一种具备自动识别功能的智能机械手的制作方法
1.本实用新型涉及智能机械手技术领域,更具体地说,本实用新型涉及一种具备自动识别功能的智能机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,它可代替人的繁重劳动以实现生产的机械化和自动化,也常用于机械加工和制造。
3.现有的机械手在同一程序中,往往只能抓取相同大小或者相同距离的工件,后期需要人工进行调节,无法自动识别工件的远近,耗费时间和人力,功能性相对较低。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种具备自动识别功能的智能机械手,以解决现有的机械手在同一程序中,往往只能抓取相同大小或者相同距离的工件,后期需要人工进行调节,无法自动识别工件的远近,耗费时间和人力,功能性相对较低的问题。
5.为解决上述技术问题,本实用新型提供如下技术方案:一种具备自动识别功能的智能机械手,包括传送带,所述传送带的侧边固定安装有连接架,所述连接架的顶部活动安装有距离调节装置,所述距离调节装置的侧边固定安装有夹持头。
6.其中,所述连接架包括固定架,所述固定架固定安装在传送带的侧边,所述固定架的侧边固定安装有底座架,所述底座架的内部开设有滑动槽。
7.其中,所述距离调节装置包括伺服电机,所述伺服电机固定安装在底座架的侧边,所述伺服电机的侧边固定安装有转动螺杆,所述转动螺杆转动安装在底座架的内部,所述转动螺杆的外表面螺纹安装有滑动块,所述滑动块滑动安装在底座架的内部,所述滑动块的顶部固定安装有机械基座,所述机械基座的侧边固定安装有距离传感器,所述机械基座的顶部活动安装有夹持机械臂,所述夹持机械臂的侧边固定安装有夹持组件。
8.其中,所述夹持组件包括夹持架,所述夹持架的侧边开设有移动槽,所述夹持架的侧边固定安装有夹持驱动,所述夹持驱动的侧边固定安装有异向螺杆,所述异向螺杆转动安装在移动槽的内部,所述异向螺杆的两端活动套接有夹持块,所述夹持块的两端均固定安装有转动驱动,所述转动驱动的侧边固定安装有转动轴,所述转动轴的外表面固定套接有夹持板。
9.其中,所述转动驱动固定安装在夹持块侧边的两端,所述转动轴转动安装在夹持块两端的内部,所述夹持板转动安装在夹持块内部的两端。
10.本实用新型的技术效果和优点:
11.上述方案中,当工件在传送带的顶部传输到距离调节装置的侧边,经过距离传感器的侧边时,通过距离传感器对工件的识别,当识别装置与传送带的距离不同时,通过现有
的控制系统,控制伺服电机带动转动螺杆进行正向或者反向转动,使滑动块在滑动槽的内部,向传送带的侧边进行移动,使夹持组件自动调节到工件合理的位置,进行抓取,自动进行调节距离抓取,实现对不同大小的工件进行抓取,同时也可对不同远近距离的工件进行抓取,提高装置的功能性和实用性,同时抓取的范围更广;
12.当对不同的工件进行抓取时,通过夹持机械臂的作用,使夹持组件移动到工件的侧边,启动伺服电机使转动螺杆进行转动,从而实现夹持块相向移动对工件进行夹持,通过两端的转动驱动,使转动轴带动夹持板进行转动,使夹持组件可适应不同外形的工件,夹持更加稳定,使工件抓取更加稳固,提高装置的夹持性能,提高装置的性能。
附图说明
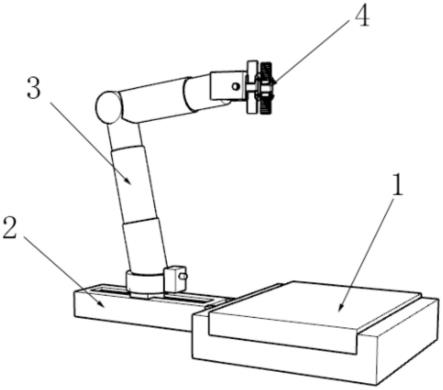
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型的连接架结构示意图;
15.图3为本实用新型的距离调节装置底部结构示意图;
16.图4为本实用新型的距离调节装置上端结构示意图;
17.图5为本实用新型的夹持组件结构示意图。
