门窗打胶用自动翻转上下料装置的制作方法
:
1.本实用新型涉及门窗打胶设备技术领域,具体涉及门窗打胶用自动翻转上下料装置。
背景技术:
2.目前,对于门窗打胶主要依靠门窗打胶机来完成,门窗打胶机能够实现对门窗自动打胶,相比于人工打胶显著提高门窗打胶效率。虽然现有门窗打胶机打胶实现了机械化和自动化,但对于门窗的上料、下料、翻转以及码垛等外围工作依然采用人工完成,这无疑成为制约门窗打胶行业进一步发展的关键因素。
3.现有技术为了进一步提高门窗打胶的效率,开始对上料、下料、翻转等工作进行研制自动化的设备,比如现有技术中普遍采用真空吸盘抓取门窗,然后实现门窗的上料和下料,又如现有技术中设计了专门的翻转机构替代人工翻转,然后人工上下料或与真空吸盘结合进行上下料,现有技术已经从单一的方向着手替代人工,现有技术的改进促进了门窗打胶行业的发展。但纵观现有技术改进,都无法同时实现上料、下料、翻转和码垛的自动化。为了彻底解决现有发展瓶颈,有必要设计一种高度集成化和自动化的装置,以期实现自动上料、下料、翻转和码垛,显著提高门窗打胶效率。
4.需要说明的是,上述内容属于发明人的技术认知范畴,并不必然构成现有技术。
技术实现要素:
5.本实用新型的目的在于解决现有技术所存在的问题,提供门窗打胶用自动翻转上下料装置,具有结构设计合理、机械化程度高、集成化程度高、抓取可靠、打胶效率高等优点。
6.本实用新型通过采取以下技术方案实现上述目的:
7.门窗打胶用自动翻转上下料装置,包括机架,所述机架上设有三平动结构,所述三平动结构末端设有抓取结构,所述抓取结构包括吸盘抓取机构和边框抓取机构,所述吸盘抓取机构通过吸附玻璃抓取门窗,所述边框抓取机构通过边框抓取门窗,所述三平动结构带动抓取结构搬运门窗,所述机架一侧设有门窗翻转结构。
8.所述机架包括间隔设置的四根立柱,所述立柱下端设有地脚板,横向设置的两个立柱上端设有横梁,所述横梁上设有三平动结构。
9.所述三平动结构包括设置在横梁上的横向导轨,所述横向导轨上设有横移架,所述横移架上设有横向减速电机,所述横向减速电机连接有横向齿轮,所述横向齿轮与设置在横梁上的横向齿条啮合,所述横移架上纵向设有纵向导轨,所述纵向导轨上设有纵向滑座,所述纵向滑座上设有纵向减速电机,所述纵向减速电机连接有纵向齿轮,所述纵向齿轮与设置在横移架上的纵向齿条啮合,所述纵向滑座上竖向设有立座,所述立座上竖向设有竖向滑块,所述竖向滑块上设有竖向导轨,所述竖向导轨上设有竖向滑梁,所述竖向滑梁从横移架中间穿过,所述纵向滑座上设有竖向减速电机,所述竖向减速电机连接有竖向齿轮,
所述竖向齿轮与设置在竖向滑梁上的竖向齿条啮合,所述竖向滑梁下端设有所述抓取结构。
10.所述横向减速电机设有输出轴a和输出轴b两个输出轴,所述输出轴a上设有横向齿轮a,所述横向齿轮a与其中一个横梁上的横向齿条a啮合,所述输出轴b通过联轴器与连接轴连接,所述连接轴端部设有横向齿轮b,所述横向齿轮b与另一个横梁上的横向齿条b啮合,所述横移架上间隔设有两个带座轴承a,所述连接轴安装在带座轴承a上。
11.所述抓取结构包括抓取大梁,所述抓取大梁两端分别设有抓取边梁,所述抓取边梁与抓取大梁垂直设置,所述抓取大梁中部两侧分别设有t型板,所述t 型板上端与竖向滑梁连接,所述抓取大梁中部一侧吸盘抓取机构,所述抓取边梁下端设有边框抓取机构。
12.所述吸盘抓取机构包括设置在抓取大梁上的气缸安装座,所述气缸安装座上竖向设有吸盘升降气缸,所述吸盘升降气缸连接有升降板,所述升降板上间隔设有两个竖向设置的真空吸盘,所述气缸安装座上间隔设有两个直线轴承a,所述升降板上间隔设有两导向轴a,所述导向轴a安装在直线轴承a上。
