吨袋包装机的制作方法
1.本实用新型涉及包装设备技术领域,尤其涉及一种吨袋包装机。
背景技术:
2.吨袋又称柔性集装袋、太空袋等,具有容量大、重量轻、便于装卸等有点,常用于装运大宗散装粉状物料,例如目前锂电行业的正负极材料等就常利用吨袋进行包装,这类吨袋通常具有袋口和提手。吨袋包装机是用于吨袋包装物料的大型称重的包装设备,它是集电子称重、自动脱袋、除尘于一体的多用途包装机。目前大部分吨袋包装机都是采用人工套袋,抽真空,封口等工作。
3.由于吨袋的装料量较大,因此通常需要专用的包装机来进行包装作业,现有的包装机通常通过下料管来连接袋口以供物料灌入吨袋,利用挂钩等来钩挂吨袋的提手以保持吨袋形状。现有的吨袋包装机在装料称重时可能会出现精度不准确的情况,进而影响吨袋的装料。
技术实现要素:
4.本实用新型提供一种解决上述技术问题的吨袋包装机。
5.为实现上述目的,本实用新型的技术方案是:一种吨袋包装机,包括:
6.料槽,用于放置吨袋,所述吨袋上设置有标识;
7.灌料装置,具有灌料口,用于对吨袋进行灌料;
8.取袋机构,能运动至所述料槽上方并将所述料槽内的所述吨袋取出并运送至第一位置,并将处于所述第一位置的所述吨袋张开;
9.套袋机构,配置为能够将所述吨袋从所述第一位置运送至第二位置,在所述第二位置,所述吨袋能够被套接于所述灌料口;
10.第一称重件,用于对第一次灌料之后的吨袋进行称重,所述第一称重件具有第一预设值;
11.第二称重件,用于对吨袋进行二次称重,所述第二称重件具有第二预设值;
12.过渡架,设置在所述灌料装置的下方;
13.升降组件,配置为能够上升或下降以使所述过渡架连接或脱离所述灌料装置;
14.主机架,所述升降组件设置在所述主机架上。
15.优选的,所述灌料装置包括称重架、灌料管、定袋夹爪、挂钩和灌料管升降气缸,所述定袋夹爪和所述挂钩铰接在所述称重架上,所述灌料管气缸固定在所述称重架上,所述灌料管连接所述灌料管气缸。
16.优选的,所述过渡架包括主体、挂环和底梁,所述挂环设置在所述主体的顶部,所述底梁设置所述主体的底端,所述主体与所述底梁连接呈门型。
17.优选的,所述升降组件包括升降架、滚筒、震动电机和顶块,所述滚筒和所述顶块均设置在所述升降架的顶部,所述震动电机设置在所述升降架的底部,其中,所述顶块设置
在所述升降架的两端。
18.优选的,所述取袋机构包括取袋x轴组件、取袋y轴组件、取袋z轴组件、取袋α轴组件以及取袋机架,所述料槽设置在所述取袋机架上,所述取袋x轴组件设置在所述取袋机架上,所述取袋x轴组件、所述取袋y轴组件和所述取袋z轴组件配合实现前后、左右和上下移动,所述取袋α轴组件固定在所述取袋z轴组件的末端,所述取袋α轴组件连接有过渡座,所述过渡座的底端连接有压板,所述压板上设置有上吸盘;
19.在所述取袋机架上设置有水平板,所述水平板上设置有缩回气缸,所述缩回气缸的气缸杆上连接有下吸盘,所述下吸盘与所述上吸盘相对设置。
20.优选的,所述压板的两端设置有摆动气缸和取袋夹爪,所述取袋夹爪连接所述摆动气缸,所述摆动气缸能动作使得所述取袋夹爪将所述吨袋压紧在所述压板上。
21.优选的,所述压板上设置有测距传感器以及标识传感器,所述标识传感器在所述压板上等位设置三个,其中,处于两端的两个所述标识传感器之间的距离与所述标识的长度相同。
22.优选的,所述套袋机构包括提升组件、翻转组件和夹袋组件,所述翻转组件设置在所述提升组件上,所述夹袋组件设置在所述翻转组件上。
23.优选的,所述提升组件包括套袋固定架、提升气缸、滑轨、滑块以及升降板,所述提升气缸设置在所述套袋固定架一侧并连接所述升降板,所述滑轨设置在所述套袋固定架上,所述升降板通过所述滑块滑动设置在所述滑轨上;
24.所述翻转组件包括翻转气缸、翻转轴、翻转臂、摆臂以及连接座,所述连接座连接所述升降板,所述翻转气缸设置在所述升降板上,所述翻转轴通过所述翻转臂连接所述翻转气缸,所述摆臂设置在所述转轴上且连接所述夹袋组件;
