一种建筑垃圾清运车的制作方法
1.本实用新型涉及垃圾清运技术领域,具体为一种建筑垃圾清运车。
背景技术:
2.目前房地产交易中,二手房交易占据大半,而买来二手房之后第一件事就是装修,装修时则会产生大量的建筑垃圾,然而大部分上个世纪60年代至00年之间的楼房是没有电梯的,这类没有电梯的房子装修时产生的建筑垃圾,只能靠装修工人用垃圾袋装好后人工搬运下楼,再靠小推车搬运至小区的垃圾堆放点,整个清理过程中,将垃圾搬下楼的过程劳动强度大,而且效率低,鉴于此,我们提出一种减轻工人劳动强度并提升垃圾清运效率的建筑垃圾清运车。
技术实现要素:
3.为了弥补以上不足,本实用新型提供了一种建筑垃圾清运车。
4.本实用新型的技术方案是:
5.一种建筑垃圾清运车,包括框架,所述框架包括背部框架和底部框架,所述框架上方设有料斗,所述料斗用于盛放建筑垃圾,所述背部框架背面设有扶手组件,所述底部框架底部设置有运动组件;
6.一种建筑垃圾清运车,还包括支撑组件,所述支撑组件沿竖直方向穿过背部框架向下延伸,用于固定驱动组件和爬楼组件;
7.驱动组件,所述驱动组件通过齿轮传动结构与爬楼组件连接,用于给爬楼组件提供动力;
8.爬楼组件,所述爬楼组件用于攀爬楼梯。
9.作为本实用新型的优选技术方案,所述背部框架和底部框架通过背部框架底部的横梁相连接且相互垂直,背部框架的顶部和底部框架的头部通过斜拉柱固定连接,三者形成一个稳定的三角形。
10.作为本实用新型的优选技术方案,所述扶手组件包括两个扶手,两个所述扶手的头部分别固定安装在背部框架的左上角和右上角,两个所述扶手之间且位扶手中部固定安装有横杆,所述横杆中部固定安装有开关,所述开关通过导线与驱动组件连接用于控制驱动组件。
11.作为本实用新型的优选技术方案,支撑组件包括两个立柱,所述立柱顶部于背部框架上横梁连接,底部穿过背部框架下横梁设有支撑架,所述支撑架用于安装齿轮传动结构并为爬楼组件提供支撑,两个所述立柱之间且位于框架下横梁上设有电机底座,两个所述立柱之间且位于电机底座上方设有固定梁,所述电机底座和固定梁用于安装驱动组件。
12.作为本实用新型的优选技术方案,所述驱动组件包括安装于固定梁上的电池,所述电池下方且位于电机底座上安装有电机,电池通过导线与电机连接,用于给电机供电,所述驱动组件通过电机与传动结构连接。
13.作为本实用新型的优选技术方案,所述爬楼组件共有两个,每个所述爬楼组件包括三个支撑足,所述支撑足彼此之间呈120度夹角通过固定环连接连接,所述支撑足顶部固定安装有防滑圈,所述防滑圈可以在支撑足支撑在地面上时防止滑动。
14.作为本实用新型的优选技术方案,所述运动组件包括安装于底部框架底端左侧上下两边的支架,每个所述支架上固定安装有轮轴,所述轮轴顶端通过轴承安装有轮胎,所述轮胎可以在轮轴顶端转动。
15.与现有技术相比,本实用新型的有益效果是:
16.本实用新型,通过设置驱动装置和爬楼装置,可以实现建筑垃圾清运车自动爬楼梯,减轻了工人的劳动强度,增加了垃圾清运的速率。
附图说明
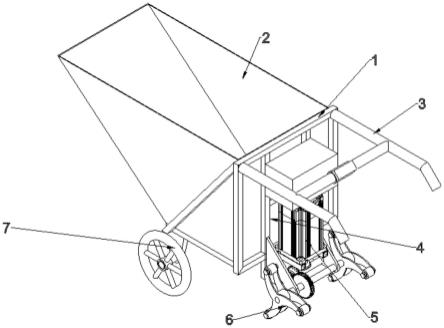
17.图1为本实用新型中整体结构示意图;
18.图2为本实用新型中框架及扶手组件结构示意图;
19.图3为本实用新型中支撑组件及运动组件结构示意图;
20.图4为本实用新型中驱动组件及爬楼组件结构示意图。
21.图中各个标点符号的意义为:
