容器取还装置及搬运机器人的制作方法
本技术涉及智能仓储设备,尤其是涉及一种容器取还装置及搬运机器人。
背景技术:
1、本部分提供的仅仅是与本实用新型相关的背景信息,其并不必然是现有技术。
2、搬运机器人也称为料箱机器人,其在仓储物流系统中扮演着重要角色。仓库商品种类繁多,料箱型号大小不一,传统的料箱机器人存在取箱型号单一的缺陷,这一缺陷直接影响着仓储机器人的作业效率和仓库的存储密度与利用率。
技术实现思路
1、本实用新型的目的是至少解决现有料箱机器人取箱型号单一的问题。该目的是通过以下技术方案实现的:
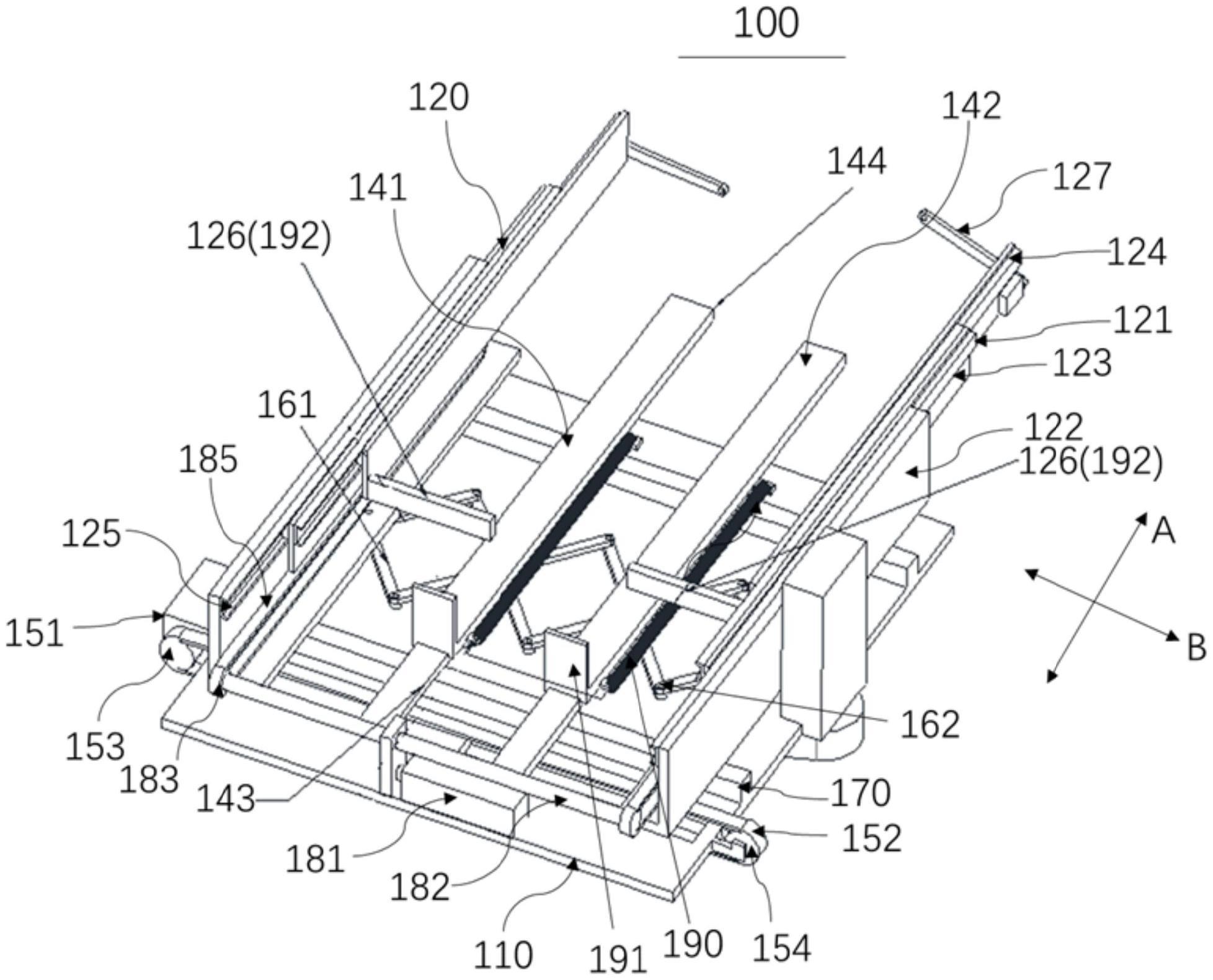
2、本实用新型的第一方面提出了一种容器取还装置,包括:
3、基座;
4、伸缩叉组件,设置于所述基座上,所述伸缩叉组件包括沿第一方向相对设置的第一伸缩叉和第二伸缩叉,所述第一伸缩叉和所述第二伸缩叉分别沿第二方向伸缩,所述第一方向垂直于所述第二方向;
5、调节机构,设置于所述基座上,所述调节机构与所述第一伸缩叉和所述第二伸缩叉两者中的一者或两者连接,用于调整所述第一伸缩叉与所述第二伸缩叉之间沿所述第一方向的间隔距离;
6、容器承托组件,设置于所述基座上,包括沿所述第一方向依次设置的第一承托件和第二承托件,所述第一承托件和/或所述第二承托件在所述第一方向上的位置可调。
7、根据本实用新型的容器取还装置,通过调节机构可以调整第一伸缩叉和第二伸缩叉沿第一方向的距离,使得第一伸缩叉和第二伸缩叉可以根据容器尺寸调节至与容器匹配;通过调节第一承托件和第二承托件在第一方向的位置,可以承载不同尺寸的容器,从而使得容器取还装置能够取还不同尺寸、不同型号的容器。采用本实用新型容器取还装置的搬运机器人,可以对不同型号的容器进行搬运,在一个仓储系统中,不需要根据容器型号设置多种搬运机器人,搬运机器人的种类减少后,搬运机器人的数量相应减少,搬运机器人需要占用空间减少,提高了仓储空间的利用率;同时,由于不同型号的容器可采用同一种搬运机器人搬运,也提高了搬运机器人的使用率和作业效率。
8、另外,根据本实用新型的容器取还装置,还可具有如下附加的技术特征:
9、在本实用新型的一些实施例中,所述调节机构包括两组第一驱动组件,其中一组所述第一驱动组件与所述第一伸缩叉连接,以驱动所述第一伸缩叉沿第一方向移动,另一组所述第一驱动组件与所述第二伸缩叉连接,以驱动所述第二伸缩叉沿第一方向移动;或
10、所述调节机构包括一组第一驱动组件,所述第一驱动组件与所述第一伸缩叉和所述第二伸缩叉两者中至少一者连接,以驱动所述第一伸缩叉与所述第二伸缩叉沿第一方向相对移动。
11、在本实用新型的一些实施例中,所述第一驱动组件包括动力器和传动构件,所述动力器与所述传动构件的输入端连接,所述传动构件的输出端与所述第一伸缩叉和/或所述第二伸缩叉连接;
12、所述传动构件包括滚珠丝杠构件、同步带构件、链条构件或连杆构件。
13、在本实用新型的一些实施例中,所述第一驱动组件的数量为一组,所述第一驱动组件包括第一电机、第一同步带、第一驱动带轮和第一从动带轮,所述第一电机与所述第一驱动带轮连接,所述第一同步带绕设在所述第一驱动带轮和所述第一从动带轮上;