25.所述夹袋组件包括外夹爪、内夹爪、第一连杆、第二连杆、开合气缸以及缓冲器,所述摆臂、所述外夹爪、所述内夹爪、所述第一连杆以及所述第二连杆彼此之间铰接,所述开合气缸通过安装板连接所述摆臂,所述开合气缸连接所述第二连杆,所述第一连杆一端连接所述内夹爪,其另一端连接所述第二连杆。
26.优选的,所述第二预设值大于等于所述第一预设值。
27.与现有技术相比,本实用新型提供的吨袋包装机,通过设置料槽存放吨袋,在吨袋上设置标识,通过取袋机构识别标识将吨袋取出进而由套袋机构将吨袋套接在灌料装置的灌料口进行接料,实现吨袋的自动上袋和接料;通过设置第一称重件、第二称重件、升降组件、过渡架以及托盘的配合对装料的吨袋进行称重以及复称,实现吨袋包装机的自动称重以及自动添料,提高了吨袋包装机的称重精度。
附图说明
28.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
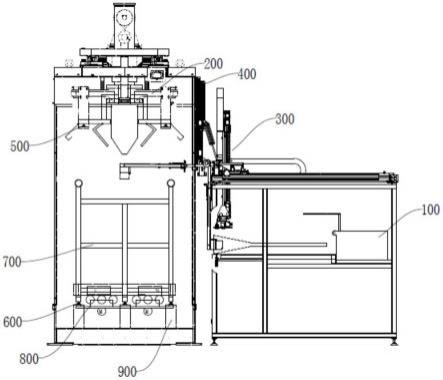
29.图1是本实用新型提供的吨袋包装机的结构示意图;
30.图2是本实用新型提供的吨袋的展开状态视图;
31.图3是本实用新型提供的吨袋的折叠状态视图;
32.图4是本实用新型提供的灌料装置的结构示意图;
33.图5是本实用新型提供的取袋机构的结构示意图;
34.图6是本实用新型提供的取袋机构的部分结构示意图;
35.图7是本实用新型提供的套袋机构的结构示意图;
36.图8是本实用新型提供的套袋机构的正面视图;
37.图9是本实用新型提供的套袋机构的侧面视图;
38.图10是本实用新型提供的夹袋组件的结构示意图;
39.图11是本实用新型提供的过渡架的结构示意图;
40.图12是本实用新型提供的吨袋、托盘与过渡架的连接视图;
41.图13是本实用新型提供的灌料装置、吨袋、过渡架以及提升组件的连接视图。
42.附图标记:
43.100、料槽;200、灌料装置;201、称重架;202、灌料管;203、定袋夹爪;204、挂钩;205、灌料管升降气缸;300、取袋机构;301、取袋x轴组件;302、取袋y轴组件;303、取袋z轴组件;304、取袋α轴组件;305、取袋机架;306、过渡座;307、压板;308、上吸盘;309、水平板;310、缩回气缸;311、下吸盘;312、摆动气缸;313、取袋夹爪;314、测距传感器;315、标识传感器;400、套袋机构;410、提升组件;411、套袋固定架;412、提升气缸;413、滑轨;414、滑块;415、升降板;420、翻转组件;421、翻转气缸;422、翻转轴;423、翻转臂;424、摆臂;425、连接座;426、轴承;427、安装座;430、夹袋组件;431、外夹爪;432、内夹爪;433、第一连杆;434、第二连杆;435、开合气缸;436、缓冲器;437、支撑板;500、第一称重件;600、第二称重件;700、过渡架;701、主体;702、挂环;703、底梁;800、升降组件;801、升降架;802、滚筒;803、震动电机;804、顶块;900、主机架;1000、标识。
具体实施方式
44.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
45.吨袋包装机是用于吨袋包装物料的大型称重的包装设备,它是集电子称重、自动脱袋、除尘于一体的多用途包装机。目前大部分吨袋包装机都是采用人工套袋,抽真空,封口等工作。国内外有部分公司已开发出全自动袋包装机,实现了套袋等工作的全自动化,但通用性不够强。
46.目前市面上存在的吨袋外形特别是吊带外形多样,长短不一,市面上的半自动吨袋包装机基本上是人工挂袋后灌料称重,全自动吨袋包装机所使用吨袋都要特殊定制,很少厂家生产该类吨袋;市面上的全自动吨袋包装机都没有复秤功能,称重精度不够高;市面上的套袋机构要么过于复杂,需要专门的吨袋成卷机,占地空间大;要么采用工业机器人,过于昂贵。
