具有自动换桶功能的垃圾屋的制作方法
1.本实用新型涉及垃圾屋技术领域,尤其涉及具有自动换桶功能的垃圾屋。
背景技术:
2.目前,在社区等场合均会设置垃圾回收站点,以收集居民在日常生活中所产生的垃圾,垃圾分类屋是用于分类收集居民垃圾的环保设备,在垃圾分类屋内设置有盛放垃圾的垃圾桶。例如中国实用新型专利cn202220815862.x公开了一种垃圾分类环保屋,包括收集屋,所述收集屋的内部设置有垃圾桶,所述垃圾桶的上端两侧内壁均转动连接有盖板,所述垃圾桶的两侧内壁且位于盖板的下方固定连接有导槽,所述导槽的内壁固定连接有弹簧,所述弹簧远离导槽的一端固定连接有滑块,所述滑块与盖板固定连接,所述收集屋的上表面固定连接有鼓风机,所述鼓风机的输出端固定连接有输送管,所述输送管的底端延伸至收集屋的内部,且固定连接有分流管,所述分流管的输出端设置有出风口,所述垃圾桶的内壁一侧设置有红外线传感器。
3.然而,上述专利公开的垃圾分类环保屋存在以下不足之处:用于盛装不同垃圾的垃圾桶分别只有一个,当垃圾桶内的垃圾装满后无法更换新的空桶,只能等待工作人员对垃圾桶进行清理后才可继续向垃圾桶内投放垃圾,在垃圾桶内的垃圾装满至工作人员前来清理垃圾的这段时间内,居民只得将垃圾扔至垃圾桶外,不仅造成现场环境的污染,而且给工作人员的清理工作带来极大不便。
技术实现要素:
4.有鉴于此,有必要提供一种具有自动换桶功能的垃圾屋,以解决现有技术中的垃圾屋在垃圾桶内的垃圾装满后无法更换新的空桶,所造成现场环境的污染,且给工作人员的清理工作带来极大不便的技术问题。
5.为达到上述技术目的,本实用新型的技术方案提供一种具有自动换桶功能的垃圾屋,包括屋体及换桶单元,所述换桶单元包括压力传感器、移动机构、放桶机构、第一垃圾桶、提桶机构及第二垃圾桶,所述提桶机构包括挂取件及第一升降组件,所述第一升降组件与所述挂取件传动连接,用于驱动所述挂取件对所述第一垃圾桶进行挂取提升,所述压力传感器设于所述屋体内,所述移动机构包括移动件及移动驱动组件,所述移动驱动组件与所述压力传感器的测压端连接,所述移动件设于所述移动驱动组件,所述第一垃圾桶置于所述移动件,所述移动驱动组件与所述移动件传动连接,用于驱动置于所述移动件的所述第一垃圾桶朝向所述挂取件移动,所述放桶机构包括承挂件及第二升降组件,所述第二升降组件与所述承挂件传动连接,用于驱动所述承挂件进行升降,所述第二垃圾桶托挂于所述承挂件。
6.在其中一个实施例中,所述提桶机构还包括第一支架,所述第一升降组件为直线油缸模组,所述直线油缸模组固设于所述第一支架,所述挂取件与所述直线油缸模组的活塞杆固接,所述挂取件为倒u形,所述倒u形的挂取件的相对内侧部设有第一承托部,所述第
一垃圾桶的桶口设有用于担放于所述第一承托部的第一托挂部。
7.在其中一个实施例中,所述提桶机构还包括第一上行程开关及第一下行程开关,所述第一上行程开关及所述第一下行程开关固设于所述第一支架,并分别与所述直线油缸模组电连接,所述第一上行程开关及所述第一下行程开关分别与所述挂取件相对应。
8.在其中一个实施例中,所述移动驱动组件包括支座、辊轴及第一电机,所述支座与所述压力传感器的测压端连接,所述辊轴转动设于所述支座,所述第一电机固设于所述支座,并与所述辊轴传动连接,所述移动件为传送带,所述传送带绕设于所述辊轴。
9.在其中一个实施例中,所述换桶单元还包括第一位置传感器及第二位置传感器,所述第一位置传感器及所述第二位置传感器分别与所述第一电机电连接,所述第一位置传感器设于所述移动件的前侧,所述第二位置传感器设于所述移动件的后侧。
10.在其中一个实施例中,所述放桶机构还包括第二支架,所述第二升降组件包括绕线盘、绳索及第二电机,所述绕线盘转动设于所述第二支架,所述第二电机固设于所述第二支架,并与所述绕线盘传动连接,所述绳索绕设于所述绕线盘,所述绳索的一端与所述绕线盘固接,所述绳索的另一端与所述承挂件固接。
11.在其中一个实施例中,所述放桶机构还包括第二上行程开关及第二下行程开关,所述第二上行程开关及所述第二下行程开关固设于所述第二支架,并分别与所述第二电机电连接,所述第二上行程开关及所述第二下行程开关分别与所述承挂件相对应,所述承挂件为倒u形,所述倒u形的承挂件的相对内侧部设有第二承托部,所述第二垃圾桶的桶口设有第二托挂部,所述第二垃圾桶通过第二托挂部担放挂设于所述第二承托部。