13.所述边框抓取机构包括设置在抓取边梁下端的抓取滑轨,所述抓取滑轨沿抓取边梁长度方向设置,所述抓取大梁两侧分别设有抓取滑动梁,所述抓取滑动梁两端分别通过抓取滑块安装在抓取滑轨上,所述抓取大梁上间隔设有两个抓取驱动气缸,每个抓取驱动气缸连接一抓取滑动梁,所述抓取驱动气缸驱动两个抓取滑动梁相向运动,所述抓取滑动梁上沿其长度方向间隔设有多个抓取夹爪,两所述抓取滑动梁之间设有协调同步机构。
14.所述协调同步机构包括分布在抓取大梁两侧的同步转轴,所述同步转轴两端分别设有带座轴承b,所述带座轴承b安装在抓取边梁端部,所述同步转轴一端设有同步链轮a,另一端设有同步链轮b,两个同步链轮a之间连接有同步链条a,两个同步链轮b之间连接有同步链条b,所述同步链条a和同步链条b的下半部上分别设有同步连接件a,两同步连接件a安装在其中一个抓取滑动梁上,所述同步链条a和同步链条b的上半部上分别设有同步连接件b,两同步连接件b分别安装在另一个抓取滑动梁上。
15.所述抓取夹爪包括安装在抓取滑动梁上的安装板,所述安装板上竖向设有升降滑块,所述升降滑块上设有升降滑轨,所述升降滑轨上设有竖板,所述竖板上端折弯设有感应板a,对应的所述抓取滑动梁上至少设有一接近开关a,所述竖板下端折弯设有平板,所述平板上设有垫板,所述竖板上沿垂直于抓取滑动梁方向设有直线轴承b,所述直线轴承b上设有导向轴b,所述导向轴b前端设有顶块,所述顶块与直线轴承b之间的导向轴b上设有弹簧,所述导向轴 b后端设有感应板b,对应的所述竖板上设有接近开关b,所述竖板上设有导向杆,所述感应板b套设在导向杆上。
16.所述翻转结构包括竖向设置在立柱上的升降导轨,所述升降导轨上设有升降滑座,所述升降滑座上设有带座轴承c,两所述带座轴承c上设有连接轴c,所述连接轴c一端通过联轴器与升降减速电机连接,另一端设有升降齿轮a,所述升降齿轮a与竖向设置在立柱上的升降齿条a啮合,所述升降减速电机连接有升降齿轮b,所述升降齿轮b与另一立柱上竖向设置的升降齿条b啮合,所述升降滑座上设有带座轴承d,所述带座轴承d上设有翻转转轴,两所述翻转转轴之间设有翻转梁,所述翻转梁上间隔设有两个翻转吸盘,其中一个翻转转轴通过联轴器与翻转减速电机连接,所述翻转减速电机设置在升降滑座上。
17.本实用新型采用上述结构,能够带来如下有益效果:
18.通过设计机架,在机架上设置三平动结构实现空间搬运运动,在三平动结构末端设置抓取结构实现吸盘抓取或边框抓取两种抓取方式,根据实际需求选择最佳抓取方式,在机架一侧设计翻转结构实现门窗翻转,通过设计抓取夹爪能够实现边框抓取的同时还能进行码垛,整体能够实现自动上料、下料、门窗翻转以及码垛。
附图说明:
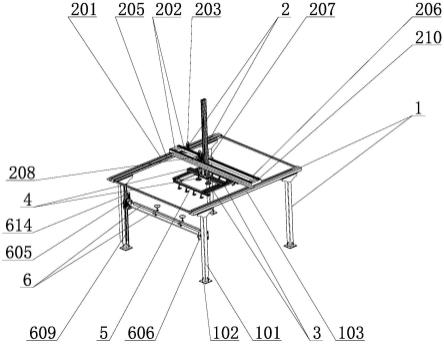
19.图1为本实用新型自动翻转上下料装置的立体结构示意图;
20.图2为本实用新型自动翻转上下料装置的结构示意图;
21.图3为本实用新型自动翻转上下料装置另一视角的结构示意图;
22.图4为本实用新型抓取结构的结构示意图;
23.图5为本实用新型吸盘抓取机构的结构示意图;
24.图6为本实用新型同步连接件a的安装示意图;
25.图7为本实用新型同步连接件b的安装示意图;
26.图8为本实用新型抓取夹爪的结构示意图;