22.1、框架;11、背部框架;12、底部框架;13、斜拉柱;
23.2、料斗;
24.3、扶手组件;31、扶手;32、横杆;33、开关;
25.4、支撑组件;41、立柱;42、固定梁;43、电机底座;44、支撑架;
26.5、驱动组件;51、电池;52、电机;53、伞型齿轮a;54、伞型齿轮b(54);55、输出齿轮;56、输出齿轮轴;57、减速齿轮轴;58、减速齿轮;
27.6、爬楼组件;61、支撑足;62、固定环;63、防滑圈;
28.7、运动组件;71;支架;72、轮轴;73、轮胎。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.请参阅图1-4,本实用新型通过以下实施例来详述上述技术方案:
32.一种建筑垃圾清运车,包括框架1,框架1包括背部框架11和底部框架12,背部框架11和底部框架12通过背部框架11底部的横梁相焊接在一起且相互垂直,背部框架11的顶部和底部框架12的头部通过斜拉柱13焊接连接,框架1上方设有料斗2,料斗2的底部焊接在底
部框架12上,料斗2的背部焊接在背部框架11上,料斗2用于盛放建筑垃圾。
33.背部框架11、底部框架12和斜拉柱13之间形成了一个的三角形,三角形具有稳定性不易变形。
34.背部框架11背面设有扶手组件3扶手组件3包括两个扶手31,两个扶手31的头部分别焊接安装在背部框架11的左上角和右上角,两个扶手31之间且位扶手31中部焊接安装有横杆32,横杆32中部固定安装有开关33,开关33通过导线与驱动组件5连接用于控制驱动组件5。
35.底部框架12底部设置有运动组件7,述运动组件7包括焊接安装于底部框架12底端左侧上下两边的支架71,每个支架71上固定安装有轮轴72,轮轴72顶端通过轴承安装有轮胎73,轮胎73可以在轮轴72顶端转动,从而实现垃圾清运车前后运动。
36.建筑垃圾清运车还包括支撑组件4,支撑组件4沿竖直方向穿过背部框架11向下延伸,用于固定驱动组件5和爬楼组件6。
37.支撑组件4包括两个立柱41,立柱41顶部于背部框架11上横梁焊接连接,底部穿过背部框架11下横梁焊接有支撑架44,支撑架44用于安装齿轮传动结构并为爬楼组件6提供支撑,两个立柱41之间且位于背部框架11下横梁上设有电机底座43,两个立柱41之间且位于电机底座43上方设有固定梁42,电机底座43和固定梁42用于安装驱动组件5。
38.述驱动组件5包括安装于固定梁42上的电池51,电池51下方且位于电机底座43上通过螺栓安装有电机52,电池51通过导线与电机52连接,用于给电机52供电,驱动组件5通过电机52与传动结构连接。
39.补充说明,开关33包括三个按键,开关键、上楼模式和下楼模式,开关33通过导线与电池51和电机52连接,开关33通过闭合或者断开控制电路闭合或者断开,从而控制电机52是否转动,开关33的上楼模式和下楼模式的电流方向不同,开关33通过控制电流方向来控制电机52转动方向。
40.齿轮传动结构包括水平安装于电机52转轴顶部的伞型齿轮a53,伞型齿轮a53下方竖直设有伞型齿轮b54,伞型齿轮b54左侧设有输出齿轮55,伞型齿轮b54和输出齿轮55固定安装在输出齿轮轴56上,输出齿轮轴56两端通过轴承安装在支撑架44上,输出齿轮55外侧啮合有减速齿轮58,减速齿轮58固定安装在减速齿轮轴57上,减速齿轮轴57通过轴承安装在支撑架44上,减速齿轮轴57穿过支撑架44固定安装有爬楼组件6
