顺利导入并穿过导向槽,随着楔形定位夹3.4的旋转,拖体4一同旋转至伞形回收罩3.5的回收范围内,在导向槽导向的作用下拖体4顺利进入伞形拖体回收罩3.5内,完成定位回收。
62.拖体4进入伞形拖体回收罩3.5内后,电动推杆1.5继续收回,伞形拖体回收罩3.5压紧拖体4,并利用柔性定位,保证船体运行过程中,拖体4不发生磕碰。
63.当拖体4回收落于拖体安放座4.1上后,拖体到位检测开关4.2检测拖体4的入仓信息,pid控制器根据连杆收放门架的力矩信息、拖体定位信息,控制电动推杆1.5、卷扬电机2.2动作,直至拖体4移至指定位置,电动推杆1.5、卷扬电机2.2停机,完成拖体4回收。
64.另外,本实施例的拖体收放系统还能实现拖体4的定深控制,以在作业时,保证拖体4按一定深度稳定运行。
65.本拖体收放系统通过张力检测传感器、卷筒2.1的编码器、卷扬电机2.2、pid控制器、拖体深度传感器、船速检测器及流速传感器等组成拖体定深机构,其通过张力检测传感器实时监测缆绳张力变化情况;通过卷筒2.1上的编码器实时检测卷筒2.1的转速;拖体深度传感器设置在拖体柔性收放装置3上,通过缆绳的下放长度获取拖体深度信息,船速检测器为舰艇上自带的速度检测器,用于检测船速,流速传感器安装在舰艇上,用于检测水流速度。pid控制器采集张力信息、卷筒转速信息、拖体深度信息、船速、流速等信息,根据拖体4深度变化、缆绳的张力变化,通过卷扬电机2.2控制缆绳的收放,实现拖体定深控制。
66.此外,为保证在高海况下收放拖体4,拖体收放系统通过张力检测传感器、卷筒2.1的编码器、力矩检测传感器1.7、电动推杆1.5、卷扬电机2.2、pid控制器等组件组成海浪力矩补偿装置,以满足高海况下对拖体4的收放。pid控制器采集张力信息、卷筒转速信息、力矩信息,决定是否切换工作状态:如收放时连杆收放门架结构是否入水,波浪冲击力变化,拖体4是否脱出水面,缆绳是否紧绷等。通过对电动推杆1.5、卷扬电机2.2的控制,实现连杆收放门架结构力矩变速控制,缆绳收放张力变速控制,以此对海浪作用进行补偿,实现拖体4稳定收放。
67.本实施例的拖体4不局限于声呐,通过改变伞形拖体回收罩3.5,可根据需要进行各种拖体的回收释放。
68.虽然上面结合本实用新型的优选实施例对本实用新型的原理进行了详细的描述,本领域技术人员应该理解,上述实施例仅仅是对本实用新型的示意性实现方式的解释,并非对本实用新型包含范围的限定。实施例中的细节并不构成对本实用新型范围的限制,在不背离本实用新型的精神和范围的情况下,任何基于本实用新型技术方案的等效变换、简单替换等显而易见的改变,均落在本实用新型保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1