12.在其中一个实施例中,还包括门板及开闭驱动机构,所述屋体设有与所述第一垃圾桶相对应的垃圾投入口,所述门板铰接设于所述屋体,所述开闭驱动机构设于所述屋体,并与所述门板传动连接,用于驱动所述门板可开闭封堵于所述垃圾投入口。
13.在其中一个实施例中,所述屋体内部设有横担,所述开闭驱动机构包括驱动本体及伸缩件,所述驱动本体与所述伸缩件传动连接,用于驱动所述伸缩件相对于所述驱动本体伸缩移动,所述驱动本体与所述横担铰接,所述伸缩件与所述门板铰接。
14.在其中一个实施例中,还包括开闭传感器,所述开闭传感器固设于所述屋体的外侧壁,所述开闭传感器与所述开闭驱动机构电连接。
15.与现有技术相比,本实用新型具有以下有益效果:本实用新型的具有自动换桶功能的垃圾屋在使用时,居民可向第一垃圾桶内投放垃圾,通过压力传感器对第一垃圾桶的重量进行称量,当第一垃圾桶的重量达到上限值时,即第一垃圾桶内的垃圾装满时,通过移动机构的移动驱动组件驱动置于移动件的第一垃圾桶朝向挂取件移动,当第一垃圾桶移动至挂取件处时,通过提桶机构的第一升降组件驱动挂取件对第一垃圾桶进行挂取提升,使第一垃圾桶离开移动件,接着通过放桶机构的第二升降组件驱动承挂件及托挂于承挂件的第二垃圾桶下降,将第二垃圾桶置于移动件上,接着再通过移动驱动组件驱动移动件反向移动,将第二垃圾桶移动至第一垃圾桶的初始位置,接着居民即可向空的第二垃圾桶内投放垃圾,从而实现换桶功能,进而给工作人员留出充分的时间来清理装满垃圾的垃圾桶,避免现有的垃圾屋在垃圾桶内的垃圾装满后无法更换新的空桶,所造成现场环境的污染,且给工作人员的清理工作带来极大不便的技术问题。
附图说明
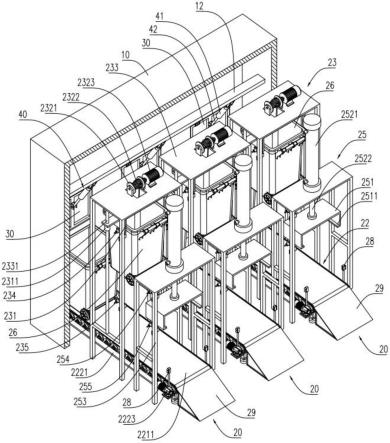
16.图1为本实用新型的示意图;
17.图2为本实用新型第一视角的剖视图;
18.图3为本实用新型第二视角的剖视图;
19.图4为换桶单元的示意图。
具体实施方式
20.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本技术一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
21.如图1至图4所示,本实用新型提供了一种具有自动换桶功能的垃圾屋,包括屋体10及换桶单元20,所述换桶单元20包括压力传感器21、移动机构22、放桶机构23、第一垃圾桶24、提桶机构25及第二垃圾桶26,所述提桶机构25包括挂取件251及第一升降组件252,所述第一升降组件252与所述挂取件251传动连接,用于驱动所述挂取件251对所述第一垃圾桶24进行挂取提升,所述压力传感器21设于所述屋体10内,所述移动机构22包括移动件221及移动驱动组件222,所述移动驱动组件222与所述压力传感器21的测压端连接,所述移动件221设于所述移动驱动组件222,所述第一垃圾桶24置于所述移动件221,所述移动驱动组件222与所述移动件221传动连接,用于驱动置于所述移动件221的所述第一垃圾桶24朝向所述挂取件251移动,所述放桶机构23包括承挂件231及第二升降组件232,所述第二升降组件232与所述承挂件231传动连接,用于驱动所述承挂件231进行升降,所述第二垃圾桶26托挂于所述承挂件231。
22.本实用新型的具有自动换桶功能的垃圾屋在使用时,居民可向第一垃圾桶24内投放垃圾,通过压力传感器21对第一垃圾桶24的重量进行称量,当第一垃圾桶24的重量达到上限值时,即第一垃圾桶24内的垃圾装满时,通过移动机构22的移动驱动组件222驱动置于移动件221的第一垃圾桶24朝向挂取件251移动,当第一垃圾桶24移动至挂取件251处时,通过提桶机构25的第一升降组件252驱动挂取件251对第一垃圾桶24进行挂取提升,使第一垃圾桶24离开移动件221,接着通过放桶机构23的第二升降组件232驱动承挂件231及托挂于承挂件231的第二垃圾桶26下降,将第二垃圾桶26置于移动件221上,接着再通过移动驱动组件222驱动移动件221反向移动,将第二垃圾桶26移动至第一垃圾桶24的初始位置,接着居民即可向空的第二垃圾桶26内投放垃圾,从而实现换桶功能,进而给工作人员留出充分的时间来清理装满垃圾的垃圾桶,避免现有的垃圾屋在垃圾桶内的垃圾装满后无法更换新的空桶,所造成现场环境的污染,且给工作人员的清理工作带来极大不便的技术问题。
