出料机械手的制作方法
1.本实用新型属于机械自动化设备技术领域,尤其涉及一种出料机械手。
背景技术:
2.目前打火机在生产时需要采用多种工序进行组装,且由人工作业完成。导致需要占用的生产面积大,浪费了土地资源;使用人工数量众多,效率不高,产能与良率不高,零部件浪费耗损率大;整个工厂生产线结构分散,人员众多管理困难,经营成本巨大,因此需要一种便于自动化组装打火机的设备。该设备在工作过程中,需要将若干的吸管锌套组进行分距后通过机械手抓取进入下一个工位进行打火机的装配,但是目前的机械手不适用于抓取吸管锌套组。
技术实现要素:
3.本实用新型的目的是针对上述问题,提供一种设计合理,便于抓取吸管锌套组的出料机械手。
4.为达到上述目的,本实用新型采用了下列技术方案:本出料机械手,其特征在于,包括机械手支架,所述的机械手支架上设有夹爪驱动器安装座,所述的夹爪驱动器安装座通过横移组件和竖移组件与机械手支架相连,在夹爪驱动器安装座上设有若干沿水平方向分布的夹爪驱动器,所述的夹爪驱动器与两个对称设置的夹爪相连,在夹爪上设有锌套夹取限位结构。
5.在上述的出料机械手中,所述的夹爪驱动器为气爪缸,所述的气爪缸的两个爪臂分别与两个夹爪相连,夹爪上端与爪臂相连,所述的夹爪下端上设有所述锌套夹取限位结构。
6.在上述的出料机械手中,所述的锌套夹取限位结构包括设置在夹爪下端内侧上的第一锌套夹槽。
7.在上述的出料机械手中,所述的夹爪下方设有锌套夹块,在锌套夹块内侧设有第二锌套夹槽,所述的第二锌套夹槽位于第一锌套夹槽下方内侧。
8.在上述的出料机械手中,所述的锌套夹块与夹爪连为一体。
9.在上述的出料机械手中,所述的夹爪通过夹爪座与爪臂相连,所述的夹爪夹爪座连为一体,所述的夹爪呈z字形。
10.在上述的出料机械手中,所述夹爪座与爪臂通过螺栓相连。
11.在上述的出料机械手中,所述的横移组件包括固定在机械手支架上的横移座,在横移座上设有轴移槽,在轴移槽内设有丝杆和螺套,在螺套两侧设有能够防止螺套周向转动的限位侧翼,所述的限位侧翼与横移座滑动连接,所述的螺套上固定有横移滑块,所述的横移滑块上设置有竖移组件,在竖移组件与横移滑块之间设有固定在横移座上的加固板。
12.在上述的出料机械手中,所述的竖移组件包括与横移滑块相连的竖移连接座,所述的竖移连接座通过滑台气缸与夹爪驱动器安装座相连。
13.在上述的出料机械手中,所述的夹爪驱动器安装座上设有五个沿水平方向分布的夹爪驱动器。
14.与现有的技术相比,本出料机械手的优点在于:1、设计合理,便于抓取吸管锌套组。2、能够有效的防止吸管锌套组的位移,从而使得装配更为快速。3、提高了生产效率,降低了损耗率。
附图说明
15.图1是本实用新型提供的使用场景图。
16.图2是本实用新型提供的结构示意图。
17.图3是图1中a处的放大结构示意图。
18.图4是图3中b处的放大结构示意图。
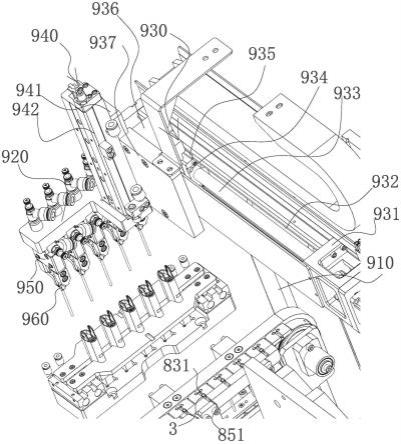
19.图中,出料机械手900、机械手支架910、夹爪驱动器安装座920、横移组件930和竖移组件940、夹爪驱动器950、夹爪960、锌套夹取限位结构970、第一锌套夹槽971、锌套夹块961、第二锌套夹槽962、夹爪座963、爪臂951、横移座931、轴移槽932、丝杆933、螺套934、限位侧翼935、横移滑块936、加固板937、竖移连接座941、滑台气缸942.