18.附图标记为:1、传送带;2、连接架;3、距离调节装置;4、夹持头;21、固定架;22、底座架;23、滑动槽;31、伺服电机;32、转动螺杆;33、滑动块;34、机械基座;35、距离传感器;36、夹持机械臂;37、夹持组件;371、夹持架;372、移动槽;373、夹持驱动;374、夹持块;375、转动驱动;376、转动轴;377、夹持板;378、异向螺杆。
具体实施方式
19.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
20.如附图1至附图5,本实用新型的实施例提供一种具备自动识别功能的智能机械手,包括传送带1,传送带1的侧边固定安装有连接架2,连接架2的顶部活动安装有距离调节装置3,距离调节装置3的侧边固定安装有夹持头4。
21.其中,连接架2包括固定架21,固定架21固定安装在传送带1的侧边,固定架21的侧边固定安装有底座架22,底座架22的内部开设有滑动槽23,设置滑动槽23,对滑动块33进行限位,使滑动块33在转动螺杆32转动的作用下,在底座架22的内部进行移动。
22.其中,距离调节装置3包括伺服电机31,伺服电机31固定安装在底座架22的侧边,伺服电机31的侧边固定安装有转动螺杆32,转动螺杆32转动安装在底座架22的内部,转动螺杆32的外表面螺纹安装有滑动块33,滑动块33滑动安装在底座架22的内部,滑动块33的顶部固定安装有机械基座34,机械基座34的侧边固定安装有距离传感器35,机械基座34的顶部活动安装有夹持机械臂36,夹持机械臂36的侧边固定安装有夹持组件37,设置距离传感器35,使伺服电机31通过内部系统控制伺服电机31的正反转向,从而控制转动螺杆32的正反转动,实现滑动块33的距离的移动。
23.其中,夹持组件37包括夹持架371,夹持架371的侧边开设有移动槽372,夹持架371的侧边固定安装有夹持驱动373,夹持驱动373的侧边固定安装有异向螺杆378,异向螺杆378转动安装在移动槽372的内部,异向螺杆378的两端活动套接有夹持块374,夹持块374的
两端均固定安装有转动驱动375,转动驱动375的侧边固定安装有转动轴376,转动轴376的外表面固定套接有夹持板377,设置移动槽372,对夹持块374进行限位,使异向螺杆378在夹持架371的内部进行转动时,夹持块374在移动槽372的内部进行移动,从而实现对工件的夹持,同时,通过设置的转动轴376和夹持板377,实现对工件夹持时的角度调节,实现对不同外形的工件夹持。
24.其中,转动驱动375固定安装在夹持块374侧边的两端,转动轴376转动安装在夹持块374两端的内部,夹持板377转动安装在夹持块374内部的两端。
25.本实用新型的工作过程如下:
26.当工件在传送带1的顶部传输到距离调节装置3的侧边,经过距离传感器35的侧边时,通过距离传感器35对工件的识别,当识别装置与传送带1的距离不同时,通过现有的控制系统,控制伺服电机31带动转动螺杆32进行正向或者反向转动,使滑动块33在滑动槽23的内部,向传送带1的侧边进行移动,使夹持组件37自动调节到工件合理的位置,进行抓取,自动进行调节距离抓取;
27.当对不同的工件进行抓取时,通过夹持机械臂36的作用,使夹持组件37移动到工件的侧边,启动伺服电机31使转动螺杆32进行转动,从而实现夹持块374相向移动对工件进行夹持,通过两端的转动驱动375,使转动轴376带动夹持板377进行转动,使夹持组件37可适应不同外形的工件,夹持更加稳定。
28.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
29.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
30.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1