27.图中,1、机架,101、立柱,102、地脚板,103、横梁,2、三平动机构, 201、横向导轨,202、横移架,203、横向减速电机,204、横向齿轮,205、横向齿条,206、纵向导轨,207、纵向滑座,208、纵向减速电机,209、纵向齿轮, 210、纵向齿条,211、立座,212、竖向滑块,213、竖向导轨,214、竖向滑梁,215、竖向减速电机,216、竖向齿轮,217、竖向齿条,218、输出轴a,219、输出轴b,220、横向齿轮a,221、横向齿条a,222、连接轴,223、横向齿轮 b,224、横向齿条b,225、带座轴承a,3、抓取结构,301、抓取大梁,302、抓取边梁,303、t型板,4、吸盘抓取机构,401、气缸安装座,402、吸盘升降气缸,403、升降板,404、真空吸盘,405、直线轴承a,406、导向轴a,5、边框抓取机构,501、抓取滑轨,502、抓取滑动梁,503、抓取滑块,504、抓取驱动气缸,505、抓取夹爪,5051、安装板,5052、升降滑块,5053、升降滑轨, 5054、竖板,5055、感应板a,5056、接近开关a,5057、平板,5058、垫板, 5059、直线轴承b,5060、导向轴b,5061、顶块,5062、弹簧,5063、感应板b, 5064、接近开关b,5065、导向杆,507、协调同步机构,5071、同步转轴,5072、带座轴承b,5073、同步链轮a,5074、同步链轮b,5075、同步链条a,5076、同步链条b,5077、同步连接件a,5078、同步连接件b,6、翻转结构,601、升降导轨,602、升降滑座,603、带座轴承c,604、连接轴c,605、升降减速电机,606、升降齿轮a,607、升降齿条a,608、升降齿轮b,609、升降齿条 b,610、带座轴承d,611、翻转转轴,612、翻转梁,613、翻转吸盘,614、翻转减速电机。
具体实施方式:
28.为了更清楚的阐释本实用新型的整体构思,下面结合说明书附图以示例的方式进行详细说明。
29.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用其他不同于在此描述的其他方式来实施,因此,本实用新型的保护范围并不受下面公开的具体实施例的限制。
30.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
31.此外,术语“横向”、“纵向”、“竖向”、“a”、“b”、“c”、“d”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的位置。
32.在本实用新型中,除非另有明确的规定和限定,术语“设有”、“设置”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
33.如图1-8所示,门窗打胶用自动翻转上下料装置,包括机架1,所述机架1 上设有三平动结构2,所述三平动结构2末端设有抓取结构3,所述抓取结构3 包括吸盘抓取机构4和边框抓取机构5,所述吸盘抓取机构4通过吸附玻璃抓取门窗,所述边框抓取机构5通过边框抓取门窗,所述三平动结构2带动抓取结构3搬运门窗,所述机架1一侧设有门窗翻转结构6。
34.所述机架1包括间隔设置的四根立柱101,所述立柱101下端设有地脚板 102,横向设置的两个立柱101上端设有横梁103,所述横梁103上设有三平动结构2。
35.所述三平动结构2包括设置在横梁103上的横向导轨201,所述横向导轨201 上设有横移架202,所述横移架202上设有横向减速电机203,所述横向减速电机203连接有横向齿轮204,所述横向齿轮204与设置在横梁103上的横向齿条 205啮合,所述横移架202上纵向设有纵向导轨206,所述纵向导轨206上设有纵向滑座207,所述纵向滑座207上设有纵向减速电机208,所述纵向减速电机 208连接有纵向齿轮209,所述纵向齿轮209与设置在横移架202上的纵向齿条 210啮合,所述纵向滑座207上竖向设有立座211,所述立座211上竖向设有竖向滑块212,所述竖向滑块212上设有竖向导轨213,所述竖向导轨213上设有竖向滑梁214,所述竖向滑梁214从横移架202中间穿过,所述纵向滑座207上设有竖向减速电机215,所述竖向减速电机215连接有竖向齿轮216,所述竖向齿轮216与设置在竖向滑梁214上的竖向齿条217啮合,所述竖向滑梁214下端设有所述抓取结构3。
