一种拾取袋装面包的机械手
1.本实用新型涉及机械手技术领域,具体是涉及一种拾取袋装面包的机械手。
背景技术:
2.在面包运输与装箱过程中需要通过夹取装置对袋装面包进行大批量的拾取与安放,专利号为cn201820030563.9的中国实用新型公开了一种成品面包真空吸附功能的面包网夹,通过真空吸附的上下板夹实现对面包的吸取,同时对多个面包进行分拣。但是由于传送带运输过程中袋装面包摆放位置不同,有可能不同时处于同一条水平线上,这样导致面包网夹不能同时夹取多个面包,同时工厂生产的袋装面包大小不一,无法通过调节机械手实现对不同大小面包的拾取。
技术实现要素:
3.本实用新型提供一种拾取袋装面包的机械手,其目的在于解决当多个面包不处于同一水平线上时,现有机械手不能同时夹取多个面包,拾取种类单一和运动不灵活不足,通过设计一款拾取袋装面包的机械手,实现对传送带上不同数量面包、不同大小的面包的拾取。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种拾取袋装面包的机械手,该结构由固定连接的拾取结构与基座组成,拾取结构中的支架方管上端固定于基座上,下端固定有正反牙滚珠丝杠装置的支撑端轴承座和固定端轴承座,支撑端轴承座和固定端轴承座之间轴承连接丝杠,丝杠穿过固定端轴承座的一端与第二直流有刷电机轴端连接,第二直流有刷电机固定于支架方管上;丝杠的正反螺纹上均螺纹连接有螺母,螺母固定于方形的螺母座内,螺母座上固定连接第一有刷直流电机,第一有刷直流电机轴端连接旋转管件,旋转管件上通过真空吸盘座固定有多个真空吸盘。
6.进一步的,丝杠中间无螺纹的距离大于旋转管件长度。
7.进一步的,基座为并联机构,包括静平台和动平台,动平台连接支架方管上端,静平台和动平台之间连接有中央驱动支链和三个相同的边缘驱动支链;边缘驱动支链由第二球铰副、伺服电缸和第一球铰副组成,伺服电缸底部连接第二球铰副,第二球铰副固定于静平台上,伺服电缸的推杆前端连接球铰副,第一球铰副固定于动平台上;中央驱动支链包括虎克铰、伺服电缸、滚动轴承和转轴,伺服电缸底部端面通过转轴与滚动轴承连接,滚动轴承固定在静平台的几何中心位置上方,伺服电缸的推杆前端与虎克铰下支座固定连接,虎克铰的上支座与动平台表面几何中心位置固定连接。
8.进一步的,三条边缘驱动支链与动平台的连接处到动平台1几何中心位置的距离都相等,且两相邻边缘驱动支链与动平台的连接处到动平台几何位置中心连线所组成的夹角β为120
°
;三条边缘驱动支链的下端与静平台的连接处到静平台几何中心位置的距离都相等,且两相邻边缘驱动支链与静平台的连接处到静平台几何中心连线所组成的夹角β为
120
°
。
9.进一步的,初始安装条件下边缘驱动支链与静平台之间的夹角α=75
°
;边缘驱动支链与动平台的连接处和动平台几何中心位置的连线为a1;同一支链下端与静平台的连接处和静平台几何中心位置的连线为a1,在空间中a1和a1平行。
10.通过采用上述的技术方案,本实用新型的有益效果是:
11.1.本实用新型的拾取机械手中拾取结构可以通过正反牙滚珠丝杠装置和旋转管件实现位置调节,实现对不处于同一水平线上的多个袋装面包的同时拾取。
12.2.本实用新型的拾取结构拾取食品可实现对大小不一的袋装面包的拾取。
13.3.本实用新型的基座具有三个转动自由度与一个移动自由度,转动角度范围大,同时可实现沿垂直于静平台方向的运动,实现机械手灵活运动,扩大工作空间。
附图说明
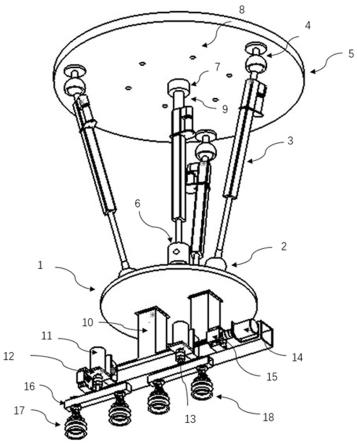
14.图1为本实用新型外观的示意图;
15.图2为本实用新型公开的机械手拾取机构的装配示意图;
16.图3为本实用新型公开的3-sps/upr并联机构的装配示意图;
17.图4为3-sps/upr并联机构的机构简图。
18.图5为正反牙滚珠丝杠装置;
19.图6为伺服电缸内部结构图;
20.图7为虎克铰示意图;
21.图8为真空吸盘座与真空吸盘连接的装配示意图。