41.电机52的转动会带动固定安装在电机52转轴顶部的伞型齿轮a53转动,由于伞型齿轮a53和伞型齿轮b54相互垂直,通过齿轮啮合可以将伞型齿轮a53的以x轴为转轴的转动转化为伞型齿轮b54以y轴为转动轴的转动,由于伞型齿轮b54和输出齿轮55固定安装在输出齿轮轴56上,所以伞型齿轮b54会带动输出齿轮轴56转动从而带动输出齿轮55转动,又因为输出齿轮55外侧啮合有减速齿轮58,减速齿轮58和爬楼组件6都固定安装在减速齿轮轴57上,所以输出齿轮55的转动会带动减速齿轮58转动,从而带动减速齿轮轴57转动,使得爬楼组件6转动。
42.爬楼组件6共有两个,每个所述爬楼组件6包括三个支撑足61,所述支撑足61彼此之间呈120度夹角通过固定环62焊接连接,所述支撑足61顶部通过螺栓安装有防滑圈63,所述防滑圈63可以在支撑足61支撑在地面上时防止滑动。
43.每个支撑足由两块钢板组成,三个支撑足61的顶端形成三角形,当每个爬楼组件6
都有两个支撑足61同时落地时,可以和轮胎73形成四个支撑点,稳定支撑垃圾清运车,由于防滑圈63固定安装在支撑足61顶部之间,在摩擦力的作用下可以防止垃圾清运车移动,在补充说明的是,爬楼组件6的最低点略高于轮胎73的最低点。
44.本实施例操作人员在使用此设备时,先将建筑垃圾放到料斗2,装满建筑垃圾后,工人可以抬起扶手31,由于爬楼组件6的最低点略高于轮胎73的最低点,所以当扶手31水平时,爬楼组件6不会阻碍垃圾清运车运动,当推到楼梯处时,先将轮胎73推下第一阶台阶,此时爬楼组件6的三个支撑足61的其中两个会支撑在第一阶台阶上,再压低扶手31,以爬楼组件6为支点,由于杠杆原理轮胎73会被抬离台阶悬空。
45.按动开关33,电池51给电机52通电,开关33选择下楼模式,电机52会逆针转动,从而带动爬楼组件6逆时针转动,未接触地面的支撑足61会旋转向下,接触地面的两个支撑足61中靠右的那个支撑足61会旋转向上,随着爬楼组件6旋转原本最上方的支撑足61会越过第一阶台阶降低到第二阶台阶,爬楼组件6接续旋转原本在第一阶台阶支撑的两个支撑足61会转到最上方,整个清运车靠最下方的支撑足61支撑,完成了从第一阶台阶到第二阶台阶的运动。
46.重复上述运动直到到走完全部台阶,然后关闭开关33,抬起抬高扶手31,以支撑足61为支点,使得轮胎73与地面接触,继续抬高扶手31使得爬楼组件6脱离地面,然后推动扶手使清运车向前运动,到达垃圾堆放点取出料斗2内的垃圾。
47.上楼时,人抓住扶手31背对楼梯站在台阶上,抬高并向后拉动扶手31,将组件6的两个支撑足61放到第一阶台阶上,按动开关33,电池51给电机52通电,开关33选择上楼模式,电机52会顺针转动从而带动爬楼组件6顺时针转动,位于最高点的支撑足61会顺指针旋转向下,然后搭到第二阶台阶上,随着旋转垃圾清运车会以搭在第二阶台阶上的支撑足61为支点向上运动,直到其他两个支撑足61完全脱离地面完成从第一阶台阶到第二阶台阶的运动,重复上述动作,最后完成整个上楼过程,当上楼最高层台阶后,然后关闭开关33,再缓慢抬起扶手31,使得轮胎73与地面接触,推动垃圾清运车进入房间。完成一次建筑垃圾清运过程。
48.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1