36.所述横向减速电机203设有输出轴a218和输出轴b219两个输出轴,所述输出轴a218上设有横向齿轮a220,所述横向齿轮a220与其中一个横梁103上的横向齿条a221啮合,所述输出轴b219通过联轴器与连接轴222连接,所述连接轴222端部设有横向齿轮b223,所述横向齿轮b223与另一个横梁103上的横向齿条b224啮合,所述横移架202上间隔设有两个带座轴承a225,所述连接轴222安装在带座轴承a225上。
37.所述抓取结构3包括抓取大梁301,所述抓取大梁301两端分别设有抓取边梁302,所述抓取边梁302与抓取大梁301垂直设置,所述抓取大梁301中部两侧分别设有t型板303,所述t型板303上端与竖向滑梁214连接,所述抓取大梁301中部一侧吸盘抓取机构4,所述抓取边梁302下端设有边框抓取机构5。
38.所述吸盘抓取机构4包括设置在抓取大梁301上的气缸安装座401,所述气缸安装座401上竖向设有吸盘升降气缸402,所述吸盘升降气缸402连接有升降板403,所述升降板403上间隔设有两个竖向设置的真空吸盘404,所述气缸安装座401上间隔设有两个直线轴承a405,所述升降板403上间隔设有两导向轴 a406,所述导向轴a406安装在直线轴承a405上。
39.所述边框抓取机构5包括设置在抓取边梁302下端的抓取滑轨501,所述抓取滑轨501沿抓取边梁302长度方向设置,所述抓取大梁301两侧分别设有抓取滑动梁502,所述抓取滑动梁502两端分别通过抓取滑块503安装在抓取滑轨501 上,所述抓取大梁301上间隔
设有两个抓取驱动气缸504,每个抓取驱动气缸504 连接一抓取滑动梁502,所述抓取驱动气缸504驱动两个抓取滑动梁502相向运动,所述抓取滑动梁502上沿其长度方向间隔设有多个抓取夹爪505,两所述抓取滑动梁502之间设有协调同步机构507。
40.所述协调同步机构507包括分布在抓取大梁301两侧的同步转轴5071,所述同步转轴5071两端分别设有带座轴承b5072,所述带座轴承b5072安装在抓取边梁302端部,所述同步转轴5071一端设有同步链轮a5073,另一端设有同步链轮b5074,两个同步链轮a5073之间连接有同步链条a5075,两个同步链轮 b5074之间连接有同步链条b5076,所述同步链条a5075和同步链条b5076的下半部上分别设有同步连接件a5077,两同步连接件a5077安装在其中一个抓取滑动梁502上,所述同步链条a5075和同步链条b5076的上半部上分别设有同步连接件b5078,两同步连接件b5078分别安装在另一个抓取滑动梁502上。
41.所述抓取夹爪505包括安装在抓取滑动梁502上的安装板5051,所述安装板5051上竖向设有升降滑块5052,所述升降滑块5052上设有升降滑轨5053,所述升降滑轨5053上设有竖板5054,所述竖板5054上端折弯设有感应板a5055,对应的所述抓取滑动梁502上至少设有一接近开关a5056,所述竖板5054下端折弯设有平板5057,所述平板5057上设有垫板5058,所述竖板5058上沿垂直于抓取滑动梁502方向设有直线轴承b5059,所述直线轴承b5059上设有导向轴 b5060,所述导向轴b5060前端设有顶块5061,所述顶块5061与直线轴承b5059 之间的导向轴b5060上设有弹簧5062,所述导向轴b5060后端设有感应板b5063,对应的所述竖板5054上设有接近开关b5064,所述竖板5054上设有导向杆5065,所述感应板b5063套设在导向杆5065上。