22.附图标记:1、动平台,2、第一球铰副,3、伺服电缸,31、伺服电机,32、轴承装置,33、传动机构,34、驱动机构,35、位移传感器,36、推杆,37、绝对值位移编码器,4、第二球铰副,5、静平台,6、虎克铰,61、上支座,62、下支座,63、十字轴,7、滚动轴承,8、静平台螺纹通孔,9、转轴,10、支架方管,11、第一有刷直流电机,12、第一电机固定架,13、第一联轴器,14、第二有刷直流电机,15、正反牙滚珠丝杠装置,151、支撑端轴承座,152、螺母座,153、螺母,154、丝杠,155、固定端轴承座,156、正牙螺纹,157、反牙螺纹,16、旋转管件,17、真空吸盘座,18、真空吸盘,19、动平台螺纹通孔,20、第二联轴器,21、第二电机固定架。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合具体实施方式对本实用新型进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,但并不用于限定本实用新型。
24.如图1所示,一种拾取袋装面包的机械手,该结构由拾取结构与基座连接组成。
25.如图1-2和5所示,拾取机构包括支架方管10、第一有刷直流电机11、第一电机固定架12、第一联轴器13、第二有刷直流电机14、正反牙滚珠丝杠装置15、旋转管件16、真空吸盘座17、真空吸盘18、动平台螺纹通孔19、第二联轴器20、第二电机固定架21。拾取结构中支架方管10由两段短方管焊接在一个长方管外表面上。长方管的一个竖直方向的侧面两端各钻2个螺纹孔,用于分别与正反牙滚珠丝杠装置15中支撑端轴承座151两侧的螺纹孔与固定端轴承座155两侧的螺纹孔通过螺钉固定,使丝杠装置15平稳运行。正反牙滚珠丝杠装置15由
丝杠154、螺母153、螺母座152、支撑端轴承座151、固定端轴承座155组成。丝杠154可购买于swf斯威孚传动科技公司,滚珠采用g10级gcr15钢珠耐磨、低噪。两端的支撑端轴承座151与固定端轴承座155为标准安装座。支撑端轴承座151为bf15支撑端,固定端轴承座155为bk15固定端。螺母153通过内部螺纹与丝杠154通过螺纹连接,选用钢制螺母座152,使其内部恰好套在螺母153外部,螺母153通过法兰端面的螺纹孔与螺母座152侧面的螺纹孔通过螺钉连接,实现固定。螺母座153上表面有螺纹孔,可固定其他构件。从正前方向看,丝杠154左侧为正牙螺纹155、右侧为反牙螺纹156,中间光滑,无螺纹,丝杠154旋转,带动丝杠154上连接的螺母座152和固定在螺母座152上表面的装置实现同时向中间运动或同时向两端运动,由于螺母座152固定的装置下端为旋转管件16,长度较长,避免相碰撞,所以丝杠154中间无螺纹的距离较长。丝杠154中间无螺纹的距离大于旋转管件16长度。丝杠154在固定端轴承座155一侧伸出一段距离,伸出的这部分丝杠154表面光滑,无螺纹,可以实现与第二联轴器20一端内部孔的连接,联轴器20另一端内部孔则与第二直流有刷电机14的输出轴相连,通过控制第二直流有刷电机14带动丝杠154旋转,使丝杠154上连接的螺母座152与螺母座152固定的装置实现同时向中间运动或同时向两端运动。第一电机固定架12和第二电机固定架21都由垂直架和底座组成,垂直架包含一个直径大的中心台阶孔,用于分别插入第一直流有刷电机11和第二直流有刷电机14的输出转轴,同时中心台阶孔两侧对称分布螺丝孔,通过小螺钉分别实现对第二直流有刷电机14位置的固定。底座分布螺纹孔,实现对第二电机固定架21的固定与连接。两个螺母座152上表面都通过螺纹孔与第二电机固定架21,利用螺钉实现连接与固定。第一有刷直流电机11通过小型螺钉与第一电机固定架12连接,实现对第一有刷直流电机11的固定。第一有刷直流电机11的转轴正下方的第一联轴器13一端的孔连接。同时第一联轴器13另一端孔与旋转管件16的圆钢161连接,通过第一联轴器13实现第一有刷直流电机11驱动旋转管件16的旋转。旋转管件16中圆钢161与不锈钢的短方管162焊接而成。从短方管162上方两侧各钻一个通孔,真空吸盘座17插入通孔,通过真空吸盘座17上方的螺母实现与短方管162的固定连接。如图7所示,由于真空吸盘18材料柔软,所以将真空吸盘18窄口套在真空吸盘座17的末端,实现固定,真空吸盘座17与真空吸盘18内部实现内部连通,真空吸盘座17的通气口171与外部真空发生装置相接,空气可流动,实现吸附袋装面包的功能。通过控制两个第一有刷直流电机11旋转,分别带动两个旋转管件16进行转动,可实现四个真空吸盘18的位置变化,实现对传送带上不同位置的小型袋装面包抓取。
