一种筒仓无人定量装车控制装置的制作方法
1.本实用新型涉及无人装车技术领域,具体为一种筒仓无人定量装车控制装置。
背景技术:
2.无人装车是指没有人为控制的装车系统,能够对装料车辆进行定位,对装料车辆的车仓位置进行掌握,将物料进行装车,现有的无人定量装车控制装置在实际使用过程中,装料车辆开到下料口底部进行装料,装到一定程度靠驾驶人员的感觉进行移动车辆继续装料,物料会在一个地方堆积过高造成装料不匀,其次粉尘较大,造成环境污染。
技术实现要素:
3.(一)解决的技术问题
4.本实用新型的目的在于提供一种筒仓无人定量装车控制装置,以解决上述背景技术中提出装料不匀,粉尘较大,污染环境的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:一种筒仓无人定量装车控制装置,包括主体机构、定位提醒机构和装料车辆,所述定位提醒机构位于主体机构的上端;
7.所述主体机构包括固定底座、地磅、支撑板、物料存储仓、控制器,地磅固定设置在固定底座的中部,支撑板固定安装在固定底座的上端,物料存储仓固定安装在支撑板上端的中部,支撑板与物料存储仓的下料口的对应位置开设有通孔,控制器固定安装在支撑板的后端,地磅电性连接控制器,物料存储仓的上端设置有进料口;
8.所述定位提醒机构包括放置槽、雷达检测接受器、雷达检测发送器、提示灯、语音播报器,放置槽固定设置在所述固定底座内部右端的后端,雷达检测接受器固定安装在放置槽的左端,雷达检测发送器固定安装在装料车辆车头上端的中部,提示灯固定安装在装料车辆车头后端的上端,语音播报器固定安装在装料车辆车头前端的中部,雷达检测接受器与雷达检测发送器电性连接,雷达检测接受器、提示灯、语音播报器均与控制器电性连接。
9.优选的,所述筒仓无人定量装车控制装置还包括降尘结构,所述降尘机构固定在主体机构的车辆入口端,降尘机构包括蓄水箱、水泵、抽水软管、排水管、高压泵和雾化喷头,蓄水箱固定安装在支撑板上端的右端,水泵固定安装在蓄水箱的上端,抽水软管固定安装在水泵的上端,抽水软管连接水泵的进水端,排水管固定连接水泵的出水端,排水管的末端位于蓄水箱的内部,控制器电性连接水泵,连接管一的一端延伸至蓄水箱的内部,连接管一另一端固定安装在高压泵的进水端,连接管二的一端固定连接高压泵的出水端, 连接管二的另一端连接雾化喷头。
10.优选的,所述固定底座的前端设有进口斜坡,后端设有出口斜坡,方便车辆进出。
11.优选的,所述降尘机构还包括液位传感器,所述液位传感器固定安装在蓄水箱内部的左端,液位传感器电性连接控制器,当蓄水箱内的液位达到预警位置时,液位传感器传
输信号至控制器,对水泵进行开关控制。
12.与现有技术相比,本实用新型的有益效果是:
13.1、该筒仓无人定量装车控制装置,通过安装地磅,车辆通过驶入地磅上,地磅会对车辆称重值系统根据最大载重,车厢长宽自动计算堆数并通知驾驶员移动车辆,直至所有料堆都装好且车货总重达到预定计算值,装车均匀;
14.2、该筒仓无人定量装车控制装置,通过降尘机构,对车辆周围的粉尘进行湿降,减少工作环境的污染。
附图说明
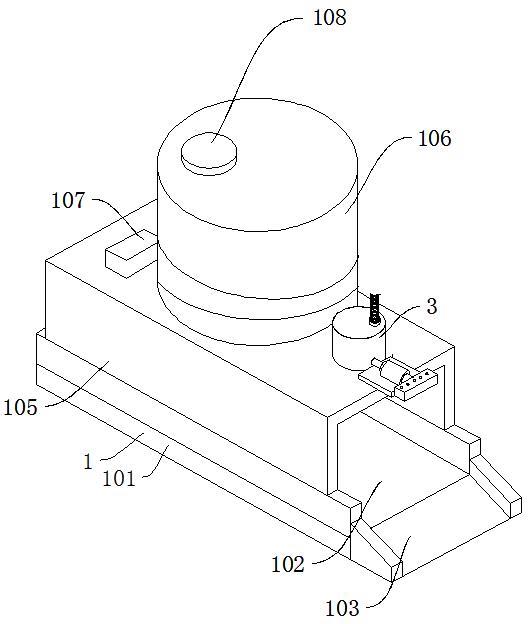
15.图1为本实用新型立体结构示意图;
16.图2为本实用新型固定底座立体结构示意图;
17.图3为本实用新型装料车车头提醒机构部分安装结构示意图;
18.图4为本实用新型降尘机构剖面结构示意图;
19.图5为本实用新型定位提醒机构局部细节放大结构示意图;
20.图6为本实用新型定位提醒机构局部细节放大结构示意图;
21.图中:1、主体机构;101、固定底座;102、地磅;103、进口斜坡;104、出口斜坡;105、支撑板;106、物料存储仓;107、控制器;108、进料口; 2、定位提醒机构;201、放置槽;202、雷达检测接受器;203、车仓;204、车头;205、雷达检测发送器;206、提示灯;207、语音播报器;3、降尘机构;301、蓄水箱;302、水泵;303、抽水软管;304、排水管;305、液位传感器;306、雾化喷头;307、高压泵;308、连接管一;309、连接管二。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-图6,本实用新型提供一种技术方案:一种筒仓无人定量装车控制装置,包括主体机构1、定位提醒机构2和装料车辆,所述定位提醒机构2位于主体机构1的上端;
