一种条形零件的自动上料设备的制作方法
1.本实用新型涉及钣金加工技术领域,尤其涉及一种条形零件的自动上料设备。
背景技术:
2.在钣金生产行业,经常需要将钣金从堆料状态中分离成单件并自动取出,完成上料工作,常用的方法是采用人工完成分料,这种方式的效率较低。
3.现有的方法是采用机器人进行上料工作,提高了上料效率。
4.但通过机器人上料,生产过程中经常需要生产不同厚度与不同宽度的条料,控制程序与操作逻辑调整较为复杂,导致成本较高。
技术实现要素:
5.本实用新型的目的在于提供一种条形零件的自动上料设备,解决了由于通过机器人上料,生产过程中经常需要生产不同厚度与不同宽度的条料,控制程序与操作逻辑调整较为复杂,导致成本较高的技术问题。
6.为实现上述目的,本实用新型提供了一种条形零件的自动上料设备,包括底座、定位托盘、真空抓手组件、伺服横移机构、升降模组和控制箱,所述升降模组设置于所述底座的上方,并与所述伺服横移机构连接,所述真空抓手组件通过拖链与所述伺服横移机构连接,并位于所述伺服横移机构的下方,所述控制箱设置于所述底座的一侧,并分别与所述真空抓手组件和所述升降模组电性连接,所述定位托盘与所述底座拆卸连接,并位于所述真空抓手组件的下方。
7.其中,所述定位托盘包括托盘基板、托盘拉手、托盘快插销和限位柱,所述托盘基板与所述底座拆卸连接,并位于所述真空抓手组件的下方,所述托盘基板的相对两侧均设置有两个所述托盘拉手,所述托盘基板的顶端设置有多个定位孔,所述托盘快插销的数量为两个,两个所述托盘快插销分别安装于所述托盘基板的两端,所述限位柱的数量为四个,每个所述限位柱分别安装于对应的所述定位孔内。
8.其中,所述真空抓手组件包括固定支架、吸盘安装板、接近开关、光电开关、真空吸盘和感应片,所述固定支架与所述伺服横移机构连接,并位于所述伺服横移机构的下方,所述固定支架的底部间隔均匀设置有多个所述吸盘安装板,所述固定支架的一侧分别设置有所述接近开关和所述光电开关,每个所述吸盘安装板的底部均安装有对应的所述真空吸盘,所述感应片与其中一个所述真空吸盘连接,并位于所述接近开关的下方。
9.其中,所述升降模组包括第一伺服电机、行星减速机、机架、升降座、第一传感器、导轨、升降限位件、丝杆和防护罩,所述机架与所述底座固定连接,并位于所述底座的上方,所述第一伺服电机设置于所述机架的顶端,所述第一伺服电机通过所述行星减速机与所述丝杆连接,所述丝杆的输出端与所述升降座连接,所述机架的两端均设置有所述导轨,所述升降座与所述导轨滑动连接,所述升降限位件设置于所述升降座的下方,所述机架的外侧设置有防护罩,所述防护罩的外侧设置有第一传感器。
10.其中,所述伺服横移机构包括第二伺服电机、直线模组、滑板和第二传感器,所述直线模组与所述升降座连接,所述第二伺服电机与所述直线模组连接,所述直线模组的输出端设置有所述滑板,所述滑板与所述固定支架连接,所述第二传感器设置于所述直线模组的一侧。
11.本实用新型的一种条形零件的自动上料设备,利用所述定位托盘进行人工堆料,通过所述真空抓手组件将工件抓取,再通过所述伺服横移机构进行送料,该装置实现了多种厚度,多种宽度的条形零件的自动上料;一次人工或其他设备完成堆料的摆放后,即可连续生产,中途无需人工或其他设备介入,设备结构及控制操作方式简单,使得生产成本降低。
附图说明
12.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
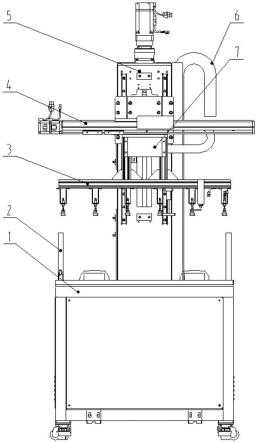
13.图1是本实用新型一种条形零件的自动上料设备的正视图。
14.图2是本实用新型一种条形零件的自动上料设备的侧视图。
15.图3是本实用新型的定位托盘的俯视图。
16.图4是本实用新型的定位托盘的正视图。
17.图5是本实用新型的真空抓手组件的正视图。
18.图6是本实用新型的升降模组的正视图。
19.图7是本实用新型的升降模组的侧视图。
20.图8是本实用新型的伺服横移机构的正视图。
21.图9是本实用新型的伺服横移机构的侧视图。
22.1-底座、2-定位托盘、3-真空抓手组件、4-伺服横移机构、5-升降模组、6-拖链、7-控制箱、8-工件、9-托盘基板、10-托盘拉手、11-托盘快插销、12-限位柱、13-限位柱、14-固定支架、15-吸盘安装板、16-接近开关、17-光电开关、18-真空吸盘、19-感应片、20-第一伺服电机、21-行星减速机、22-机架、23-升降座、24-第一传感器、25-导轨、26-升降限位件、27-丝杆、28-防护罩、29-第二伺服电机、30-直线模组、31-滑板、32-第二传感器。