14、所述第一同步带具有第一部分和第二部分,所述第一部分与所述第二部分分别设置于所述第一驱动带轮的两侧,所述第一伸缩叉与所述第一部分连接,所述第二伸缩叉与所述第二部分连接;
15、所述第一电机转动驱动第一驱动带轮带动所述第一部分和所述第二部分移动,以使所述第一伸缩叉和所述第二伸缩叉同步相向或相背沿所述第一方向移动。
16、在本实用新型的一些实施例中,所述第一承托件与所述第一伸缩叉和所述第二伸缩叉两者中能够沿所述第一方向移动的一者连接,以使所述第一承托件与所述第一伸缩叉或所述第二伸缩叉沿所述第一方向联动;
17、和/或
18、所述第二承托件与所述第一伸缩叉和所述第二伸缩叉两者中能够沿所述第一方向移动的一者连接,以使所述第二承托件与所述第一伸缩叉或所述第二伸缩叉沿所述第一方向联动。
19、在本实用新型的一些实施例中,所述第一承托件和所述第二承托件位于所述第一伸缩叉和所述第二伸缩叉之间,且所述第一承托件位于所述第二承托件靠近所述第一伸缩叉的一侧;
20、所述第一伸缩叉与所述第一承托件连接,以使所述第一承托件与所述第一伸缩叉在第一方向上联动,所述第二承托件与所述第二伸缩叉连接,以使所述第二承托件与所述第二伸缩叉在所述第一方向上联动。
21、在本实用新型的一些实施例中,所述容器取还装置还包括第一连杆组件和第二连杆组件,所述第一伸缩叉通过所述第一连杆组件与所述第一承托件连接,所述第二伸缩叉通过所述第二连杆组件与所述第二承托件连接。
22、在本实用新型的一些实施例中,所述第一连杆组件和所述第二连杆组件相互靠近的一端铰接连接,以使所述第一承托件和所述第二承托件联动。
23、在本实用新型的一些实施例中,所述第一连杆组件和第二连杆组件均包括多对连杆对,每对所述连杆对中的两根所述连杆交叉铰接,所述多对连杆对沿所述第一方向依次设置,且其中一对所述连杆对中的一根连杆与相邻的所述连杆对中的其中一根连杆铰接,其中一对所述连杆对中的另一根连杆与相邻所述连杆对中的另一根连杆铰接;
24、所述第一连杆组件中的远离所述第二连杆组件的连杆对与所述第一伸缩叉连接,所述第二连杆组件中的远离所述第一连杆组件的连杆对与所述第二伸缩叉连接,所述第一连杆组件中与所述第二连杆组件中相互靠近的所述连杆对的两根连杆一一对应铰接;
25、所述第一连杆组件中其中一对所述连杆对的两根所述连杆的铰接位置与所述第一承托件连接,第二连杆组件中其中一对所述连杆对的两根所述连杆的铰接位置与所述第二承托件连接。
26、在本实用新型的一些实施例中,所述基座上设置有至少一根导向轨,所述导向轨沿所述第一方向延伸,所述第一伸缩叉和/或所述第二伸缩叉通过第一滑动配合部与所述导向轨滑动配合,所述第一承托件和/或所述第二承托件通过第二滑动配合部与所述导向轨滑动配合。
27、在本实用新型的一些实施例中,所述第一承托件和所述第二承托件分别包括导向部和滑动部,所述导向部和所述滑动部均沿所述第二方向延伸,所述滑动部设置于所述导向部上,且所述滑动部能够在所述导向部上沿所述第二方向滑动;
28、所述容器取还装置还包括第二驱动组件,所述第二驱动组件设置于所述基座上,并与所述滑动部连接,所述第二驱动组件用于驱动所述滑动部沿所述第二方向向前伸出。