24.所述主体机构1包括固定底座101、地磅102、进口斜坡103、出口斜坡104、支撑板105、物料存储仓106、控制器107、进料口108,地磅102固定设置在固定底座101的中部,进口斜坡103固定安装在固定底座101的前端,出口斜坡104固定安装在固定底座101的后端,支撑板105固定安装在固定底座101的上端,物料存储仓106固定安装在支撑板105上端的中部,支撑板105与物料存储仓106的下料口的对应位置开设有通孔,控制器107固定安装在支撑板105的后端,地磅102电性连接控制器107,物料存储仓106的上端设置有进料口108;
25.所述定位提醒机构2包括放置槽201、雷达检测接受器202、雷达检测发送器205、提示灯206、语音播报器207,放置槽201固定设置在所述固定底座101内部右端的后端,雷达检测接受器202固定安装在放置槽201的左端,雷达检测发送器205固定安装在需装料车车头204上端的中部,提示灯206固定安装在装料车辆车头204后端的上端,语音播报器207固定
安装在装料车辆车头204前端的中部,雷达检测接受器202与雷达检测发送器205电性连接,雷达检测接受器202、提示灯206、语音播报器207均与控制器107电性连接,驾驶人员驾驶需装料车车辆通过进口斜坡103驶入地磅102内,雷达检测发送器205随着装料车辆车头204的移动靠近雷达检测接受器202,当雷达检测发送器205位置与雷达检测接受器202平行时,雷达检测接受器202将信号发送至控制器107,控制器107将控制启动提示灯206与语音播报器207,使车仓203正对着物料存储仓106的下料口,提示灯206能够发出红灯,语音播报器207提醒驾驶人员停车。
26.进一步的,所述筒仓无人定量装车控制装置还包括降尘机构3,所述降尘机构3固定在主体机构1的车辆入口端,降尘机构3包括蓄水箱301、水泵302、抽水软管303、排水管304、液位传感器305、高压泵307、连接管一308、连接管二309和雾化喷头306,蓄水箱301固定安装在所述支撑板105的车辆入口端,水泵302固定安装在蓄水箱301的上端,抽水软管303固定安装在水泵302的上端,抽水软管303固定连接水泵302的进水端,排水管304固定连接水泵302的出水端,排水管304的末端位于蓄水箱301的内部,液位传感器305固定安装在蓄水箱301内部的一侧,液位传感器305电性连接控制器107,控制器107电性连接水泵302,连接管一308的一端固定连接高压泵307的进水端,连接管一308的另一端延伸至蓄水箱301的内部,连接管二309的一端固定连接高压泵307的出水端, 连接管二309的另一端端连接雾化喷头306。
27.工作原理:首先在使用时,驾驶人员驾驶装料车辆通过进口斜坡103驶入地磅102内,雷达检测发送器205随着装料车辆车头204的移动靠近雷达检测接受器202,当雷达检测发送器205位置与雷达检测接受器202平行时,雷达检测接受器202将信号发送至控制器107,控制器107将控制启动提示灯206与语音播报器207,使装料车辆车仓203正对着物料存储仓106的下料口,提示灯206能够发出红灯,语音播报器207提醒驾驶人员停车,车辆停滞在地磅102上,地磅102对车辆进行称重,系统根据最大载重,车厢长宽自动计算待补充堆数,装满一堆后地磅102将车辆重量发送至控制器107,控制器107控制启动语音播报器207,语音播报器207提示驾驶人员驾驶车辆前移,直至所有堆都装好且车货总重达到预定计算值即完成装车。
28.当需要降尘时,启动高压泵307,高压泵307的连接管一308将蓄水箱301内水抽取至连接管二309后输送至雾化喷头306转化为雾状对附近降尘,当蓄水箱301内水位不足时,液位传感器305对蓄水箱301内水位监测低于预先设定阈值,液位传感器305将信号发送至控制器107,控制器107控制启动水泵302,水泵302通过抽水软管303将水抽取至排水管304后注入蓄水箱301,蓄水箱301内水位合适后,液位传感器305将信号发送至控制器107,控制器107关闭水泵302停止抽取即可。
29.最后应当说明的是,以上内容仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,本领域的普通技术人员对本实用新型的技术方案进行的简单修改或者等同替换,均不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1