一种四维搬移转运装置的制作方法
1.本实用新型涉及自动化设备技术领域,尤其涉及一种四维搬移转运装置。
背景技术:
2.对于尺寸精度要求很好的产品而言,在产品出厂前,必须要对重点尺寸进行测量,以确保产品的出厂质量。
3.其中,通过自动测量仪来完成产品相关尺寸参数的测量已经非常普遍;在利用自动测量仪对产品进行测量时,产品先放置于自动测量仪的测量工作台上,而后自动测量仪的测量组件动作并完成产品相关位置尺寸数据的采集测量,且自动测量仪自动判断产品是否为良品或者不良品。
4.需指出的是,在利用自动测量仪对产品尺寸进行测量的过程中,现有技术普遍采用人工上件的方式,即测量人员通过手工方式将待测量产品放置于自动测量仪的测量工作台上;对于上述人工上件方式的自动测量仪而言,其存在自动化程度低、工作效率低的缺陷。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足而提供一种四维搬移转运装置,该四维搬移转运装置结构设计新颖、搬移转运效率高,且能够有效地提高自动测量仪的测量效率。
6.为达到上述目的,本实用新型通过以下技术方案来实现。
7.一种四维搬移转运装置,包括有机架,机架的上端部设置有呈水平横向布置的固定支撑板,固定支撑板装设有前后水平动作的移送驱动机构,移送驱动机构的驱动端装设有伺服旋转平台,伺服旋转平台的驱动端装设有呈水平横向布置的水平活动架,水平活动架装设有左侧抓取机构、位于左侧抓取机构旁侧的右侧抓取机构;
8.左侧抓取机构、右侧抓取机构分别包括有装设于水平活动架的抓取平移驱动模组,各抓取平移驱动模组的驱动端分别装设有抓取升降驱动模组,各抓取升降驱动模组的驱动端分别装设有呈水平横向布置的取料吸板。
9.其中,所述抓取平移驱动模组包括有分别装设于所述水平活动架且左右间隔布置的主动同步带轮、从动同步带轮,主动同步带轮与从动同步带轮之间绕装有传动同步带;抓取平移驱动模组还包括有抓取平移活动架,抓取平移活动架与传动同步带连接,所述抓取升降驱动模组装设于抓取平移活动架;
10.水平活动架对应主动同步带装设有抓取平移驱动电机,抓取平移驱动电机的动力输出轴与主动同步带轮驱动连接。
11.其中,所述抓取升降驱动模组包括有抓取升降活动架、螺装于所述抓取平移活动架的抓取升降驱动电机,所述取料吸板装设于抓取升降活动架,抓取升降驱动电机的动力输出轴装设有抓取升降驱动凸轮;抓取升降活动架装设有位于抓取升降驱动凸轮上端侧的
抓取升降驱动压轮,抓取升降驱动压轮与抓取升降驱动凸轮的凸轮面滚动接触。
12.其中,所述抓取平移活动架与所述抓取升降活动架之间装设有拉簧,拉簧的上端部与抓取升降活动架连接,拉簧的下端部与抓取平移活动架连接。
13.其中,所述抓取平移活动架对应所述拉簧螺装有下端安装螺栓,所述抓取升降活动架对应拉簧螺装有上端安装螺栓,拉簧的上端部钩挂于上端安装螺栓,拉簧的下端部钩挂于下端安装螺栓。
14.其中,所述水平活动架与所述抓取平移活动架之间装设有抓取平移导向副,抓取平移导向副包括有螺装于所述水平活动架且呈水平横向布置的抓取平移直线导轨、螺装于抓取平移活动架的抓取平移直线滑块,抓取平移直线导轨与抓取平移直线滑块相配合。
15.其中,所述抓取升降活动架与所述抓取平移活动架之间装设有抓取升降导向副,抓取升降导向副包括有螺装于抓取平移活动架且呈竖向布置的抓取升降直线导轨、螺装于抓取升降活动架的抓取升降直线滑块,抓取升降直线导轨与抓取升降直线滑块相配合。