26.第一有刷直流电机11为现有结构,可购买于深圳新勇泰电机有限公司,型号为ga36y-520-ce,额定力矩大。
27.第二有刷直流电机14为现有结构,可购买于广州鑫协电器科技有限公司,型号为xx37ga555r-24-20,转速较快,额定力矩较大。
28.如图1和3所示,基座为3-sps/upr并联机构。3-sps/upr并联机构构型中的s代表球铰副,p代表移动副,u代表虎克铰副,r代表转动副。3-sps/upr内含四条驱动支链,sps支链为边缘驱动支链,两端都为球铰副、中间为移动副;upr支链为一条中央驱动支链,与动平台1下表面的中心相连的一端为虎克铰6,与静平台5上表面中心相连的另一端为转动副,中间为移动副。具体为基座包括中央驱动支链、三个相同的边缘驱动支链以及上下相对布置的静平台5、动平台1。动平台1连接机械手末端的袋装面包拾取机构,支架方管10中两段短的方管底部螺纹孔和动平台1的动平台螺纹通孔19通过螺钉实现固定。静平台5上通过静平台
螺纹通孔8与其他部件通过螺栓连接。边缘驱动支链由第二球铰副4、伺服电缸3、第一球铰副2组成。伺服电缸3底部连接第二球铰副4,伺服电缸3的推杆36前端连接球铰副2。每一个驱动支链下端通过第二球铰副4与静平台5固定连接,上端通过第一球铰副2与动平台1固定相连,实现边缘驱动支链的安装,如图4所示,初始安装条件下边缘驱动支链与静平台5之间的夹角α=75
°
。三条边缘驱动支链上端与动平台1的连接处到动平台几何中心位置的距离都相等,组成以动平台1几何中心位置为圆心,以连接处和动平台1几何中心位置之间距离的圆,且两相邻连接处到动平台1几何位置中心连线所组成的夹角β都为120
°
;三条边缘驱动支链的下端与静平台5的连接处到静平台5几何中心位置的距离都相等,组成以静平台5几何中心位置为圆心,以连接处和静平台5几何中心位置之间距离的圆,且两相邻连接处到静平台5几何中心连线所组成的夹角β都为120
°
。初始安装条件下,并联机构边缘驱动支链上端与动平台1的连接处,和动平台1几何中心位置的连线为a1;同一支链下端与静平台5的连接处,和静平台5几何中心位置的连线为a1,在空间中a1和a1平行。并联结构的中央驱动支链沿垂直静平台5的方向看是一个点,其包括虎克铰6、伺服电缸3、滚动轴承7、转轴9;如图6所示,虎克铰6中上支座61与下支座62以十字轴63的几何中心为旋转中心旋转,伺服电缸3底部端面与转轴9的上断面固定相连,推杆36前端与虎克铰6下支座62固定连接,中央驱动支链上端通过虎克铰6的上支座61与动平台1表面几何中心位置固定连接,中央驱动支链下端则是将滚动轴承7固定在静平台5的几何中心位置上方,转轴9与滚动轴承7组成转动副,同时转轴9的轴线与伺服电缸3推杆36的轴线方向重合,垂直于静平台5平面,则虎克铰6的下支座62和伺服电缸3可沿此轴线旋转,使动平台1运动更加灵活。在此机构中,由于三个边缘驱动支链都具有六个自由度,但中央驱动支链限制了对空间坐标系中x、y轴两个方向的移动自由度,故机构具有三个转动自由度和一个沿空间坐标系z轴方向的移动自由度,中央驱动支链上端的虎克铰6中上支座61与下支座62以十字轴几何中心63为旋转中心,上支座61带动与其固定连接的动平台1绕空间坐标系中的x、y、z轴的旋转角度范围都为-15
°
~+15
°
,同时动平台1可以沿垂直于动平台1的方向进行上下移动,保证动平台1与其固定的袋装面包拾取机构实现前后俯仰,左右翻转、顺、逆时针的旋转和上下移动。对机械手而言,满足其工作要求,可以通过旋转与平移运动使得拾取机构实现灵活运动,进行位姿微调。
29.如图5所示,伺服电缸3为现有结构,可购买于美国exlar公司,型号为k60。伺服电缸3由伺服电机31、轴承装置32、传动机构(齿轮)33、驱动机构(滚珠丝杠)34、位移传感器35、推杆36和绝对值位移编码器37组成,由于动平台1上需要连接拾取结构,伺服电缸3的驱动机构34端部安装有多圈绝对值位移编码器37作为位置反馈装置,实时反馈推杆36的位移。