具体实施方式
20.下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
21.如图1-4所示,本出料机械手900包括机械手支架910,机械手支架910上设有夹爪驱动器安装座920,夹爪驱动器安装座920通过横移组件930和竖移组件940与机械手支架910相连,在夹爪驱动器安装座920上设有若干沿水平方向分布的夹爪驱动器950,夹爪驱动器950与两个对称设置的夹爪960相连,在夹爪960上设有锌套夹取限位结构970。
22.更具体的说,夹爪驱动器950为气爪缸,在气爪缸上连接有气缸和控制器,气爪缸的两个爪臂951分别与两个夹爪960相连,夹爪960上端与爪臂951相连,夹爪960下端上设有所述锌套夹取限位结构970,锌套夹取限位结构970包括设置在夹爪960下端内侧上的第一锌套夹槽971,夹爪960下方设有锌套夹块961,在锌套夹块961内侧设有第二锌套夹槽962,第二锌套夹槽962位于第一锌套夹槽971下方内侧。
23.即两个第二锌套夹槽962合围的区域大于两个第一锌套夹槽971合围的区域,第二锌套夹槽962合围的区域用于夹紧锌套小端,第一锌套夹槽971合围的区域用于夹紧锌套大端。
24.作为优选地,锌套夹块961的厚度小于夹爪960的厚度,从而能够便于锌套夹块961进入第二夹爪伸入槽851和第一夹爪伸入槽831,第二夹爪伸入槽851和第一夹爪伸入槽831之间设置有待夹取的吸管锌套组3,吸管锌套组3包括吸管2和已经装配在吸管2上的锌套1,吸管2和锌套1横截面均呈t形且具有中心孔,第二夹爪伸入槽851和第一夹爪伸入槽831的宽度小于锌套1的直径。
25.作为优选地,锌套夹块961与夹爪960连为一体。
26.夹爪960通过夹爪座963与爪臂951相连,夹爪960夹爪座963连为一体,夹爪960呈z字形,夹爪座963与爪臂951通过螺栓相连。
27.为了保障移动时的稳定性,横移组件930包括固定在机械手支架910上的横移座
931,在横移座931上设有轴移槽932,在轴移槽932内设有丝杆933和螺套934,在螺套934两侧设有能够防止螺套周向转动的限位侧翼935,限位侧翼935与横移座931滑动连接,螺套934上固定有横移滑块936,横移滑块936上设置有竖移组件940,在竖移组件940与横移滑块936之间设有固定在横移座931上的加固板937,竖移组件940包括与横移滑块936相连的竖移连接座941,竖移连接座941通过滑台气缸942与夹爪驱动器安装座920相连。
28.本技术中,夹爪驱动器安装座920上设有五个沿水平方向分布的夹爪驱动器950。
29.使用时,夹爪驱动器安装座920通过横移组件930和竖移组件940调整位置,从而使得夹爪960能够处于需要的位置后,通过夹爪驱动器950控制夹爪960的抓放,两侧的第一锌套夹槽971用于夹取锌套1防止其径向脱离夹爪960,两块锌套夹块961用于防止锌套1轴向向下脱离夹爪960。
30.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
31.尽管本文较多地使用了出料机械手900、机械手支架910、夹爪驱动器安装座920、横移组件930和竖移组件940、夹爪驱动器950、夹爪960、锌套夹取限位结构970、第一锌套夹槽971、锌套夹块961、第二锌套夹槽962、夹爪座963、爪臂951、横移座931、轴移槽932、丝杆933、螺套934、限位侧翼935、横移滑块936、加固板937、竖移连接座941、滑台气缸942等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1