16.其中,所述移送驱动机构包括有螺装于所述固定支撑板的移送驱动电机,移送驱动电机的动力输出轴通过联轴器连设有沿着前后方向水平延伸的移送驱动丝杆,移送驱动丝杆的前端部、后端部分别通过轴承座安装于机架;
17.移送驱动机构还包括有移送驱动活动架,所述伺服旋转平台装设于移送驱动活动架,移送驱动活动架对应移送驱动丝杆螺装有移送驱动螺母,移送驱动丝杆与移送驱动螺母相配合。
18.其中,所述固定支撑板与所述移送驱动活动架之间装设有移送驱动导向副,移送驱动导向副包括有螺装于固定支撑板上表面且沿着前后方向水平延伸的移送驱动直线导轨、螺装于移送驱动活动架的移送驱动直线滑块,移送驱动直线导轨与移送驱动直线滑块相配合。
19.本实用新型的有益效果为:本实用新型所述的一种四维搬移转运装置,其固定支撑板装设有前后水平动作的移送驱动机构,移送驱动机构的驱动端装设有伺服旋转平台,伺服旋转平台的驱动端装设有呈水平横向布置的水平活动架,水平活动架装设有左侧抓取机构、位于左侧抓取机构旁侧的右侧抓取机构;左侧抓取机构、右侧抓取机构分别包括有装设于水平活动架的抓取平移驱动模组,各抓取平移驱动模组的驱动端分别装设有抓取升降驱动模组,各抓取升降驱动模组的驱动端分别装设有呈水平横向布置的取料吸板。通过上述结构设计,本实用新型具有结构设计新颖、搬移转运效率高的优点,且能够有效地提高自动测量仪的测量效率。
附图说明
20.下面利用附图来对本实用新型进行进一步的说明,但是附图中的实施例不构成对本实用新型的任何限制。
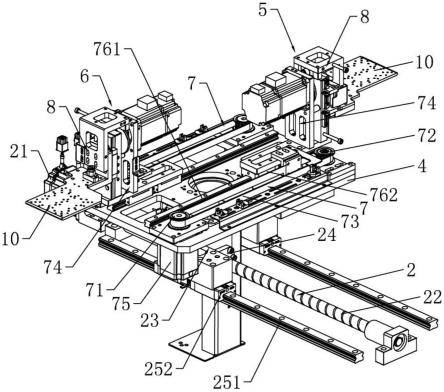
21.图1为本实用新型的结构示意图。
22.图2为本实用新型的局部结构示意图。
23.图3为本实用新型的另一视角的局部结构示意图。
24.图4为本实用新型的抓取升降驱动模组的结构示意图。
25.图5为本实用新型的抓取升降驱动模组的剖面示意图。
26.在图1至图5中包括有:
27.1——固定支撑板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2——移送驱动机构
28.21——移送驱动电机
ꢀꢀꢀꢀꢀꢀꢀ
22——移送驱动丝杆
29.23——移送驱动活动架
ꢀꢀꢀꢀꢀ
24——移送驱动螺母
30.251——移送驱动直线导轨
ꢀꢀ
252——移送驱动直线滑块
31.3——伺服旋转平台
ꢀꢀꢀꢀꢀꢀꢀꢀ
4——水平活动架
32.5——左侧抓取机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
6——右侧抓取机构
33.7——抓取平移驱动模组
ꢀꢀꢀꢀ
71——主动同步带轮
34.72——从动同步带轮
ꢀꢀꢀꢀꢀꢀꢀ
73——传动同步带
35.74——抓取平移活动架
ꢀꢀꢀꢀꢀ
75——抓取平移驱动电机
36.761——抓取平移直线导轨
ꢀꢀ
762——抓取平移直线滑块
37.8——抓取升降驱动模组
ꢀꢀꢀꢀ
81——抓取升降活动架
38.82——抓取升降驱动电机
ꢀꢀꢀ
83——抓取升降驱动凸轮
39.84——抓取升降压轮
ꢀꢀꢀꢀꢀꢀꢀ
851——抓取升降直线导轨
40.852——抓取升降直线滑块
ꢀꢀ
91——下端安装螺栓
41.92——上端安装螺栓
ꢀꢀꢀꢀꢀꢀꢀ
10——取料吸板。
具体实施方式
42.下面结合具体的实施方式来对本实用新型进行说明。