29、在本实用新型的一些实施例中,所述第一伸缩叉和/或所述第二伸缩叉设置有第一推动件,所述滑动部设置有第二推动件,所述第一推动件设置于所述第二推动件沿所述滑动部的伸出路径的前侧,且所述第一推动件能够与所述第二推动件抵接;
30、在所述第一伸缩叉和/或所述第二伸缩叉沿所述第二方向回缩时,所述第一推动件同步移动并推动所述第二推动件使所述滑动部向后回缩。
31、在本实用新型的一些实施例中,所述基座上设置有第一限位部,所述滑动部上设置有第二限位部,所述第一限位部设置于所述第二限位部沿所述滑动部伸出路径的前侧,且所述第一限位部能够与所述第一限位部抵接,以限制所述滑动部沿所述第二方向向前伸出的最大行程。
32、在本实用新型的一些实施例中,所述第一承托件和所述第二承托件均包括至少一根承托杆,所述承托杆沿所述第二方向延伸。
33、在本实用新型的一些实施例中,所述容器取还装置还包括伸缩驱动组件,所述伸缩驱动组件与所述第一伸缩叉和所述第二伸缩叉连接,用于驱动所述第一伸缩叉和所述第二伸缩叉沿所述第一方向伸缩。
34、在本实用新型的一些实施例中,所述第一伸缩叉上和所述第二伸缩叉上分别设置有伸缩驱动带轮;
35、所述伸缩驱动组件包括伸缩驱动电机、伸缩传动轴和两伸缩传动件,所述伸缩驱动电机与所述伸缩传动轴连接,所述伸缩传动轴沿所述第一方向延伸,两所述伸缩传动件均套设于所述伸缩传动轴上,两所述伸缩传动件分别能够沿所述伸缩传动轴的轴向移动,且所述伸缩传动件与所述伸缩传动轴在周向上相对固定;
36、所述第一伸缩叉的伸缩驱动带轮与两所述伸缩传动件中的其中一个连接,所述第二伸缩叉的伸缩驱动带轮与两所述伸缩传动件中的另一个连接。
37、在本实用新型的一些实施例中,所述伸缩传动轴为花键轴,所述伸缩传动件为花键母。
38、本实用新型的第二方面,提出了一种搬运机器人,包括:
39、底盘组件;
40、升降机构,设置在所述底盘组件上;
41、容器取还装置,与所述升降机构连接,并能够在所述升降机构的作用下沿竖直方向升降,所述容器取还装置为本实用新型第一方面提出的容器取还装置。
42、另外,根据本实用新型的容器取还装置,还可具有如下附加的技术特征:
43、在本实用新型的一些实施例中,所述搬运机器人还包括旋转机构,所述旋转机构与所述容器取还装置连接,用于驱动所述容器取还装置绕竖直轴线转动。
44、根据本实用新型的搬运机器人,通过调节机构可以调整第一伸缩叉和第二伸缩叉沿第一方向的距离,使得第一伸缩叉和第二伸缩叉可以根据容器尺寸调节至与容器匹配;通过调节第一承托件和第二承托件在第一方向的位置,可以承载不同尺寸的容器,从而使得搬运机器人能够取还不同尺寸、不同型号的容器。由于本实用新型搬运机器人可以对不同型号的容器进行搬运,相应的在一个仓储系统中,不需要根据容器型号设置多种搬运机器人,搬运机器人的种类减少后,搬运机器人的数量相应减少,搬运机器人需要占用空间减少,提高了仓储空间的利用率;同时,由于不同型号的容器可采用同一种搬运机器人搬运,也提高了搬运机器人的使用率和作业效率。
- 还没有人留言评论。精彩留言会获得点赞!