具体实施方式
23.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
24.请参阅图1-图9,本实用新型提供一种条形零件的自动上料设备,包括底座1、定位托盘2、真空抓手组件3、伺服横移机构4、升降模组5和控制箱7,所述升降模组5设置于所述底座1的上方,并与所述伺服横移机构4连接,所述真空抓手组件3通过拖链6与所述伺服横移机构4连接,并位于所述伺服横移机构4的下方,所述控制箱7设置于所述底座1的一侧,通过电气控制系统进行控制,所述定位托盘2与所述底座1拆卸连接,并位于所述真空抓手组件3的下方。
25.针对本具体实施方式,条形零件堆料的上料主要由人工或其他设备完成,将多层
堆料放置在条形零件的定位托盘2上即可;
26.真空抓取系统工作:所述升降模组5下降到一定高度,抓手上的所述接近开关16输出信号,自动判断下降高度足够,所述升降模组5停止下降;启动真空发生器,产生真空,吸盘吸牢工件8;真空系统中的真空检测表数字达到预设的真空度,输出信号,然后所述第一伺服电机20启动,将抓手提升到送料高度位置。
27.送料过程:所述伺服横移机构4启动,根据需要送料的长度距离,将板材送料到后续生产设备上。
28.完成送料后,所有机构复位,进行下一循环,直到抓手光电传感器判断堆料抓取完毕后,提醒人工或上料设备上料。
29.其中,所述定位托盘2包括托盘基板10、托盘拉手11、托盘快插销12和限位柱13,所述托盘基板10与所述底座1拆卸连接,并位于所述真空抓手组件3的下方,所述托盘基板10的相对两侧均设置有两个所述托盘拉手11,所述托盘基板10的顶端设置有多个定位孔,所述托盘快插销12的数量为两个,两个所述托盘快插销12分别安装于所述托盘基板10的两端,所述限位柱13的数量为四个,每个所述限位柱13分别安装于对应的所述定位孔内。
30.在本实施方式中,根据不同尺寸的工件8,将所述限位柱13插入不同的所述定位孔,方便对工件8进行定位。
31.进一步的,所述真空抓手组件3包括固定支架14、吸盘安装板15、接近开关16、光电开关17、真空吸盘18和感应片19,所述固定支架14与所述伺服横移机构4连接,并位于所述伺服横移机构4的下方,所述固定支架14的底部间隔均匀设置有多个所述吸盘安装板15,所述固定支架14的一侧分别设置有所述接近开关16和所述光电开关17,每个所述吸盘安装板15的底部均安装有对应的所述真空吸盘18,所述感应片19与其中一个所述真空吸盘18连接,并位于所述接近开关16的下方。
32.在本实施方式中,所述真空吸盘18安装有止回阀,接近传感器安装在抓手上,所述感应片19安装在所述真空吸盘18的浮动弹簧轴上,两者结合使用可用于自动判断抓手的升降高度是否足够,实现了在生产不同板材厚度时,不用调整控制程序参数而自动抓取的功能;实施光电传感器用于判断抓手下方是否有物料等待抓取(若没有物料时,会发生信号提醒补料)。
33.进一步的,所述升降模组5包括第一伺服电机20、行星减速机21、机架22、升降座23、第一传感器24、导轨25、升降限位件26、丝杆27和防护罩28,所述机架22与所述底座1固定连接,并位于所述底座1的上方,所述第一伺服电机20设置于所述机架22的顶端,所述第一伺服电机20通过所述行星减速机21与所述丝杆27连接,所述丝杆27的输出端与所述升降座23连接,所述机架22的两端均设置有所述导轨25,所述升降座23与所述导轨25滑动连接,所述升降限位件26设置于所述升降座23的下方,所述机架22的外侧设置有防护罩28,所述防护罩28的外侧设置有第一传感器24。
34.在本实施方式中,所述第一伺服电机20启动后,通过所述行星减速机21进行减速,在驱动所述丝杆27转动,所述丝杆27上的螺母进行上下移动,从而带动所述升降座23沿所述导轨25移动,所述升降限位件26用于限制所述升降座23的最低高度。
35.进一步的,所述伺服横移机构4包括第二伺服电机29、直线模组30、滑板31和第二传感器32,所述直线模组30与所述升降座23连接,所述第二伺服电机29与所述直线模组30
连接,所述直线模组30的输出端设置有所述滑板31,所述滑板31与所述固定支架14连接,所述第二传感器32设置于所述直线模组30的一侧。
36.在本实施方式中,所述第二伺服电机29驱动所述直线模组30,带动所述滑板31移动,所述滑板31可带动所述真空抓手组件3移动,从而将吸附起来的工件8送至后续设备。
37.以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1