43.如图1至图3所示,一种四维搬移转运装置,包括有机架,机架的上端部设置有呈水平横向布置的固定支撑板1,固定支撑板1装设有前后水平动作的移送驱动机构2,移送驱动机构2的驱动端装设有伺服旋转平台3,伺服旋转平台3的驱动端装设有呈水平横向布置的水平活动架4,水平活动架4装设有左侧抓取机构5、位于左侧抓取机构5旁侧的右侧抓取机构6。
44.其中,左侧抓取机构5、右侧抓取机构6分别包括有装设于水平活动架4的抓取平移驱动模组7,各抓取平移驱动模组7的驱动端分别装设有抓取升降驱动模组8,各抓取升降驱动模组8的驱动端分别装设有呈水平横向布置的取料吸板10。
45.需指出的是,本实用新型应用于自动测量仪,左侧抓取机构5、右侧抓取机构6分别配置有料仓,料仓用于装载待测量产品。
46.在本实用新型工作过程中,左侧抓取机构5从相应的料仓抓取待测量产品,右侧抓取机构6从相应的料仓抓取待测量产品;待被测量产品被抓取后,移送驱动机构2动作并驱动伺服旋转平台3、水平活动架4、左侧抓取机构5、右侧抓取机构6以及被抓取的待测量产品朝自动测量仪的测量工作台移动;本实用新型通过左侧抓取机构5、右侧抓取机构6能够一次性抓取两个待测量产品,在移送驱动机构2将被测量产品移送至自动测量仪的测量工作台位置后,伺服旋转平台3动作且伺服旋转平台3驱动水平活动架4、左侧抓取机构5、右侧抓取机构6进行水平旋转,以使得由左侧抓取机构5所抓取的产品以及由右侧抓取机构6所抓取的产品先后依次放置于自动测量仪的测量工作台上。
47.需进一步指出的是,在左侧抓取机构5或者右侧抓取机构6从相应的料仓抓取待测量产品的过程中,移送驱动机构2、伺服旋转平台3动作并使得取料吸板10对准抓取位置的
产品,而后抓取平移驱动模组7驱动取料吸板10水平移动至料仓内,且取料吸板10伸入至待抓取产品的下方;而后抓取升降驱动模组8驱动取料吸板10上移并使得取料吸板10吸附抓取产品;待取料吸板10吸附抓取产品后,抓取偏移驱动模组再次动作并使得取料吸板10携带产品从料仓移出,以完成产品抓取动作。
48.综合上述情况可知,通过上述结构设计,本实用新型能够自动高效地实现自动测量仪产品上料作业;故而,本实用新型具有结构设计新颖、搬移转运效率高的优点,且能够有效地提高自动测量仪的测量效率。
49.作为优选的实施方式,如图1至图3所示,抓取平移驱动模组7包括有分别装设于水平活动架4且左右间隔布置的主动同步带轮71、从动同步带轮72,主动同步带轮71与从动同步带轮72之间绕装有传动同步带73;抓取平移驱动模组7还包括有抓取平移活动架74,抓取平移活动架74与传动同步带73连接,抓取升降驱动模组8装设于抓取平移活动架74。
50.其中,水平活动架4对应主动同步带装设有抓取平移驱动电机75,抓取平移驱动电机75的动力输出轴与主动同步带轮71驱动连接。
51.需解释的是,为保证抓取平移活动架74平稳可靠地水平移动,本实用新型采用下述导向结构设计,具体的:水平活动架4与抓取平移活动架74之间装设有抓取平移导向副,抓取平移导向副包括有螺装于水平活动架4且呈水平横向布置的抓取平移直线导轨761、螺装于抓取平移活动架74的抓取平移直线滑块762,抓取平移直线导轨761与抓取平移直线滑块762相配合。
52.工作时,对于本实用新型的抓取平移驱动模组7而言,抓取平移驱动电机75通过由主动同步带轮71、从动同步带轮72、传动同步带73所组成的同步带传动机构驱动抓取平移活动架74水平移动,水平移动的抓取平移活动架74带动抓取升降驱动模组8水平移动,进而使得取料吸板10水平移动。