42.所述翻转结构6包括竖向设置在立柱101上的升降导轨601,所述升降导轨 601上设有升降滑座602,所述升降滑座602上设有带座轴承c603,两所述带座轴承c603上设有连接轴c604,所述连接轴c604一端通过联轴器与升降减速电机605连接,另一端设有升降齿轮a606,所述升降齿轮a606与竖向设置在立柱 101上的升降齿条a607啮合,所述升降减速电机605连接有升降齿轮b608,所述升降齿轮b608与另一立柱101上竖向设置的升降齿条b609啮合,所述升降滑座602上设有带座轴承d610,所述带座轴承d610上设有翻转转轴611,两所述翻转转轴611之间设有翻转梁612,所述翻转梁612上间隔设有两个翻转吸盘 613,其中一个翻转转轴611通过联轴器与翻转减速电机614连接,所述翻转减速电机614设置在升降滑座602上。
43.本技术门窗打胶用自动翻转上下料装置使用说明:
44.实际使用时,需要将现有门窗打胶机设置在本技术机架1下方,同时需要配备相应的控制系统对本技术的气缸、电机进行控制运行,控制系统不是本技术的发明点,直接订购即可。
45.本技术的自动翻转上下料装置不仅可以给门窗正面打胶,也可以给门窗反面打胶。
46.正面打胶时,将尚未打胶的门窗码垛放置在机架1一侧,然后采用边框抓取机构5将门窗抓取(采用边框抓取机构能够有效避免玻璃垫片脱落),然后通过三平动结构2将门窗搬运到门窗打胶机上进行打胶,打胶完成后继续用边框抓取机构5将打胶后的门窗抓取搬运到机架另一侧(采用边框抓取机构可以确保密封胶不会因搬运产生松动),重复上面步骤即可实现多个门窗的依次正面打胶,正面打胶后的门窗码垛在一起,具体码垛过程为边
框抓取机构5抓取打胶后的门窗移动到已经放好的门窗上方,随着边框抓取机构5下降,平板5057与下方的门窗接触,随着继续下降下方的门窗将平板5057、竖板5054和感应板 a5055向上顶起(平板5057、竖板5054和感应板a5055是一体加工成型的),感应板a5055向上移会被接近开关a5056检测信号,控制系统接收信号发出指令,停止边框抓取机构5下降,抓取驱动气缸504动作驱动两抓取滑动梁502向外移动松开门窗,进而实现门窗码垛,将码垛好的门窗通过其他工具(比如叉车) 搬运到晾干处对正面打胶后的门窗进行晾干,晾干后进行反面打胶。
47.反面打胶时,首先将正面打胶后且晾干码垛好的门窗搬运到翻转结构6下方,然后启动翻转结构6逐一将门窗翻转过程(即尚未打胶的反面朝上),然后吸盘抓取机构4将翻转后的门窗吸附牢固并将其搬运到门窗打胶机上进行反面打胶(这里采用吸盘抓取机构4主要是与翻转结构6配合,具有占用空间小、抓取方便灵活的优点,因正面打胶已经晾干且密封牢固,故不会对密封造成不良影响),反面打胶完成后将通过边框抓取机构5将反面打胶后的门窗搬运到机架1另一侧,并进行码垛,进而完成门窗反面打胶。
48.上述具体实施方式不能作为对本实用新型保护范围的限制,对于本技术领域的技术人员来说,对本实用新型实施方式所做出的任何替代改进或变换均落在本实用新型的保护范围内。
49.本实用新型未详述之处,均为本技术领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1