30.工作原理:
31.本实用新型专利结构拾取袋装面包的方式为吸附方式。真空吸盘18与真空吸盘座17连通后,采用了真空原理,可利用真空负压对面包进行吸附。如图2和图8所示:通气口171与外部真空发生装置相接,当外部真空发生装置启动后,通气口171通气,真空吸盘17内部的空气被抽走,形成了压力为p2的真空状态。此时,真空吸盘18内部的空气压力低于真空吸盘18外部的大气压力p1,即p2《p1,工件在外部压力的作用下被吸起。真空吸盘18内部的真空度越高,真空吸盘18与袋装面包之间贴的越紧。通过控制真空吸盘18内部的真空度,不会对包装袋中的面包产生影响。
32.对于拾取结构,初始状态下正反牙滚珠丝杠装置15中两螺母座152的位置对称分布,两螺母座152距离较近,且两螺母座152下方的旋转管件16的短方管162没有接触。首先通过控制正反牙滚珠丝杠装置15中的第二直流有刷电机14带动丝杠154旋转,从正前方向看,丝杠154上连接的螺母座162和螺母座162表面固定的装置实现同时向两端运动,实现旋转管件16的平移运动。然后通过分别控制两个第一有刷直流电机11转动,带动两个旋转管件16进行转动,可实现四个真空吸盘18的位置变化,使得真空吸盘18中心位置处于传送带上零散的袋装小面包上方,启动外部真空发生装置,实现同时对传送带上不同位置的袋装小型面包的吸附。当运送到放置处上方时,关闭外部真空发生装置,袋装小面包掉落。对于细长型袋装大面包的拾取,工人通过分别控制两个第一有刷直流电机11改变两个旋转管件16位置,从俯视角度看,当两个旋转管件16的短方管162同时平行于支架方管10中长的管件时,启动外部真空发生装置,四个真空吸盘18实现同时吸附,当运送到放置处上方时,关闭外部真空发生装置,袋装面包掉落;对于一个宽厚型袋装大面包的拾取,工人通过控制有刷直流电机11改变旋转管件16位置,从俯视角度看,当两个旋转管件16的短方管162同时垂直于支架方管10中长的管件时,启动外部真空发生装置,四个真空吸盘18实现同时吸附,当运送到放置处上方时,关闭外部真空发生装置,袋装面包掉落。
33.对于此类拾取袋装面包机械手的基座结构,为并联机构,当并联机构中的三个相同边缘驱动支链中三个伺服电缸3的推杆36不断伸长或缩短,实现在静平台5保持不动的情况下带动动平台1和与其固定连接的虎克铰6中上支座61,以虎克铰6中十字轴63中心位置为旋转中心进行旋转摇摆的;同时中间驱动支链中伺服电缸3的推杆36不断伸长或缩短使得动平台1沿垂直与静平台5的竖直方向进行上下运动,即动平台1的几何中心位置沿伺服电缸3的推杆36的轴线方向上下竖直移动;边缘支链与中间驱动支链的协作使得动平台1的位姿不断发生改变。通过控制此机构四个驱动支链中推杆36的位移变化量控制动平台1的位姿,达到对动平台1的控制,使固定连接在动平台1上的拾取机构灵活旋转的同时可以实现下降与上升的平移运动,满足机构的工况条件,达成任务要求。
34.机械手基座中,三个边缘驱动支链和中央驱动支链中伺服电缸3的推杆36共同向外伸出,且三边缘支链推杆的运动距离相同,使动平台1与所连拾取结构沿垂直于静平台5的方向,即竖直向下方向做平移运动,当各个驱动支链的伺服电缸3中的绝对值位移编码器37检测到推杆36伸长至指定位置时,各驱动支链中伺服电机3的推杆36停止运动,动平台1位姿固定,然后拾取结构开始运行,对传送带上不同的袋装面包进行拾取。当拾取任务完成后,并联机构中三个边缘驱动支链和中央驱动支链中伺服电缸3的推杆36共同向内收缩,三个边缘驱动支链的伺服电缸3的推杆36的运动距离相同,使动平台1沿垂直于静平台5的方向靠近静平台5做平移运动,当各驱动支链的伺服电缸中3的绝对值位移编码器37检测到推杆36缩短至指定位置时,实现拾取结构位置上移。
35.本实用新型虽然已经给出了一些实施例,但是本领域的技术人员应当理解,在不脱离本实用新型精神的情况下,可以对本文的实施例进行修改。上述实施例只是示例性的,不应以本文的实施例作为本实用新型权利范围的限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1