23.在其中一个实施例中,所述换桶单元20还包括斜台29,所述移动驱动组件222包括支座2221、辊轴2222及第一电机2223,所述支座2221与所述压力传感器21的测压端连接,所述辊轴2222转动设于所述支座2221,所述第一电机2223固设于所述支座2221,并与所述辊轴2222传动连接,所述移动件221为传送带2211,所述传送带2211绕设于所述辊轴2222,所述传送带2211的两侧部分别设有限位凸台2212,所述限位凸台2212用于对置于所述移动件221的第一垃圾桶24进行限位。所述斜台29设于所述传送带2211的一端,用于第一垃圾桶24及第二垃圾桶26驶上或驶下所述传送带2211。
24.通过第一电机2223可驱动辊轴2222转动,通过辊轴2222可带动传送带2211运行,进而带动置于传送带2211上的第一垃圾桶24进行移动。
25.在其中一个实施例中,所述放桶机构23还包括第二支架233,所述第二升降组件232包括绕线盘2321、绳索2322及第二电机2323,所述第二支架233设有导杆2331,所述承挂件231设有导向套2311,所述导向套2311滑动套设于所述导杆2331,所述绕线盘2321转动设于所述第二支架233,所述第二电机2323固设于所述第二支架233,并与所述绕线盘2321传动连接,所述绳索2322绕设于所述绕线盘2321,所述绳索2322的一端与所述绕线盘2321固接,所述绳索2322的另一端与所述承挂件231固接。
26.通过第二电机2323可驱动绕线盘2321转动,通过绕线盘2321可带动绳索2322进行收放线,进而带动承挂件231进行升降。
27.在其中一个实施例中,所述放桶机构23还包括第二上行程开关234及第二下行程开关235,所述第二上行程开关234及所述第二下行程开关235固设于所述第二支架233,并分别与所述第二电机2323电连接,所述第二上行程开关234及所述第二下行程开关235分别与所述承挂件231相对应,所述承挂件231为倒u形,所述倒u形的承挂件231的相对内侧部设有第二承托部2312,所述第二垃圾桶26的桶口设有第二托挂部261,所述第二垃圾桶26通过第二托挂部261担放挂设于所述第二承托部2312。
28.通过第二上行程开关234及第二下行程开关235可对第二电机2323驱动承挂件231进行升降的行程进行限位。
29.在其中一个实施例中,所述提桶机构25还包括第一支架253,所述第一升降组件252为直线油缸模组2521,所述直线油缸模组2521固设于所述第一支架253,所述挂取件251与所述直线油缸模组2521的活塞杆2522固接,所述挂取件251为倒u形,所述倒u形的挂取件251的相对内侧部设有第一承托部2511,所述第一垃圾桶24的桶口设有用于担放于所述第一承托部2511的第一托挂部241。
30.当移动驱动组件222驱动置于移动件221的第一垃圾桶24移动至挂取件251处时,第一垃圾桶24的第一托挂部241正好处于第一承托部2511上方,接着通过第一升降组件252即可驱动挂取件251对第一垃圾桶24进行挂取提升,使第一垃圾桶24的底部离开移动件221。
31.在其中一个实施例中,所述提桶机构25还包括第一上行程开关254及第一下行程开关255,所述第一上行程开关254及所述第一下行程开关255固设于所述第一支架253,并分别与所述直线油缸模组2521电连接,所述第一上行程开关254及所述第一下行程开关255分别与所述挂取件251相对应。
32.通过第一上行程开关254及第一下行程开关255可对第一升降组件252驱动挂取件251进行升降的行程进行限位,第一上行程开关254及第一下行程开关255与直线油缸模组2521的电连接关系为本领域的公知常识,在此不必详述,第一上行程开关254及第一下行程开关255可采用接近开关。