47.下面结合图1-图13描述本实用新型的吨袋包装机。
48.如图1至3所示,本技术实施例提供了一种吨袋包装机,吨袋包装机包括料槽100、灌料装置200、取袋机构300、套袋机构400、第一称重件500、第二称重件600、过渡架700、升降组件800以及主机架900。
49.料槽100用于放置吨袋,吨袋上设置有标识1000,吨袋来料时是折叠状态放在料槽100内部的,且吨袋的吨袋口在上侧,吨袋口上面的标识1000为一长条形的色标,色标的宽度越窄在进行定位时能够越精准,吨袋上面的标识1000和吨袋口位置平行且居中,用来取袋时定位;灌料装置200,具有灌料口,用于对吨袋进行灌料,当吨袋承接在灌料口,灌料装置200将物料灌输至吨袋中进行装料;取袋机构300,能运动至料槽100上方并将料槽100内的吨袋取出并运送至第一位置,处于第一位置的吨袋开口张开;套袋机构400,配置为能够将吨袋从第一位置运送至第二位置,在第二位置,吨袋能够被套接于灌料口;第一称重件500,用于对第一次灌料之后的吨袋进行称重,第一称重件500具有第一预设值;第二称重件600,用于对吨袋进行二次称重,第二称重件600具有第二预设值;其中,第二预设值大于等于第一预设值;过渡架700,设置在灌料装置200的下方;升降组件800,配置为能够上升或下降以使过渡架700连接或脱离灌料装置200;主机架900,升降组件800设置在主机架900上。
50.需要理解的,第一称重件500和第二称重件600可以为电子秤,当然,在某些实施例中,第一称重件500和第二称重件600可以为称重传感器。
51.如图4所示,在一实施例中,灌料装置200包括称重架201、灌料管202、定袋夹爪203、挂钩204和灌料管升降气缸205,定袋夹爪203和挂钩204铰接在称重架201上,定袋夹爪203和挂钩204可通过外力打开或者闭合,灌料管202气缸固定在称重架201上,灌料管202连接灌料管202气缸。第一称重件500固定在主机架900上并能够抵接称重架201来进行测定数据。料机通过灌料管202对吨袋进行装料。
52.如图11和图12所示,在一实施例中,过渡架700包括主体701、挂环702和底梁703,挂环702设置在主体701的顶部,挂环702设置两个,底梁703设置主体701的底端,主体701与底梁703连接呈门型。通过设置过渡架700可以有效地对吨袋进行称重。
53.结合图1和13,在一实施例中,升降组件800包括升降架801、滚筒802、震动电机803和顶块804,滚筒802的转动由外部动力带动,滚筒802和顶块804均设置在升降架801的顶部且固定设置,震动电机803设置在升降架801的底部,其中,顶块804设置在升降架801的两端。震动电机803工作能够带动升降架801以及设置在升降架801上的各个部件动作。
54.结合图5和图6,在一实施例中,取袋机构300包括取袋x轴组件301、取袋y轴组件302、取袋z轴组件303、取袋α轴组件304以及取袋机架305,料槽100设置在取袋机架305上,取袋x轴组件301设置在取袋机架305上,取袋x轴组件301、取袋y轴组件302和取袋z轴组件303配合实现前后、左右和上下移动,取袋x轴组件301、取袋y轴组件302以及取袋z轴组件303组成一个三轴机械手结构,只需要理解能够在三个方向运动即可,该运动也为常规三轴运动,因此不对具体结构做详细说明。取袋α轴组件304固定在取袋z轴组件303的末端,取袋α轴组件304能够带动与其旋转端连接的零部件实现旋转动作,取袋α轴组件304连接有过渡座306,过渡座306的底端连接有压板307,压板307上设置有上吸盘308;
55.在取袋机架305上设置有水平板309,水平板309与压板307位置相对,水平板309上设置有缩回气缸310,缩回气缸310的气缸杆上连接有下吸盘311,下吸盘311与上吸盘308相对设置,上吸盘308与下吸盘311都设置有自带弹簧的伸缩机构,确保吸盘可以和吨袋口完