53.作为优选的实施方式,如图4和图5所示,抓取升降驱动模组8包括有抓取升降活动架81、螺装于抓取平移活动架74的抓取升降驱动电机82,取料吸板10装设于抓取升降活动架81,抓取升降驱动电机82的动力输出轴装设有抓取升降驱动凸轮83;抓取升降活动架81装设有位于抓取升降驱动凸轮83上端侧的抓取升降驱动压轮,抓取升降驱动压轮与抓取升降驱动凸轮83的凸轮面滚动接触。
54.其中,为保证抓取升降活动架81平稳可靠地上下升降移动,本实用新型采用下述导向结构设计,具体的:抓取升降活动架81与抓取平移活动架74之间装设有抓取升降导向副,抓取升降导向副包括有螺装于抓取平移活动架74且呈竖向布置的抓取升降直线导轨851、螺装于抓取升降活动架81的抓取升降直线滑块852,抓取升降直线导轨851与抓取升降直线滑块852相配合。
55.在抓取升降驱动模组8工作过程中,抓取升降驱动电机82驱动抓取升降驱动凸轮83转动,由于抓取升降驱动压轮保持与抓取升降驱动凸轮83的凸轮面滚动接触,在抓取升降驱动凸轮83转动的过程中,抓取升降驱动凸轮83驱动抓取升降驱动压轮上下升降移动,抓取升降驱动压轮374带动抓取升降活动架81、取料吸板10上下升降移动。
56.作为优选的实施方式,如图4所示,抓取平移活动架74与抓取升降活动架81之间装设有拉簧,拉簧的上端部与抓取升降活动架81连接,拉簧的下端部与抓取平移活动架74连接。
57.具体的,如图4所示,本实用新型的拉簧采用以下方式安装于抓取平移活动架74与抓取升降活动架81之间,具体的:抓取平移活动架74对应拉簧螺装有下端安装螺栓91,抓取升降活动架81对应拉簧螺装有上端安装螺栓92,拉簧的上端部钩挂于上端安装螺栓92,拉簧的下端部钩挂于下端安装螺栓91。
58.在本实用新型的抓取升降驱动模组8驱动取料吸板10上下升降移动的过程中,拉簧保持朝下拉动抓取升降活动架81,以使得抓取升降驱动压轮保持于抓取升降驱动凸轮83的凸轮面稳定可靠地滚动接触,以提高取料吸板10上下升降移动的准确性。
59.作为优选的实施方式,如图1至图3所示,移送驱动机构2包括有螺装于固定支撑板1的移送驱动电机21,移送驱动电机21的动力输出轴通过联轴器连设有沿着前后方向水平延伸的移送驱动丝杆22,移送驱动丝杆22的前端部、后端部分别通过轴承座安装于机架。
60.其中,移送驱动机构2还包括有移送驱动活动架23,伺服旋转平台3装设于移送驱动活动架23,移送驱动活动架23对应移送驱动丝杆22螺装有移送驱动螺母24,移送驱动丝杆22与移送驱动螺母24相配合。
61.为保证移送驱动活动架23平稳可靠地前后水平移动,本实用新型采用下述导向结构设计,具体的:固定支撑板1与移送驱动活动架23之间装设有移送驱动导向副,移送驱动导向副包括有螺装于固定支撑板1上表面且沿着前后方向水平延伸的移送驱动直线导轨251、螺装于移送驱动活动架23的移送驱动直线滑块252,移送驱动直线导轨251与移送驱动直线滑块252相配合。
62.在移送驱动机构2驱动被抓取产品从前往后移送的过程中,移送驱动电机21通过由移送驱动丝杆22、移送驱动螺母24所组成的丝杆传动机构驱动移送驱动活动架23朝后移动,在此过程中,移送驱动活动架23带着伺服旋转平台3、水平活动架4、左侧抓取机构5、右侧抓取机构6以及被抓取的产品同步朝后移动。
63.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1