33.在其中一个实施例中,所述换桶单元20还包括第一位置传感器27及第二位置传感器28,所述第一位置传感器27及所述第二位置传感器28分别与所述第一电机2223电连接,所述第一位置传感器27设于所述移动件221的前侧,所述第二位置传感器28设于所述移动件221的后侧。
34.第一位置传感器27及第二位置传感器28分别与第一垃圾桶24相对应,第一位置传感器27及第二位置传感器28可采用光电传感器,当第一电机2223驱动传送带2211对第一垃圾桶24进行移动时,通过第一位置传感器27及第二位置传感器28对第一垃圾桶24的移动行程进行限位。
35.在其中一个实施例中,还包括门板30及开闭驱动机构40,所述屋体10设有与所述第一垃圾桶24相对应的垃圾投入口11,所述门板30通过合页31铰接设于所述屋体10,所述开闭驱动机构40设于所述屋体10,并与所述门板30传动连接,用于驱动所述门板30可开闭封堵于所述垃圾投入口11。开闭驱动机构40的具体结构及与屋体10的连接关系如下:所述屋体10内部设有横担12,所述开闭驱动机构40包括驱动本体41及伸缩件42,所述驱动本体41与所述伸缩件42传动连接,用于驱动所述伸缩件42相对于所述驱动本体41伸缩移动,所述驱动本体41通过第一销轴411与所述横担12铰接,所述伸缩件42通过第二销轴421与所述门板30铰接,在本实施例中,开闭驱动机构40采用电动推杆组件。
36.通过开闭驱动机构40可驱动门板30进行开闭,当门板30打开时,居民可通过垃圾投入口11向位于屋体10内的第一垃圾桶24内投放垃圾。所述屋体10设有出入口13,出入口13用于工作人员出入屋体10,便于工作人员将第一垃圾桶24及第二垃圾桶26送入或送出屋体10。
37.在其中一个实施例中,还包括开闭传感器50,所述开闭传感器50固设于所述屋体10的外侧壁,所述开闭传感器50与所述开闭驱动机构40电连接。
38.开闭传感器50可采用光电传感器,当居民移动至门板30前准备丢垃圾时,开闭传感器50感应到人员接近,控制开闭驱动机构40驱动门板30打开,供居民通过垃圾投入口11向第一垃圾桶24内投放垃圾。
39.本实用新型的具有自动换桶功能的垃圾屋的工作原理如下:当居民移动至门板30前准备丢垃圾时,开闭传感器50感应到人员接近,控制开闭驱动机构40驱动门板30打开,供居民通过垃圾投入口11向第一垃圾桶24内投放垃圾。通过压力传感器21对第一垃圾桶24的重量进行称量,当第一垃圾桶24的重量达到上限值时,即第一垃圾桶24内的垃圾装满时,移动驱动组件222的第一电机2223启动,通过第一电机2223驱动辊轴2222转动,通过辊轴2222带动传送带2211运行,带动置于传送带2211上的第一垃圾桶24朝向挂取件251移动,当第一垃圾桶24移动至第二位置传感器28处时,第二位置传感器28控制第一电机2223停止,此时第一垃圾桶24的第一托挂部241正好处于第一承托部2511上方,接着通过第一升降组件252驱动挂取件251上升,对第一垃圾桶24进行挂取提升,使第一垃圾桶24的底部离开移动件221,当挂取件251上升至第一上行程开关254处时,第一上行程开关254控制第一升降组件252停止。接着放桶机构23的第二电机2323启动,通过第二电机2323驱动绕线盘2321转动,通过绕线盘2321带动绳索2322放线,带动承挂件231及挂设于第二承托部2312的第二垃圾桶26下降,将第二垃圾桶26放置于传送带2211上,接着承挂件231继续下降一小段距离并到达第二下行程开关235时,通过第二下行程开关235控制第二电机2323停止。接着移动驱动组件222的第一电机2223启动,并驱动辊轴2222反转,通过辊轴2222带动传送带2211反向运行,带动置于传送带2211上的第二垃圾桶26朝向垃圾投入口11移动,当第二垃圾桶26移动至第一位置传感器27处时,通过第一位置传感器27控制第一电机2223停止,此时第二垃圾桶26正好位于垃圾投入口11后方,从而完成换桶操作,接着居民即可向空的第二垃圾桶26
内投放垃圾。
40.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1