全接触。需要理解的是,上吸盘308与下吸盘311均外接有气泵来实现吸盘对吨袋的吸取。
56.在一实施例中,压板307的两端设置有摆动气缸312和取袋夹爪313,取袋夹爪313连接摆动气缸312,摆动气缸312能动作使得取袋夹爪313将吨袋压紧在压板307上。相应地,压板307的两端设置有两个摆动气缸312和取袋夹爪313,从吨袋口的两侧将吨袋压紧到压板307的两端。
57.进一步地,压板307上设置有测距传感器314以及标识传感器315,标识传感器315在压板307上等位设置三个,其中,处于两端的两个标识传感器315之间的距离与标识1000的长度相同。在进行吸袋时,当压板307到达可吸袋的位置,测距传感器314能够发出信号。标识传感器315能够检测到标识1000,使得压板307能够运动至吨袋的正上方,使得吸盘能够精准吸袋。
58.结合图7至图10,在一实施例中,套袋机构400包括提升组件410、翻转组件420和夹袋组件430,翻转组件420设置在提升组件410上,夹袋组件设置在翻转组件420上。夹袋组件430用于夹取吨袋,提升组件410用于将夹取后的吨袋提升,翻转组件420能够翻转吨袋,使得吨袋能够对准灌料口,提升组件410和翻转组件420能够使得吨袋精准运动至吨袋口。
59.具体的,提升组件410包括套袋固定架411、提升气缸412、滑轨413、滑块414以及升降板415,提升气缸412设置在套袋固定架411一侧并连接升降板415,滑轨413设置在套袋固定架411上,升降板415通过滑块414滑动设置在滑轨413上,提升气缸412的伸缩动作能够带动升降板415在套袋固定架411上面上下移动;
60.翻转组件420包括翻转气缸421、翻转轴422、翻转臂423、摆臂424以及连接座425,连接座425连接升降板415,同时,连接座425也连接升降气缸,翻转气缸421设置在升降板415上,翻转轴422通过翻转臂423连接翻转气缸421,翻转轴422的两端通过轴承426以及安装座427,设置在升降板415上,摆臂424设置在翻转轴422上且连接夹袋组件430,翻转气缸421伸缩能够带动转轴转动,进而带动夹袋组件430转动,在设置时,夹袋组件430的转动角度为90度;
61.进一步地,夹袋组件430包括外夹爪431、内夹爪432、第一连杆433、第二连杆434、开合气缸435以及缓冲器436,摆臂424、外夹爪431、内夹爪432、第一连杆433以及第二连杆434彼此之间铰接,摆臂424设置两个以连接两个外夹爪431,开合气缸435连接第二连杆434,两个摆臂424之间设置有支撑板437,开合气缸435设置在支撑板437上,第一连杆433一端连接内夹爪432,其另一端连接第二连杆434,两个内夹爪432和两个外夹爪431在开合气缸435的带动下能够对吨袋的袋口夹紧。
62.动作过程为:吨袋来料时是折叠状态放在料槽100内部的,且吨袋口上侧,吨袋口有一长条形色标和吨袋口平行并居中,用来取袋时定位。
63.初始状态时,取袋z轴组件303位于料槽100的上端,并且偏离色标靠近吨袋口的一侧。开始动作后,取袋z轴组件303下降,当测距传感器314显示并且反馈压板307和吨袋口达到指定距离时,取袋z轴组件303停止动作,取袋x轴组件301带动取袋z轴组件303向吨袋口的色标方向移动,直到中部的标识传感器315感应到色标。如果此时两侧标识传感器315都有亮起,则表明此时压板307和下方的吨袋口时对正的,可以直接执行取袋动作;如果此时两侧色标传感器有一个亮起,则通过取袋取袋x轴组件301和取袋y轴组件302联动,带动取袋z轴组件303向未亮灯标识传感器315一侧移动,直至其亮起;如果两侧标识传感器315都
未亮起,需要通过取袋α轴组件304微调一定角度,直至两侧的标识传感器315中有一个亮起,然后再执行前述动作。当压板307和下方吨袋口对正后,取袋z轴组件303下降,直至测距传感器314显示并反馈压板307已经到达可吸袋位置,上吸盘308动作,吸住吨袋口,然后取袋z轴组件303提升一定距离,摆动气缸312带动取袋夹爪313旋转并将吨袋口夹紧在压板307上,确保后期拖曳过程中吨袋不会脱离或移位。然后取袋x轴组件301、取袋y轴组件302和取袋z轴组件303三轴联动将吨袋送至水平板309上方的开袋口位置,此时,取袋z轴组件303带动压板307下降,在运动至使得下吸盘311正好可以吸住吨袋口的位置时停止。下吸盘311吸住吨袋口下方,吨袋口张开,摆动气缸312带动取袋夹爪313反向旋转,然后取袋z轴组件303上升至套袋机构400夹袋所需求的高度,此时袋口张开一定幅度,等待夹袋动作。
64.夹袋过程:初始状体时,提升气缸412为伸出状态,翻转气缸421为缩回且泄气状态,摆臂424因为缓冲器436作用会偏离夹袋组件430一定距离,保证其不干涉夹袋组件430对吨袋的袋口执行张开动作。当取袋组件完成对袋口的张开动作后,翻转气缸421的活塞杆侧充气,活塞杆完全缩回,内夹爪432插入吨袋口的内侧,外夹爪431位于吨袋口外侧,然后开合气缸435伸出,带动内夹爪432向外张开和外夹爪431一起夹紧吨袋口。同时,上吸盘308的气泵和下吸盘311的气泵泄气将不再对吨袋吸取,取袋z轴组件303返回料槽100的上端取料位置,缩回气缸310带动下吸盘311下降至水平板309下方,使其后期不与吨袋发生摩擦,完成取袋动作;然后,翻转组件420执行翻转动作,翻转气缸421伸出,通过翻转臂423带动外夹爪431和内夹爪432旋转90
°
,此时,吨袋口处于灌料管202的正下方,提升气缸412缩回,带动升降板415运动,进而带动吨袋口上升套入灌料管202。
65.提升组件410将吨袋套在灌料管202上后,定袋夹爪203闭合,将吨袋固定在灌料管202上。开合气缸435泄气,灌料管升降气缸205伸出,使得内夹爪432从吨袋口内部脱离,然后开合气缸435再次伸出,带动内夹爪432张开,张开后完全和吨袋口错开,翻转气缸421缩回,带动内外夹爪431返回夹袋位置。外部进行吹气胀袋。同时外部的托盘输送机构也将托盘输送到吨袋正下方,此时升降组件800位于原始位置;
66.升降架801通过顶块804顶住底梁703带动过渡架700,滚筒802带动托盘运动到一定高度,使得挂环702正好在挂钩204能够穿过的位置,挂钩204在外力作用下闭合,外力作用可以是人手施加,升降架801下降一定距离,过渡架700通过挂环702完全挂在挂钩204上,吨袋底部和托盘的上部接触,托盘的底部和底梁703上部接触,顶块804脱离底梁703;
67.开始灌料和称重过程,此过程中,为了防止吨袋内物料过于蓬松,升降架801会提升一定距离,通过滚筒802将托盘顶离底梁703,使得吨袋和托盘不和过渡架700接触,然后震动电机803启动,将吨袋内的物料震实,工作完成后升降架801下降回原位等待下次震实动作;
68.当第一称重件500反馈灌料达到第一预设值后,升降架801提升,顶块804将过渡架700顶起,滚筒802将托盘和满料吨袋顶起。然后将定袋夹爪203和挂钩204打开,升降架801带着过渡架700、托盘和满料吨袋下降到吨袋口和灌料管202还未完全脱离的位置,吨袋底部和托盘上部接触、托盘底部和底梁703上部接触,底梁703和第二称重件600接触,顶块804脱离底梁703;
69.开始通过第二称重件600对满料吨袋复秤,并按照复秤数据通过灌料管202往吨袋内部灌料直至达到第二称重件600设置的第二预设值;升降架801上升,回归到初始位置,然
后通过滚筒802转动带动托盘和满料吨袋移动至外部输送线,准备下一次灌料动作。
70.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1